雙叉臂式獨立懸架四輪定位的效率提升
2019-08-07 06:19:38羅曉龍熊武李海寧張德安
汽車實用技術 2019年14期
羅曉龍,熊武,李海寧,張德安
雙叉臂式獨立懸架四輪定位的效率提升
羅曉龍,熊武,李海寧,張德安
(江西五十鈴汽車有限公司,江西 南昌 330800)
針對雙叉臂式獨立懸架的四輪定位提出了一種高效的調整方案,該方案采取偏心螺栓初始值設定→人工微調→助力臂定扭的方式進行調整,極大的提升了四輪定位的節拍,降低了員工的勞動強度。
雙叉臂;四輪定位;效率提升
前言
在汽車制造業中,JPH常被用來測算和表征企業的生產能力。由于采用流水線的生產方式,單個工序的生產瓶頸往往對整個工廠的生產節拍有著至關重要的影響。而雙叉臂式獨立懸架的四輪定位往往通過調節前輪左右下擺臂的4個偏心螺栓來實現,因為下擺臂安裝在底盤線,安裝完畢后車輛行駛至檢測線的四輪定位工位,每個偏心螺栓的位置都需要先根據實際情況進行調整,并且進行測力(力矩往往在200N左右),數量多加上強度高,其調整節拍往往很高,大部分總裝車間采用新增四輪定位平臺的方法來緩解此類問題,不但費用高而且占用場地,還需新增人員,成本較大。
本文通過對雙叉臂式獨立懸架的四輪定位調整工藝進行優化,將四輪定位的節拍提高了50%,極大的提高了生產效率,滿足了現場需要。
1 工藝優化
1.1 偏心螺栓及橫拉桿螺母初始值確定
首先需在下擺臂偏心螺栓上設置刻度線,車架上需設置標識線,如圖1。

圖1
然后將車輛開上集成式四輪定位臺,根據電腦數據顯示將前束、外傾角及主銷后傾角調整至最佳的0值(前束:0°±0.14°;前輪外傾角:0°±30';主銷后傾角:3°20'±45',基準值均可內置在設備參數中,員工僅需將數據調整至0即可),如圖2。
此時記錄下四個偏心螺栓刻度線與車架標識線的位置及拉桿螺母的螺紋牙位置。通過采集100臺車輛數據為樣本。取平均值確認初步的偏心螺栓、拉桿螺母初始值,將該數值反饋給底盤線的預緊工位,按要求對應偏心螺栓刻度線與車架標識線。車輛按照統一刻度裝配擰緊后,行駛至四輪定位工位,查看并記錄車輛四輪定位未調整前的各參數值,發現僅有20%左右的車輛在四輪定位工位不需要調整下擺臂螺栓數據便在合格范圍內,省去了檢測線工位的調節時間。而其它車輛均有一至四個參數處于合格范圍邊緣,對記錄的參數進行統計分析,并對偏心螺栓的初始刻度進行微調。重復上述操作,發現車輛的一次通過率并沒有明顯的提升,一直停留在20%左右。這是因為車輛零部件的一致性無法保證,即使選擇了合理的初始值,在保證裝配一致性的前提下車輛的各項參數波動一樣較大,僅僅靠初始值的設定難以大幅提高四輪定位的檢測節拍。
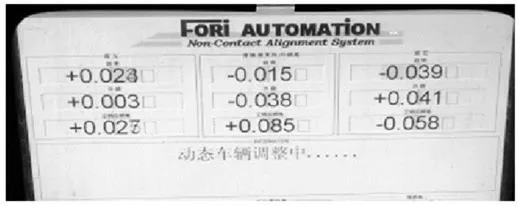
圖2
1.2 人工調整方案優化
在設定完初始值后,雖然車輛的一次通過率并不高,但各參數的數值基本均在合格范圍邊界波動,且波動的幅度并不大,如下圖(標注★為不合格項):

圖3 左側前束NG,右側前束、主銷后傾角NG
同時,在四輪定位的調校過程中發現,前束、外傾、主銷后傾角存在聯動關系,且成一定的比例(1:-0.05:-0.2),即前束數值調整1,主銷后傾角數值變化為-0.2,外傾值變化為-0.05,利用該比例關系,當發現如圖3所示的情況是,左側僅需調整前束螺母(-0.4+0.4=0),外傾角變(+0.075-0.02 =+0.055),主銷后傾角變為(+0.561-0.08=0.481),均在合格范圍內;而右側也可通過單調整前束(-1.287+1.287=0),外傾角變為(=0.181-0.233=-0.052),主銷后傾角變為(+0.8-0.257 =+0.54),也均在合格范圍內。這種情況僅僅只需調整兩個前束螺母就可以滿足參數需求,極大的提高了四輪定位的檢測節拍。
1.3 省力優化方案
無論下擺臂螺栓是否需要調節,因為底盤線工位偏心螺栓僅預緊(方便四輪定位調整時松開不費力),而偏心螺栓又屬于關鍵項,有定扭要求,一般擺臂的力矩在200N左右,使用定扭扳手定扭不但費時,而且員工的勞動強度也較大。因此使用定扭電槍定扭不僅可以滿足工藝要求,同時也可以減輕員工勞動強度,提高定扭效率。但是由于力矩較大,定扭電槍的總體質量較重,且反作用力大,必須設計省力化工裝配合定扭電槍使用,才可達到預期的效果。
一般主機廠四輪定位調整工位都設置在地坑內,且站位平臺狹長,設計難度較大。如圖4:

圖4
本文設計的省力化工裝,結合生產實際,將基座固定在塌臺外側,減少與員工操作空間的干涉,并且利用懸臂作為反力臂,避免加增反力桿導致定扭電槍在操作時與車架干涉,操作不便。如下圖5:

圖5 1—基座,2—軸承,3—懸臂,4—彎頭定扭電槍
當擺臂螺栓調整合格后,使用省力化工裝結合定扭電槍,可迅速將螺栓擰緊至規定力矩,比人工使用定扭扳手勞動強度大大降低,效率也有很大的提高。
2 結束語
相較于傳統四輪定位調整及定扭工藝,本次采用的偏心螺栓初始值設定+人工微調+助力臂定扭,可將四輪定位的整體節拍提升50%以上,極大的提升了效率,減輕了員工的勞動強度。
[1] 劉云泊,顧承揚.淺析如何提升總裝車間后橋四輪定位一次合格率[J].汽車實用技術, 2018(17): 256-259.
[2] 洪翎,王強,劉道全.乘用車總裝檢測線工藝設計及應用[J].機械制造與自動化, 2017(03): 89-90.
[3] 黃永毅,蔣玲麗,周浩浩.四輪定位設備一致性控制改進[J].時代汽車, 2018(12): 113-117.
[4] 胡國武.前束外傾鎖緊螺母擰緊力矩值保存和追溯[J].時代汽車, 2018(12): 151-153.
[5] 劉冬梅,王五林,曲大義,楊希銳,賈彥峰.基于懸架系統的四輪定位參數優化分析[J].青島理工大學學報,2017(06): 102-107.
Efficiency improvement of four-wheel positioning of double fork armindependent suspension
Luo Xiaolong, Xiong Wu, Li Haining, Zhang Dean
( Jiangxi ISUZU Motors CO., LTD, Jiangxi Nanchang 330800 )
An efficient adjustment scheme is proposed for the four-wheel positioning of the double-fork arm independent suspension, which adopts the method of eccentric bolt initial value setting, manual fine-tuning and booster arm setting and torsion adjustment, greatly improving the four-wheel positioning beat and reducing the labor intensity of employees.
Double cross arm; Four-wheel positioning; Efficiency improvement
U468.2
A
1671-7988(2019)14-156-02
U468.2
A
1671-7988(2019)14-156-02
羅曉龍,碩士,機電工程師,就職于江西五十鈴汽車有限公司,研究方向:汽車總裝工藝的優化。
10.16638/j.cnki.1671-7988.2019.14.050
