基于進(jìn)化神經(jīng)網(wǎng)絡(luò)重型汽車ABS故障診斷研究
2019-08-13 06:45:08謝敬友
設(shè)備管理與維修 2019年7期
謝敬友
(德州職業(yè)技術(shù)學(xué)院,山東德州 253000)
1 重型汽車ABS制動(dòng)系統(tǒng)分析
ABS(Antilock Brake System,防抱死制動(dòng)系統(tǒng))是汽車制動(dòng)系統(tǒng)上的主動(dòng)安全裝置,其對(duì)重型汽車的安全行駛有較大影響。重型汽車的ABS裝置通常包括車輪速度傳感器、電子控制單元(Electronic Control Unit,ECU) 和制動(dòng)壓力調(diào)節(jié)器(Hydraulic Control Unit,HCU)(圖 1)。
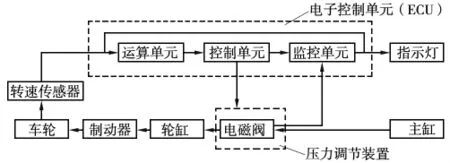
圖1 ABS制動(dòng)系統(tǒng)
(1)輪速傳感器。車輪速度傳感器是感知車輪轉(zhuǎn)速并將信號(hào)傳遞給單子控制單元。
(2)電子控制單元。電子控制單元計(jì)算每個(gè)車輪速度,對(duì)操作機(jī)構(gòu)發(fā)出指令。
(3)制動(dòng)壓力調(diào)節(jié)器。制動(dòng)壓力調(diào)節(jié)裝置通過(guò)電子控制單元的指令開(kāi)啟和關(guān)閉電磁閥改變制動(dòng)系統(tǒng)的壓力,使車輪保持最佳制動(dòng)狀態(tài)。
2 進(jìn)化神經(jīng)網(wǎng)絡(luò)算法
2.1 算法理論分析
BP(Back Propagation,神經(jīng)網(wǎng)絡(luò))具有很高的非線性表達(dá)能力,可以建立從n維特征空間到m維空間的映射關(guān)系n和m分別是是模型的輸入和輸出個(gè)數(shù),BP網(wǎng)絡(luò)結(jié)構(gòu)中的輸入和輸出由要解決的問(wèn)題確定。通過(guò)遺傳算法進(jìn)行全局優(yōu)化可以獲得良好的學(xué)習(xí)效果并簡(jiǎn)化算法的使用。它主要由2個(gè)內(nèi)部和外部?jī)杉?jí)優(yōu)化過(guò)程組成:①外部進(jìn)化循環(huán)執(zhí)行BP網(wǎng)絡(luò)結(jié)構(gòu)參數(shù)的演化;②內(nèi)層進(jìn)化循環(huán)執(zhí)行初始權(quán)重的演化。
BP神經(jīng)網(wǎng)絡(luò)算法循環(huán)是在遺傳算法優(yōu)化的網(wǎng)絡(luò)結(jié)構(gòu)和初始權(quán)重之后執(zhí)行的,構(gòu)成了整個(gè)學(xué)習(xí)過(guò)程。
2.2 算法實(shí)現(xiàn)步驟
2.2.1 BP神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)參數(shù)的遺傳算法演化
在BP網(wǎng)絡(luò)結(jié)構(gòu)參數(shù)優(yōu)化循環(huán)中,遺傳算法用于搜索BP網(wǎng)絡(luò)結(jié)構(gòu)參數(shù)。
2.2.2 BP神經(jīng)網(wǎng)絡(luò)初始權(quán)重遺傳算法的優(yōu)化計(jì)算
對(duì)于在遺傳算法的演化周期中生成的每個(gè)BP神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)參數(shù)組,可以根據(jù)BP網(wǎng)絡(luò)的連接機(jī)制來(lái)計(jì)算諸如權(quán)重系數(shù)的數(shù)量之類的信息。適應(yīng)值計(jì)算公式:

式中 Oi,j——預(yù)測(cè)結(jié)果
n——樣本個(gè)數(shù)
m——輸出個(gè)數(shù)
2.2.3 優(yōu)化后初始權(quán)值的訓(xùn)練
遺傳進(jìn)化算法具有出色的全局搜索能力,但在局部精度方面無(wú)法加深。因此,對(duì)于上述2個(gè)步驟中生成的每個(gè)模型結(jié)構(gòu)參數(shù)及其優(yōu)化的初始權(quán)重,有必要根據(jù)通用BP算法進(jìn)行學(xué)習(xí)訓(xùn)練,并進(jìn)行局部?jī)?yōu)化。全局和本地兩層優(yōu)化網(wǎng)絡(luò)權(quán)重和相應(yīng)結(jié)果參數(shù)的組合,構(gòu)成了在當(dāng)前網(wǎng)絡(luò)結(jié)構(gòu)配置下可以實(shí)現(xiàn)的最佳BP網(wǎng)絡(luò)模型。
3 重型汽車ABS故障診斷模型
根據(jù)ABS的工作原理和信號(hào)采集特性,下面將采用x1縱向速度,x2橫向速度x3左前輪速度,x4右前輪轉(zhuǎn)速,x5左后輪轉(zhuǎn)速,x6右后輪轉(zhuǎn)速作為BP神經(jīng)網(wǎng)絡(luò)的輸入,將不同條件下的相應(yīng)故障類型的預(yù)期值作為輸出。輸出類型為:y1無(wú)故障,y2左前調(diào)節(jié)器故障,y3右前調(diào)節(jié)器故障,y4左后調(diào)節(jié)器故障,y5右后調(diào)節(jié)器故障。
3.1 學(xué)習(xí)樣本收集
通過(guò)上述分析,有6個(gè)故障特征因子和5個(gè)故障類型,分別對(duì)應(yīng)BP神經(jīng)網(wǎng)絡(luò)的6個(gè)輸入層節(jié)點(diǎn)和5個(gè)輸出層節(jié)點(diǎn)。每種故障類型包含10組樣本,總共50組樣本數(shù)據(jù)。ABS調(diào)節(jié)器訓(xùn)練及檢驗(yàn)樣本的選取分別取 0.3 s、0.4 s、0.5 s、0.6 s、1.5 s、1.8 s、3.2 s、3.8 s、4.2 s、4.5 s時(shí)的速度值作為特征信號(hào),5 種故障類型各10組樣本(表1)。其中,以 0.6 s時(shí)的數(shù)據(jù)信息為檢測(cè)樣本,其他數(shù)據(jù)信息作為訓(xùn)練樣本。

表1 0.6 s時(shí)檢測(cè)樣本數(shù)據(jù)m/s
根據(jù)神經(jīng)網(wǎng)絡(luò)算法規(guī)則對(duì)目標(biāo)輸出值進(jìn)行二進(jìn)制設(shè)置,對(duì)編號(hào)1無(wú)故障編碼為(10000);對(duì)編號(hào)2左前故障編碼為(01000);對(duì)編號(hào)3右前故障編碼為(00100);對(duì)編號(hào)4左后故障編碼為(00010);對(duì)編號(hào)5右后故障編碼為(00001)。樣本數(shù)據(jù)的大小變化較大,為更高效進(jìn)行算法計(jì)算,需要對(duì)數(shù)據(jù)進(jìn)行歸一化處理,使得樣本數(shù)據(jù)輸入和輸出值在(-1,1)范圍內(nèi)[6]。
3.2 ABS故障診斷模型建立
在模型學(xué)習(xí)訓(xùn)練過(guò)程中,模型學(xué)習(xí)誤差設(shè)置為0.000 1,模型學(xué)習(xí)訓(xùn)練由Matlab軟件完成。遺傳算法參數(shù)設(shè)置為:種群30,最大迭代次數(shù)為110,交叉概率為0.3,變異概率為0.1;模型為3層網(wǎng)絡(luò),輸入?yún)?shù)為6。輸出參數(shù)為5(圖2),網(wǎng)絡(luò)訓(xùn)練過(guò)程中神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)和初始權(quán)值進(jìn)化代數(shù)為8時(shí)趨于穩(wěn)定(圖3),網(wǎng)絡(luò)訓(xùn)練次數(shù)為5000時(shí),模型輸出誤差趨于穩(wěn)定。

圖2 最佳適應(yīng)值變化
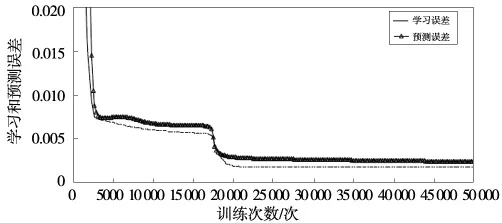
圖3 模型預(yù)測(cè)誤差變化
3.3 故障診斷模型檢驗(yàn)
將1.5 s時(shí)的調(diào)節(jié)器檢測(cè)樣本輸入訓(xùn)練好的網(wǎng)絡(luò),經(jīng)遺傳神經(jīng)網(wǎng)絡(luò)診斷系統(tǒng)得出的ABS調(diào)節(jié)器故障診斷結(jié)果如表2所示。
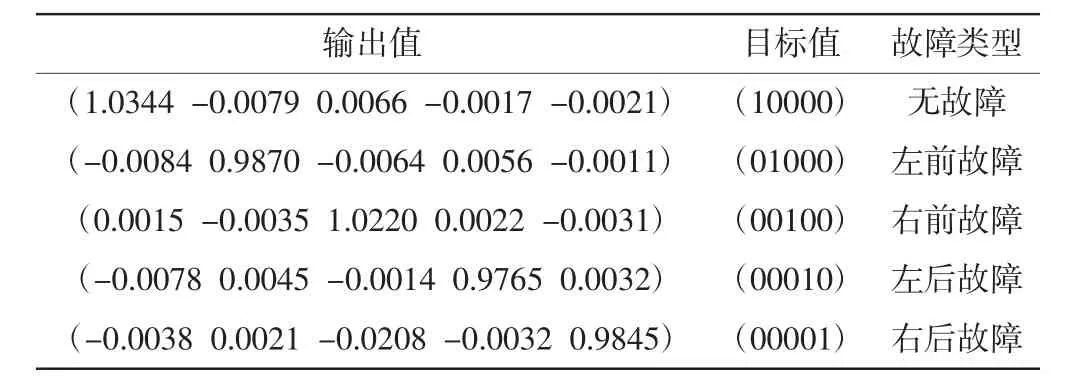
表2 檢測(cè)樣本輸出數(shù)據(jù)
通過(guò)表2可知,故障診斷模型有正確的輸出值,故障診斷模型有一定的實(shí)用價(jià)值。
4 結(jié)論
本項(xiàng)目通過(guò)對(duì)重型汽車ABS制動(dòng)系統(tǒng)分析,確定了ABS制動(dòng)系統(tǒng)結(jié)構(gòu)。對(duì)進(jìn)化神經(jīng)網(wǎng)絡(luò)算法進(jìn)行了分析,確定了算法實(shí)現(xiàn)的基本流程和方法。對(duì)學(xué)習(xí)樣本數(shù)據(jù)進(jìn)行了收集以及樣本數(shù)據(jù)的處理,得到50組樣本數(shù)據(jù),其中以0.6 s條件下的5組數(shù)據(jù)為檢測(cè)樣本。運(yùn)用Matlap軟件進(jìn)行了數(shù)據(jù)樣本的學(xué)習(xí)訓(xùn)練,得到了神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)和初始權(quán)值進(jìn)化代數(shù)為8,網(wǎng)絡(luò)訓(xùn)練次數(shù)為5000時(shí)的網(wǎng)絡(luò)模型。通過(guò)檢測(cè)樣本對(duì)故障診斷模型進(jìn)行了檢驗(yàn),通過(guò)檢驗(yàn)數(shù)據(jù),證明了該故障診斷模型有較高精度的輸出值。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測(cè)試與診斷(2014年5期)2014-03-01 01:14:21
