隨機森林算法在地鐵車輛門系統潤滑退化狀態預測中的應用*
2019-08-19 00:40:34付國平楊明輝邢海福支有冉
城市軌道交通研究 2019年7期
關鍵詞:系統
付國平 秦 征 楊明輝 邢海福 畢 雨 吳 亮 支有冉 施 文
(1. 杭州市地鐵集團有限責任公司,310003,杭州;2. 南京康尼機電股份有限公司,210013,南京;3. 南京航空航天大學自動化學院,210016,南京//第一作者,高級工程師)
地鐵車輛門系統的安全維護是列車安全運行的重要保障[1-2]。門系統中絲桿的良好潤滑是保障攜門架帶動門的重要基礎。對于地鐵維保工作而言,絲桿良好的潤滑性能可以保障絲桿的不毛刺,從而延長其壽命。文獻[4]通過分析發動機潤滑油功能元素和其高溫清凈性能的相關性關系,采用支持向量機算法和偏最小二乘算法進行預測,發現支持向量機算法的預測結果更優。文獻[5]在滾珠絲杠副油潤滑不良、油潤滑充分和脂潤滑充分3種潤滑條件下,基于小波分解的振動信號能力提取算法,建立遺傳算法優化后的BP神經網絡,發現診斷正確率達到90%。
目前我國尚缺乏對地鐵車輛車門絲桿的潤滑研究。本文基于杭州地鐵4號線車輛車門的潤滑加速試驗數據,提出了一種基于隨機森林(RF)算法的車門潤滑退化預測方法。仿真結果表明,與傳統的單分類器K-Means算法的診斷結果相比,RF算法在車門的潤滑退化預測中具有更高的精度,可以及時預測系統的潤滑退化征兆,對提高車門系統的安全性、可靠性,以及降低故障率具有重要意義。
1 地鐵車輛門系統
地鐵車輛門系統關鍵部件的潤滑退化會對車門運動產生較大的阻力,從而導致門系統發生故障。潤滑系統失效主要包括金屬磨損、保持架磨損和潤滑劑缺失3個影響因素。本文圍繞潤滑油問題研究單門系統健康度的變化趨勢,量化車門系統亞健康的健康度閾值,建立基于潤滑劑剩余量的車門系統退化模型,對地鐵車門關鍵部件的潤滑問題進行判斷預警,避免門系統故障的發生。車門系統通過配備的智能電機采集包括電機轉矩、轉速、角度等數據,并通過提取相關特征指標直接或間接有效地監控車門健康狀態的變化,并將上述特征指標作為后續地鐵車門狀態診斷的基礎。本文研究的車門系統配有智能電機,可返回電機轉矩、轉速和角度等數據。一次正常的開門或關門時間設定為3.5 s,一次采樣總共350個點。
車門的工作過程存在明顯的階段特性,因此對車門系統的健康狀態描述需要分段進行。本文建立在運行中的車門狀態評估特征集存在5個基本階段,即升速段、高速段、減速段、緩行段和到位后段。分別提取各運行階段的運行時間和行程,以及電機參數的最大值、最小值、均值、方差、 偏度和峰度等指標,并將其作為時域特征向量。本文選擇潤滑狀態下對車門影響較多的48個高速段特征組合形成一組特征向量F=[F1,F2,…,F48],用來表征車門的運動狀態。
2 RF算法原理
RF是由多個決策樹{h(x,Θk),k=1,2,…,n}組成的分類器群,其中{Θk}是相互獨立且同分布的隨機向量。通過對基分類器的集成和候選特征子集進行修改,使分類性能得到提高,最終由所有決策樹綜合投票決定輸出結果。
3 絲桿潤滑試驗方法
3. 1 試驗數據采集
本文數據來源于杭州地鐵4號線車輛臺架試驗數據。臺架起初處于潤滑油充足的狀態,對此時的電機數據進行采集,隨后人為地擦除潤滑油16次并采集每次擦除后的試驗數據,最終可得到17組電機數據。其中:1#數據顯示絲桿潤滑狀態良好,無潤滑油擦試;2#~17#數據顯示絲桿潤滑加速失效,有潤滑油擦試。
3. 2 基于RF算法的潤滑退化仿真分析
3. 2. 1 仿真結果分析
RF算法的診斷錯誤率前期隨著樹數量的增加而大幅降低,當決策樹數量達到40后,分類錯誤率趨于穩定(大約為0.001 6),但同時模型的復雜度和訓練時間會隨著樹數量的增加而增加。因此,本文選取RF算法分類樹的數量為40。綜合考慮模型的準確率與復雜度,進行以下2組仿真試驗。
1) 提取特征指標數據作為輸入,將正常數據和全部16組潤滑數據使用RF算法進行建模分析,仿真結果如圖1所示。從圖1的仿真結果可以看出,預測效果一般,準確率基本在50%左右。
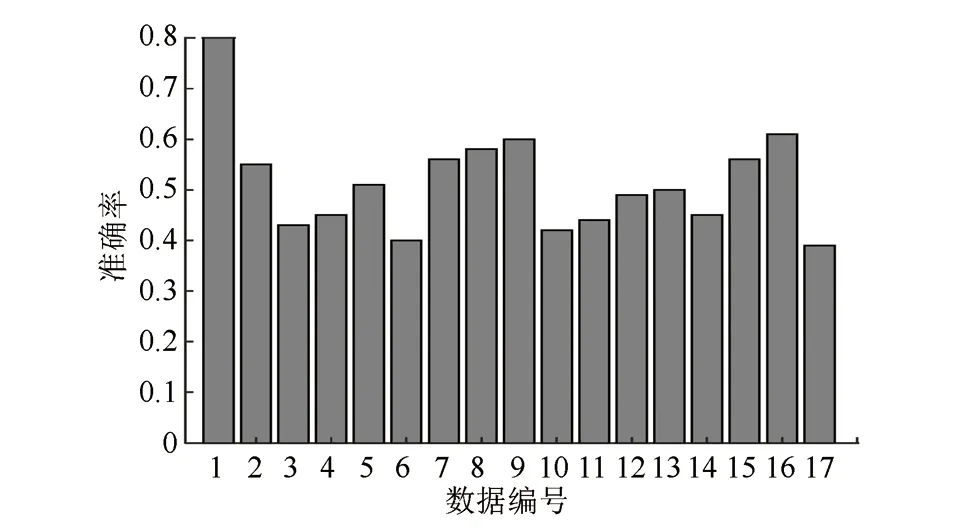
圖1 在線模型的預測準確率
2) 選擇第1組正常數據、第5組退化數據、第9組退化數據、第13組退化數據和第17組退化數據進行離線建模,得到5種模型,仿真結果如圖2所示。圖2的仿真結果表明,當減少離線模型的數量時,預測準確率均在85%以上,基本可以準確地預測車門系統潤滑退化的狀態。
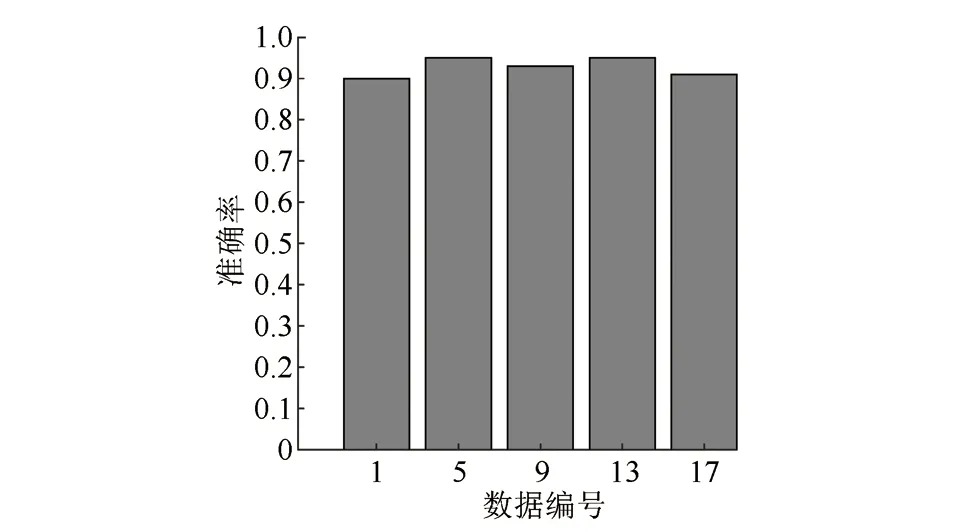
圖2 離線模型的預測準確率
3. 2. 2 與K-means算法的對比分析
本文除了利用RF算法對車門潤滑退化數據進行預測外,同時采用了K-means算法與RF算法進行了對比分析。與RF算法建模過程較為類似,K-means算法同樣使用高速段特征值。兩種算法的仿真結果對比如圖3所示。由圖3可知,發現RF算法在預測車門系統的潤滑退化問題中效果更好。
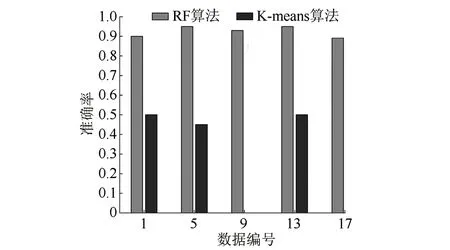
圖3 兩種算法預測準確率對比圖
4 結語
本文提出了一種基于RF算法的地鐵車輛門系統的潤滑退化預測方法,其預測準確率良好。針對車門的潤滑退化預測問題,與K-means算法相比,RF算法的診斷效果更好。因此,RF算法在地鐵車輛門系統的潤滑退化預測方面有著較好的實際推廣意義。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
