基于滑模觀測器的船用永磁推進電機位置辨識研究
2019-08-22 09:17:56何忠祥李成陽賈志強
船電技術(shù) 2019年8期
何忠祥,黎 曙,李成陽,賈志強
基于滑模觀測器的船用永磁推進電機位置辨識研究
何忠祥,黎 曙,李成陽,賈志強
(武漢船用電力推進裝置研究所,武漢 430064)
針對傳統(tǒng)滑模觀測器永磁同步電機轉(zhuǎn)子位置辨識存在特征頻次交流擾動的問題,分析了開關(guān)管死區(qū)效應(yīng)、導(dǎo)通壓降和電流采樣調(diào)理精度等非理想逆變對辨識反電動勢和轉(zhuǎn)子位置的影響,提出了一種基于內(nèi)嵌陷波器的同步旋轉(zhuǎn)坐標系鎖相環(huán)技術(shù),抑制了辨識反電動勢中特征頻次擾動信號對轉(zhuǎn)子位置辨識值的影響,并給出了新型鎖相環(huán)參數(shù)選擇確定的原則和依據(jù)。仿真結(jié)果表明該算法可以有效削弱逆變非理想特性對轉(zhuǎn)子位置辨識結(jié)果的影響,驗證了本文理論分析的正確性和所提策略的有效性。
永磁同步電機 無位置傳感器 滑模觀測器 非理想逆變 陷波器
0 引言
隨著稀土永磁材料剩磁性能的提高和自動控制技術(shù)的發(fā)展,永磁推進電機以其功率因數(shù)高、調(diào)速范圍寬等優(yōu)點在船用電力推進領(lǐng)域的應(yīng)用日益廣泛。為滿足高性能控制的要求,無論采用矢量控制還是直接轉(zhuǎn)矩控制都需要得到轉(zhuǎn)子位置信息。在船舶高濕度、高振動、高鹽霧的惡劣條件下,采用機械式位置傳感器會降低推進系統(tǒng)的可靠性,增加系統(tǒng)成本;因此,適用于永磁同步電機的無機械式位置傳感器控制技術(shù)得到日益廣泛的關(guān)注[1]。
根據(jù)轉(zhuǎn)子位置和反電動勢、定子磁鏈等電磁狀態(tài)量之間的關(guān)系,眾多學(xué)者提出了一系列的位置辨識策略。電機中高速工況運行時,基于滑模狀態(tài)觀測器的位置辨識策略以其動靜態(tài)特性好、抗參數(shù)攝動能力強的優(yōu)點應(yīng)用廣泛。根據(jù)永磁同步電機靜止兩相坐標系下基頻數(shù)學(xué)模型,文獻[2]-[3]以電流為觀測量,構(gòu)建了二階滑模觀測器模型,文獻[4]-[5]通過引入有效磁鏈和有效反電動勢,以電流和反電動勢為觀測量,建立了四階混合滑模觀測器模型;無論采用哪種滑模觀測器模型,最終都是利用反正切函數(shù)或者鎖相環(huán)從辨識反電動勢中提取出位置信息。雖然滑模觀測器有較好的魯棒特性,但位置辨識效果仍受電機參數(shù)偏差、死區(qū)效應(yīng)和相電流諧波分量等因素的影響,目前針對滑模變結(jié)構(gòu)位置辨識策略的研究主要集中在滑動模態(tài)高頻抖振信號的抑制和轉(zhuǎn)子位置信息的提取上,鮮有涉及位置辨識偏差的研究分析。
針對本文研究對象船用永磁同步電機,利用飽和函數(shù)和鎖相環(huán)技術(shù),本文給出了一種二階滑模觀測器位置辨識算法。詳細分析了逆變開關(guān)管死區(qū)效應(yīng)、開關(guān)管導(dǎo)通壓降和電機相電流非理想采樣對辨識反電動勢和位置辨識偏差的影響。在此基礎(chǔ)上,提出了基于內(nèi)嵌陷波器的新型鎖相環(huán)算法,給出了該算法參數(shù)選擇確定的依據(jù);該算法消除了位置辨識偏差中的特征諧波分量,并且增強了對滑動模態(tài)高頻抖振信號的抑制。最后通過仿真驗證了本文理論分析的正確性和所提策略的有效性。
1 滑模變結(jié)構(gòu)位置辨識模型
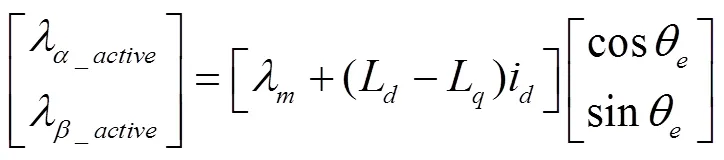
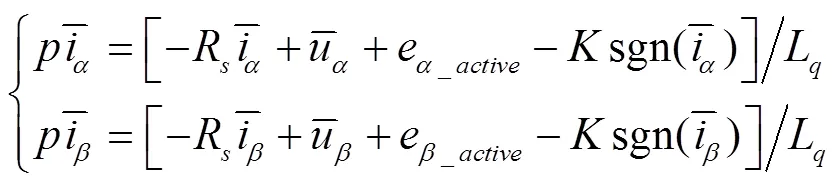
靜止兩相坐標系下,永磁同步電機轉(zhuǎn)子磁鏈可以用下式所示:

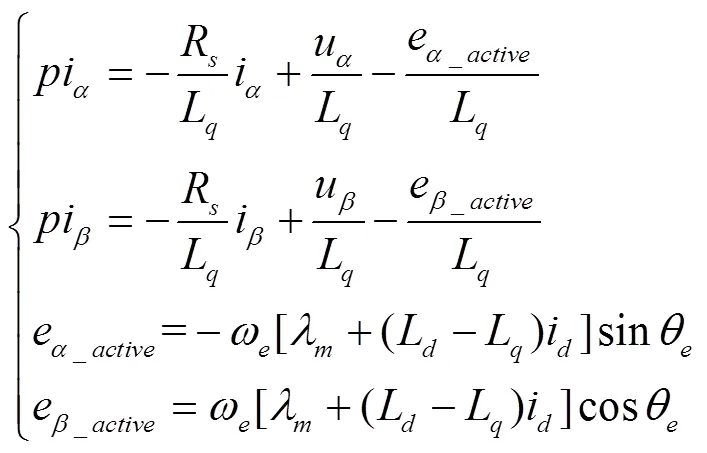
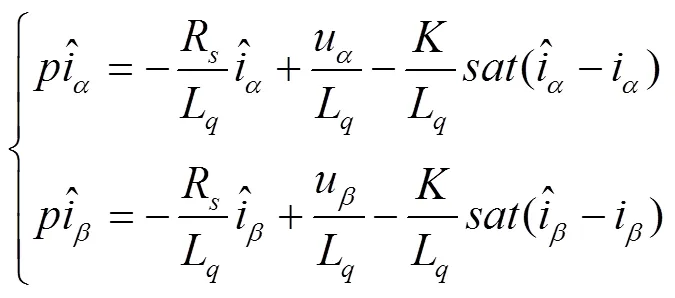
可以建立二階滑模變結(jié)構(gòu)狀態(tài)觀測器:

為抑制滑模觀測中的高頻抖振信號和降低鎖相環(huán)參數(shù)設(shè)計的難度,本文采用基于內(nèi)嵌低通濾波器的同步旋轉(zhuǎn)坐標系鎖相環(huán)技術(shù)獲得轉(zhuǎn)子轉(zhuǎn)速和位置信息,如圖1所示。
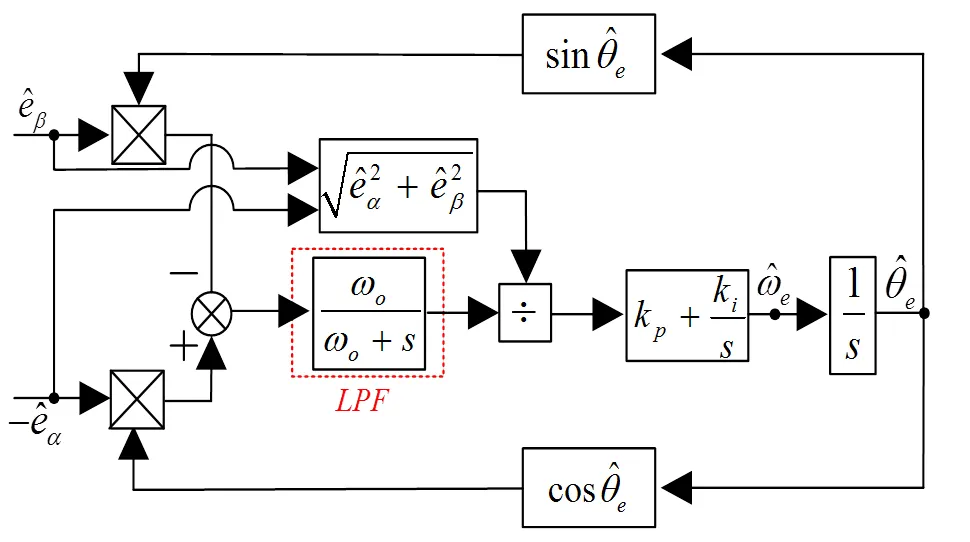
圖1 新型位置提取單元原理框圖
2 非理想特性對位置辨識影響
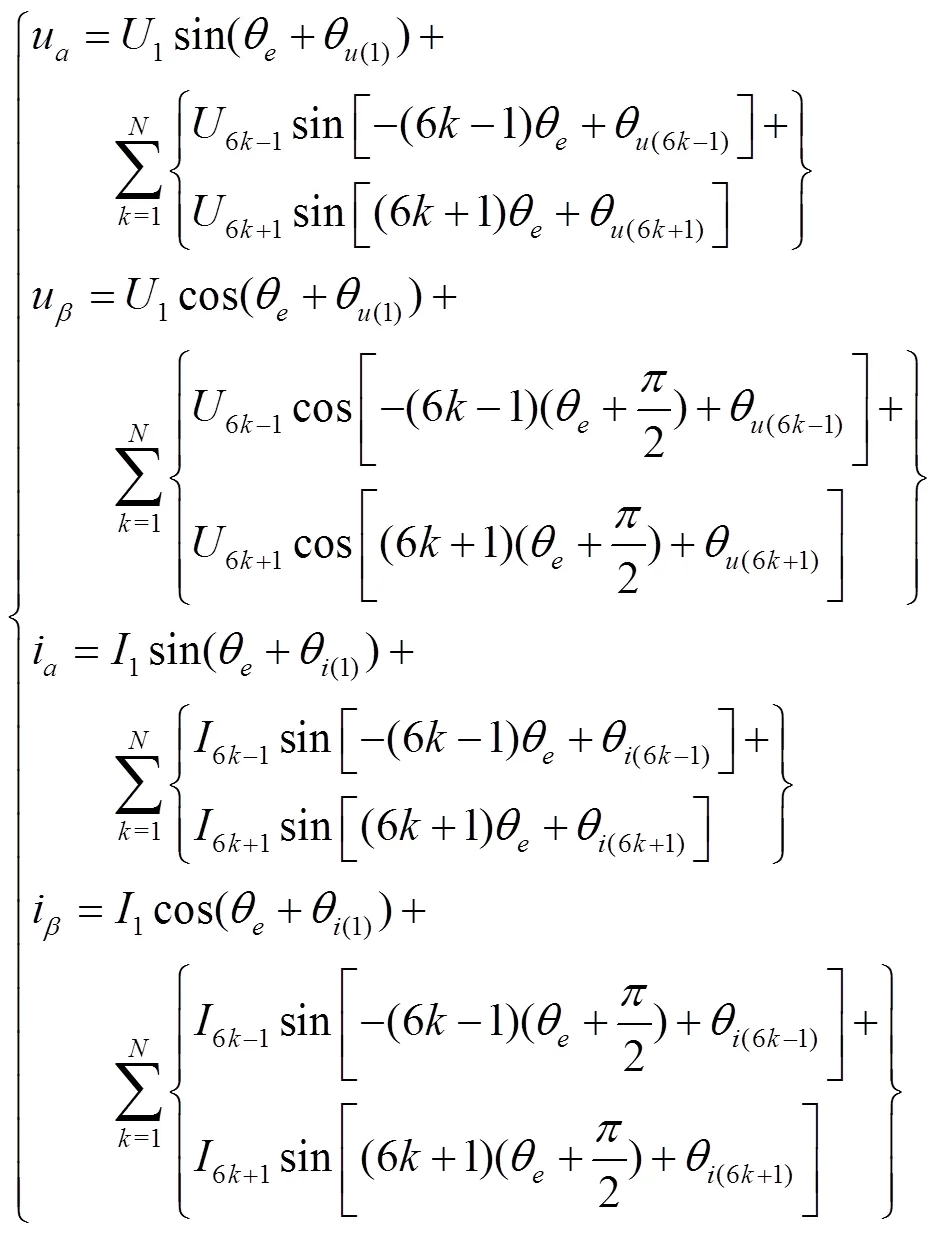
1) 電壓偏差影響分析
忽略零電流鉗位效應(yīng)影響,根據(jù)沖量守恒定律,逆變開關(guān)管平均誤差電壓表示為:


滑模觀測器輸出穩(wěn)定時,可得:
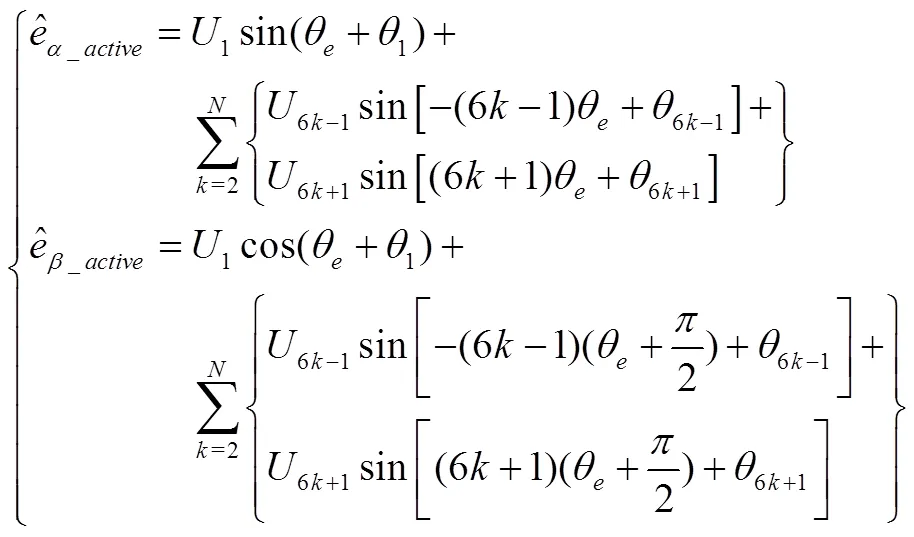
其中:

2)電流偏差影響分析
3 內(nèi)嵌陷波器的鎖相環(huán)算法
為抑制轉(zhuǎn)速辨識和位置辨識偏差中的諧波分量,本文采用一種新型陷波器替代圖1中的低通濾波器(LPF),該陷波器在保證對滑動模態(tài)高頻“抖動”信號抑制的前提下,還能消除位置辨識偏差中特征頻次的低頻諧波分量。
本文提出的內(nèi)嵌陷波器傳遞函數(shù)為:



品質(zhì)因數(shù)越大,陷波器窄帶濾波效果越好,性能越佳;但對頻率變化的敏感性也越強,因此,品質(zhì)因數(shù)的確定需要根據(jù)電機頻率波動范圍和窄帶濾波效果綜合考慮,本文選擇=0.707。
影響位置辨識偏差的通常是低階特征頻率分量,通過對轉(zhuǎn)速辨識值進行頻譜分析獲得需要抑制的諧波成分。本文提出的基于內(nèi)嵌陷波器的新型鎖相環(huán)和傳統(tǒng)鎖相環(huán)幅頻響應(yīng)特性如圖2所示。
對比傳統(tǒng)鎖相環(huán)算法,新型鎖相環(huán)算法在對低頻輸入信號保持高增益的前提下,對高頻噪聲信號有更強的抑制作用,并且能夠吸收輸入信號中特定頻率擾動分量;需要強調(diào)的是,內(nèi)嵌陷波器惡化了高頻分量相位滯后的情況,降低了響應(yīng)速度,減小了穩(wěn)態(tài)裕度,設(shè)計時需要特別注意。
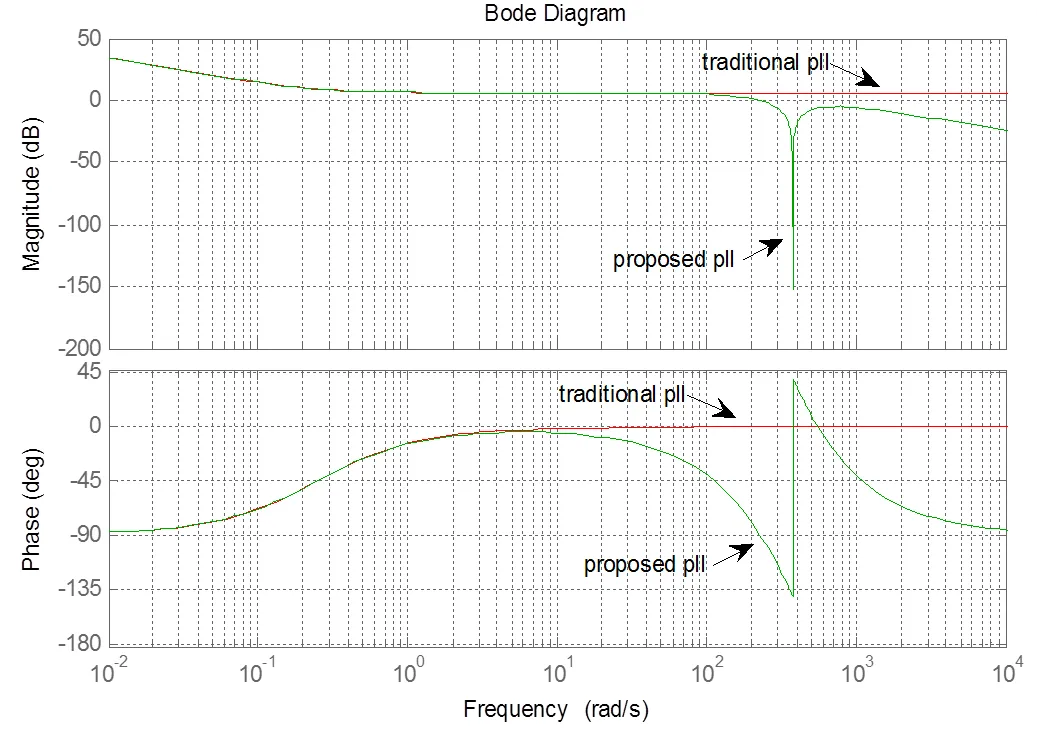
圖2 鎖相環(huán)波特圖對比
4 仿真和分析
為驗證本文理論分析的正確性和所提策略的有效性,運用Matlab/Simulink建立了船用永磁同步電機位置辨識模型。該電機額定電壓為400 V,額定電流為430 A,額定轉(zhuǎn)速為120 r/min,極對數(shù)為20,定子電阻為0.011Ω,交直軸電感為2.3 mH。驗證時設(shè)置開關(guān)管死區(qū)為2 μs,導(dǎo)通壓降為2 V;為模擬非理想采樣電路,A相電流采樣比例系數(shù)設(shè)為1.02,B相電流采樣比例系數(shù)為0.98。
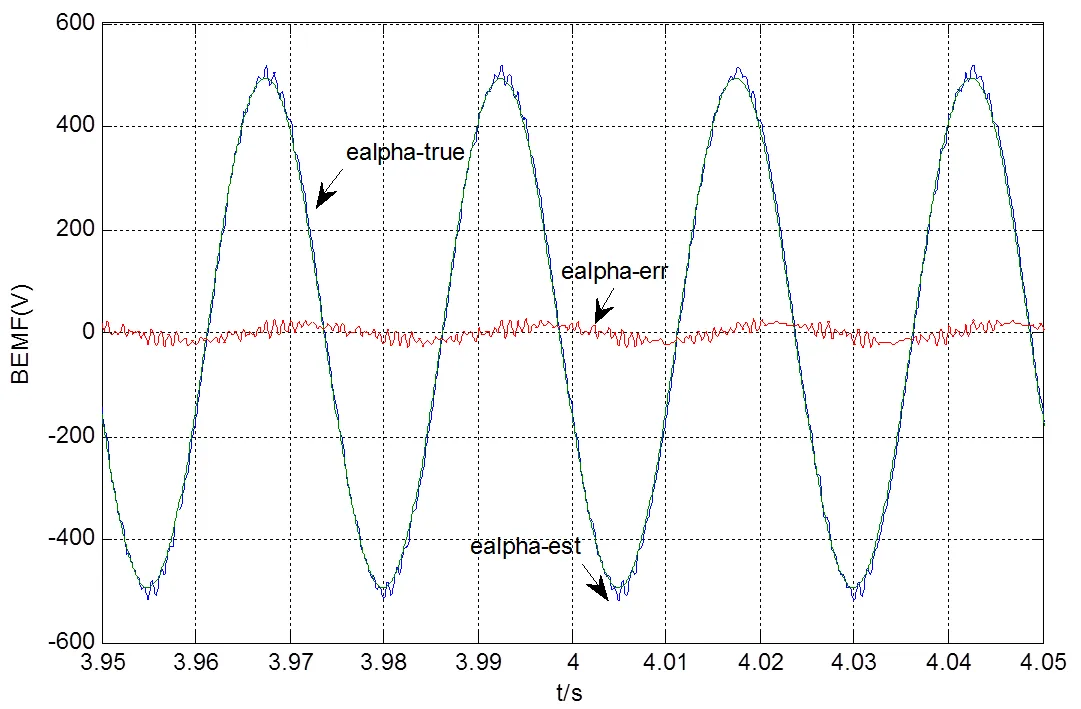
圖3 辨識有效反電動勢對比圖

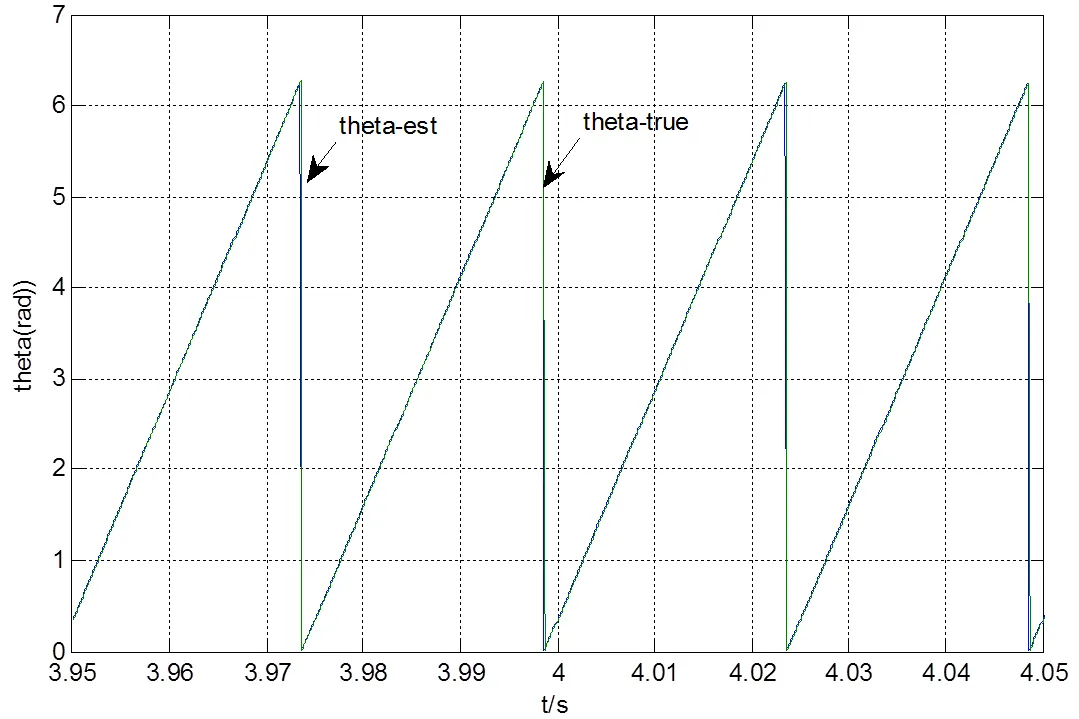
圖4 位置辨識效果示意圖圖
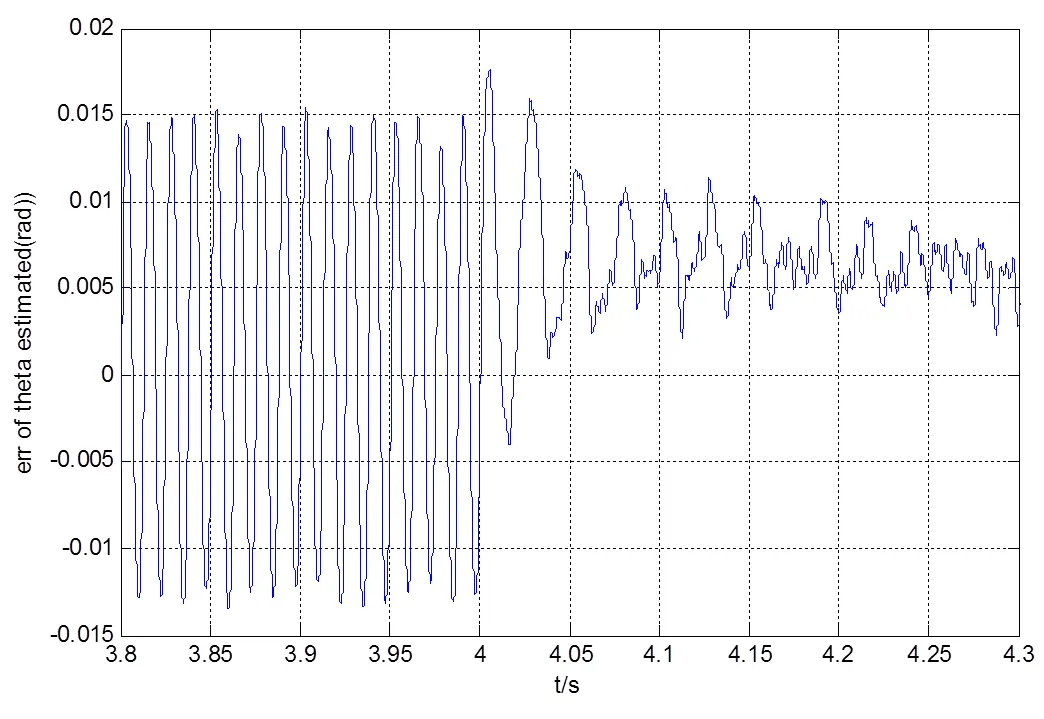
圖5 新型鎖相環(huán)位置辨識偏差對比圖
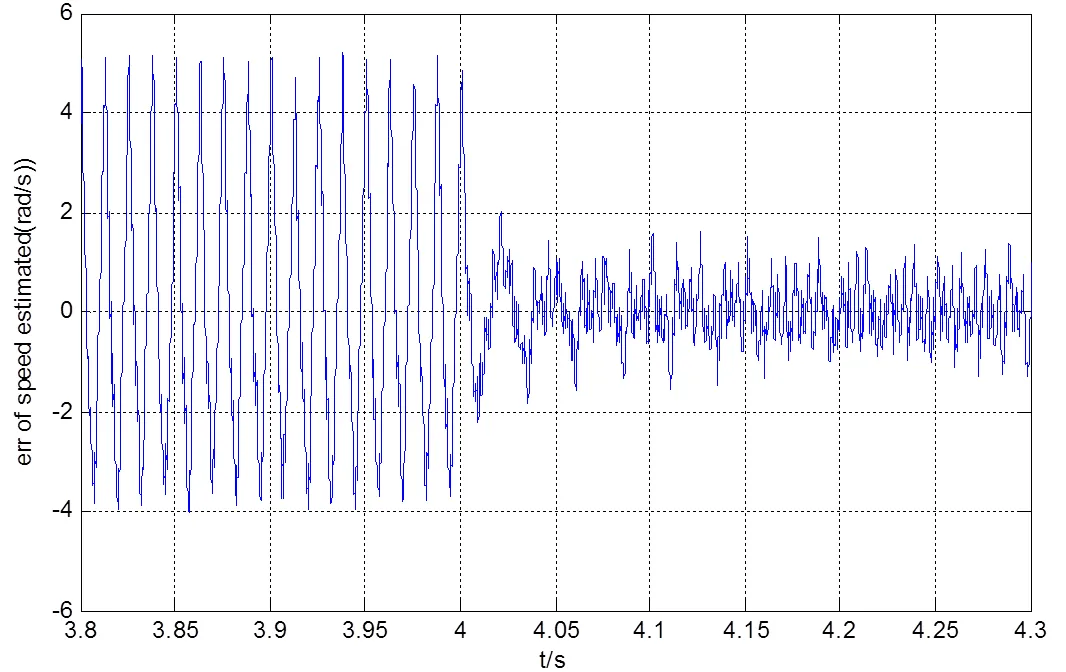
圖6 新型鎖相環(huán)轉(zhuǎn)速辨識偏差對比圖
5 結(jié)論
本文在傳統(tǒng)基于二階滑模狀態(tài)觀測器和鎖相環(huán)位置辨識算法的基礎(chǔ)上,分析了開關(guān)管死區(qū)效應(yīng)、導(dǎo)通壓降和電流采樣調(diào)理精度等逆變非理想特性對位置辨識結(jié)果的影響,進而根據(jù)陷波器原理,構(gòu)造了一種新型同步旋轉(zhuǎn)坐標系鎖相環(huán)算法,最后進行了仿真驗證。本文結(jié)果表明:
1)開關(guān)管死區(qū)效應(yīng)和導(dǎo)通壓降使得電機繞組電壓實際值和給定值之間出現(xiàn)偏差,辨識有效反電動勢中含有6+1 次諧波分量,經(jīng)過鎖相環(huán)外差法運算后,位置辨識中存在6次諧波分量;
2)電流采樣調(diào)理偏差使得辨識有效反電動勢中含有低次諧波,位置辨識中一般會出現(xiàn)2倍頻諧波分量;
3)基于陷波器的新型鎖相環(huán)技術(shù)可以削弱辨識反電動勢中諧波分量對位置辨識結(jié)果的影響。
[1] Mohammad S Islam, Iqbal Husain, Robert J Veillette, et al. Design ang performance analysis of sliding mode observers for sensorless operation of switched reluctance motors[J]. IEEE Trans. on Control systems technology, 2003, 11(3): 383-389.
[2] H. Zhongxiang, Z. Lei, et al. Rotor position estimation based on modified sliding mode observer for sensorless permanent magnet synchronous motor, 2017 IEEE Transportation Electrification Conference and Expo, Asia-Pacific (ITEC Asia-Pacific), Harbin, 2017: 1-6.
[3] 魯文其, 胡育文, 杜栩楊等. 永磁同步電機新型滑模觀測器無位置傳感器矢量控制調(diào)速系統(tǒng)[J]. 中國電機工程學(xué)報, 2010, 30(33): 78-83.
[4] Gaolin Wang, Zhuomin Li, et al. Quadrature PLL-Based High-Order Sliding Mode Observer for IPMSM Sensorless Control with Online MTPA Control Strategy, IEEE Transactions on Energy Conversion, 2013, 28(1): 214-224..
[5] 蘇健勇, 李鐵才, 楊貴杰. 基于四階混合滑模觀測器的永磁同步電機無位置傳感器控制[J]. 中國電機工程學(xué)報, 2009, 29(24): 98-103.
Rotor Position Estimation Based on Sliding Mode Observer for Marine Permanent Magnet Propulsion Motor
He Zhongxiang, Li Zhengguang, Zhu Lei
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
TM351
A
1003-4862(2019)08-0015-05
2019-2-20
何忠祥(1991-),男,工程師。研究方向:電力電子與電力傳動。E-mail:237632488@qq.com