基于無應力狀態量的平面梁節段預制構形計算方法
2019-08-31 08:21:28但啟聯秦順全魏凱鄧鵬苑仁安
土木與環境工程學報 2019年4期
但啟聯,秦順全,2,魏凱,鄧鵬,苑仁安,2
(1.西南交通大學 土木工程學院,成都 610031;2.中鐵大橋勘測設計院集團有限公司,武漢 430050)
預制節段施工方法[1-3]是將梁體分為若干節段,在工廠或工地附近制梁場預制后,在橋位處進行組拼形成橋梁的一種施工方法,該方法經濟、環保、高效,節段便于工廠化生產,質量易于控制,在現代橋梁施工中被廣泛采用。采用預制節段施工方法的關鍵是確定并精確制造出能滿足主梁線形的所有梁段。對于主梁節段預制,常用的方法有長線法[4-5]和短線法[6-9]。長線法是按設計的制梁線形制作固定曲線底座,預制節段在該固定底座上逐段生成,由于各節段間的相對幾何關系由底座曲線確定,精度易于控制。該方法對臺座穩定性和預制施工場地要求較高。短線法是在同一可調支架上逐段制造所有梁段的方法,它以已完成預制的相鄰節段一端作為端模,通過調整與端模的角度實現預制節段的線形,制造梁段的線形在與已成梁段的匹配中實現,其精度主要取決于線形的調整精度。長線法和短線法制造梁段前需準確計算主梁的制造線形,以使梁段在組拼后滿足主梁設計線形要求。
近年來,有學者基于無應力狀態控制法,對預制節段施工主梁節段制造和安裝問題展開了研究。余昆等[10]針對鋼箱梁斜拉橋懸臂拼裝施工線形控制問題,提出基于無應力狀態法理論的主梁線形控制的方法,通過主梁制造線形推算梁段間相對幾何關系,用以指導梁段的制造和安裝,使最終成橋狀態內力和線形滿足目標要求。吳運宏等[11]針對鋼箱梁斜拉橋主梁線形控制問題,提出考慮內力修正的主梁節段預制尺寸確定方法。顏東煌等[12]基于自適應無應力構形控制思想,推導了主梁節段軸線夾角及節段制造參數公式。以上方法在確定節段預制構形時,均需事先獲得主梁制造線形,由制造線形通過幾何遞推確定梁段間相對幾何關系和梁段預制參數,過程較繁瑣。
無應力狀態控制法理論[13-15]闡明了結構施工過程與最終成形狀態之間的關系,指出分階段施工橋梁控制的核心是構建單元無應力狀態量。單元無應力狀態量是結構單元本身的穩定固有量,表征了單元無應力時的幾何尺寸和形狀,將其回歸到單元預制構形確定,并用以指導節段的預制施工,具有工程實際意義。文獻[16]建立了基于平面梁單元的分階段成形結構線形控制方程,由方程可直接求解結構單元無應力狀態量。若要用單元無應力狀態量來確定單元預制構形,需首先明確二者間的對應關系。筆者通過對矩形平面梁單元變形過程分析,建立單元無應力狀態量與預制構形參數間的數學關系,并通過數值算例對關系式進行驗證。
1 平面梁節段預制構形計算理論
由有限元分析理論可知,節點位移下單元形狀和尺寸將發生改變。通過分析平面梁單元在節點位移下的變形來建立單元無應力狀態量與單元預制構形參數間的關系。對矩形平面梁單元,發生節點位移后,單元兩端面曲率和長度為
(1)
l′=l+uj-ui
(2)
式中:ui、uj分別為單元i、j端的軸向位移;vi、vj分別為單元i、j端的橫向位移;θi、θj分別為單元i、j端的轉角位移;l為單元的初始長度。
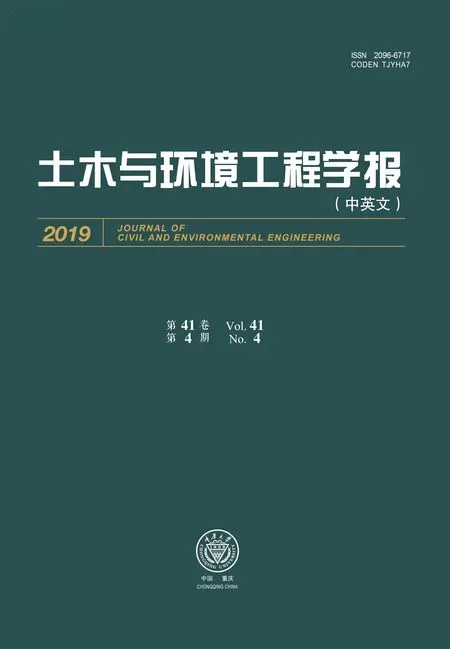
為方便分析,規定單元構形夾角為單元兩節點連線與單元端面內法線的夾角,記為θi0、θj0,并規定連線順時針轉向內法線時的夾角為正,反之為負[16]。單元構形長度為單元節點間的幾何距離,記為l0。為了方便梁段的制造,工程中常采用以直代曲的方式將曲線形梁段簡化為直線形梁段,文中單元構形均指直線形構形,但無應力狀態量仍指曲線形梁段單元對應的無應力狀態量,單元無應力構形見圖1。
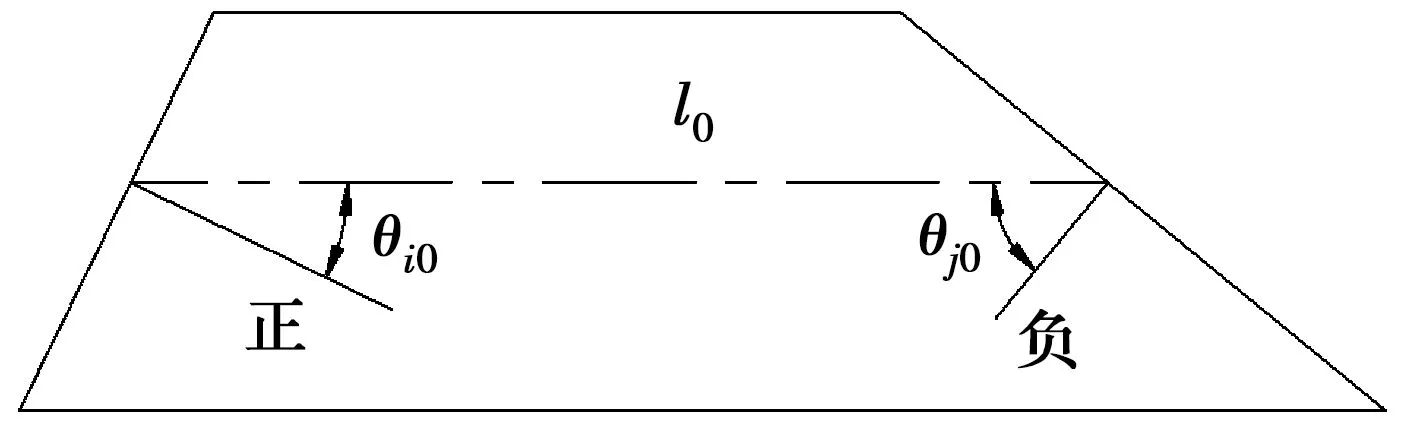
圖1 平面梁單元預制構形Fig.1 Precast configuration of plane beam
1.1 無應力曲率與預制構形夾角
在節點轉角位移或橫向位移下,平面梁單元將產生彎曲變形,分3種情況討論。
1)節點產生轉角位移
單元僅產生節點轉角位移θi、θj,無橫向位移,如圖2所示。單元兩端截面產生相對轉動,變形后單元構形夾角為
(3)
代入式(1)得變形后單元端面無應力曲率為
(4)
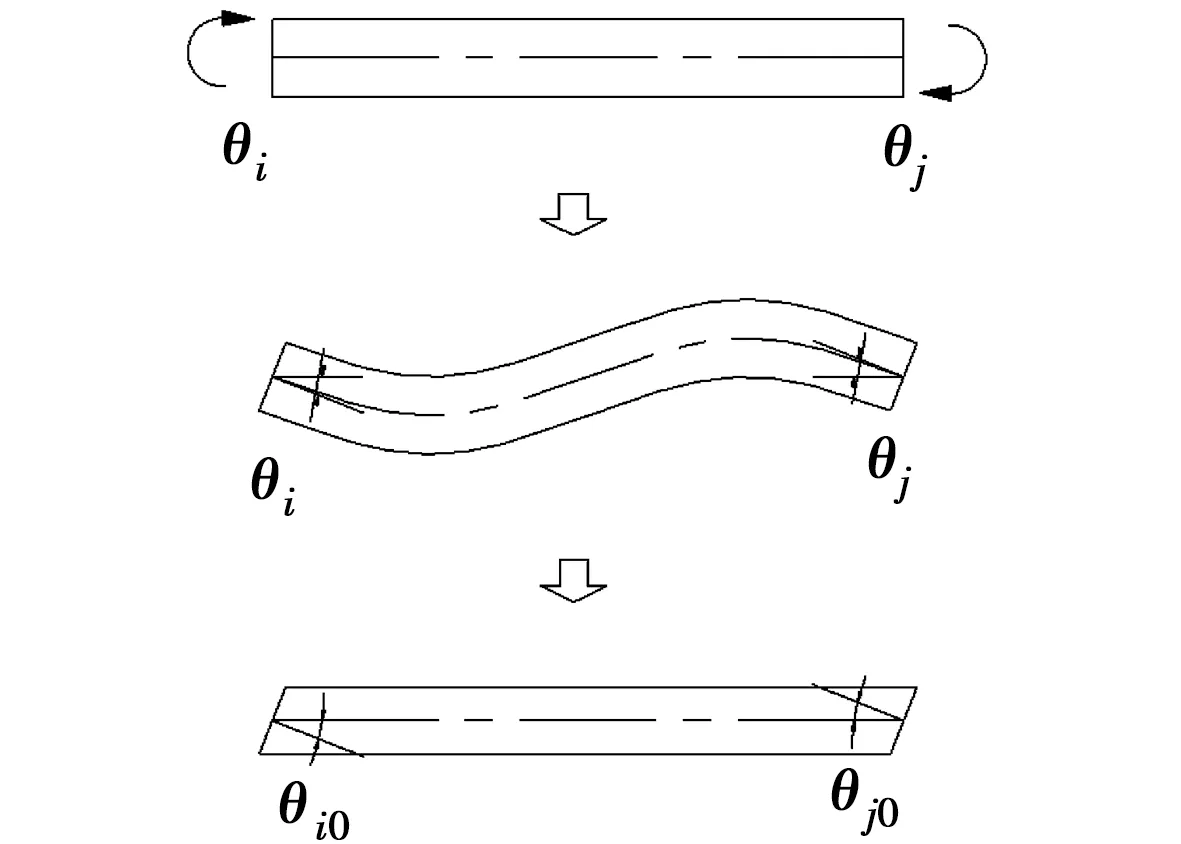
圖2 單元節點產生轉角位移Fig.2 Angular displacement occurring on the element
2)節點產生橫向位移
單元僅產生節點橫向位移vi、vj,無轉角位移,如圖3所示。單元兩端面產生相對錯動,變形后單元構形夾角為
(5)
代入式(1),考慮與式(4)形式上的統一,得變形后單元端面無應力曲率為
(6)
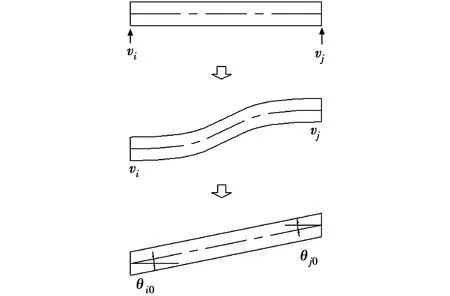
圖3 單元節點產生橫向位移Fig.3 Transverse displacement occurring on the element
3)節點產生橫向位移和轉角位移
單元同時產生節點橫向位移vi、vj和轉角位移θi、θj,如圖4所示。此時,可看作情況1)、2)的疊加,變形后單元構形夾角為
(7)
代入式(1)得變形后單元端面無應力曲率為
(8)
式(4)、式(6)、式(8)的形式一致,說明無應力曲率與單元構形夾角對應。由式(4)、式(6)、式(8)的任何一個,容易導出用端面曲率表示的構形夾角的表達式,即
(9)
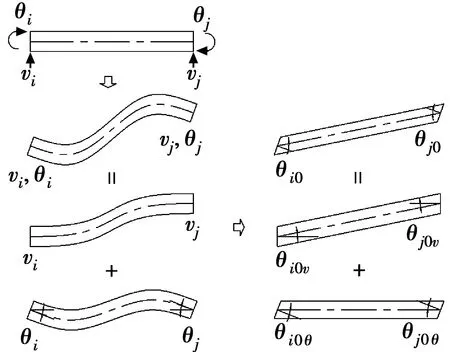
圖4 單元產生橫向位移和轉角位移Fig.4 Both of angular and transverse displacements occurring on the element
1.2 無應力長度與預制構形長度
單元僅產生節點軸向位移ui、uj,如圖5所示。單元將產生長度改變,改變量為
Δl=uj-ui
(10)
變形后單元構形長度為
l0=l+Δl
(11)
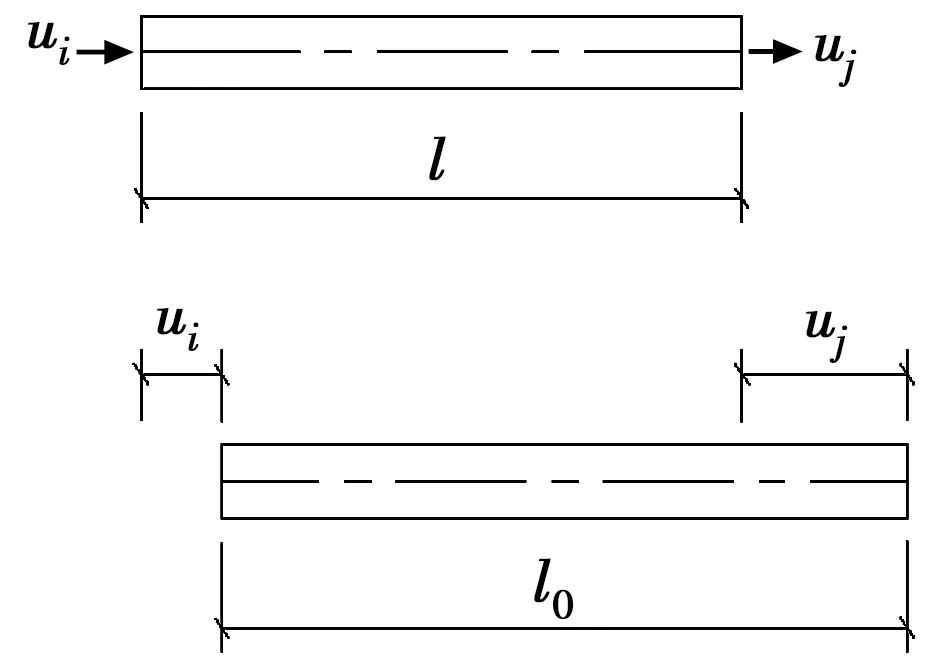
圖5 單元產生軸向位移Fig.5 Axial displacement occurring in the
上述分析表明,平面梁單元預制構形與單元無應力狀態量之間相互對應,預制構形的改變將引起單元無應力狀態量的變化,反之亦然。
1.3 節段預制構形的確定
當單元預制構形參數確定后,可用以指導預制梁段的制作。圖6所示為梁段預制構形尺寸,設構形頂、底邊長度分別為ls、lx,構形截面形心距頂、底邊的垂直距離分別為hs、hx,其余符號同前。由幾何關系可得
(12)
由式(12)可得到預制構形的制作尺寸。
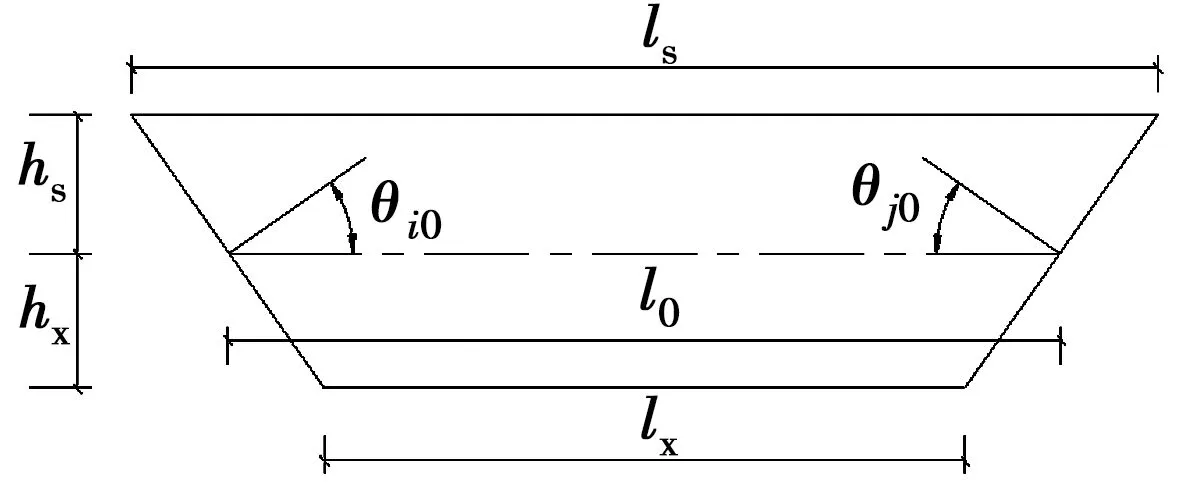
圖6 梁段預制構形尺寸Fig.6 Precast configuration size of the beam
2 算例
以圖7所示懸臂梁為例,對建立的單元無應力狀態量與預制構形間關系式進行驗證。圖中懸臂梁跨徑為30 m,梁的豎向彎曲剛度為4×107kN·m,梁上按3 m水平間距作用有10個60 kN的豎向集中荷載,要求荷載作用下主梁最終目標線形為拋物線y=x2/(2×104)。將主梁等距劃分為10個單元,將主梁目標線形節點坐標和轉角作為輸入,由文獻[16]推導的線形控制方程計算單元無應力狀態量。對于預制節段施工主梁,結構線形通常以標高(坐標)進行控制,即施工過程中和最終線形要達到預定的標高值。不同的節點輸入將計算得到不同的單元無應力狀態量,進而對應不同的單元預制構形,為說明不同預制構形對主梁目標線形實現無本質影響,以考慮節點轉角和不考慮節點轉角兩種線形(分別記為線形Ⅰ、線形Ⅱ,如圖7(b)、(c)所示)作為輸入。
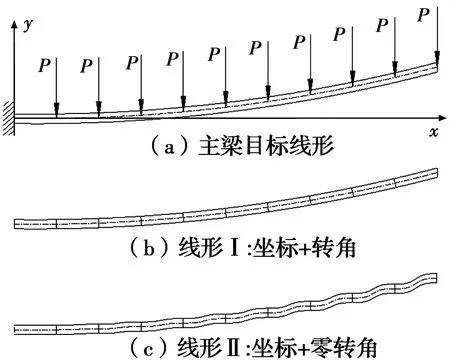
圖7 主梁線形
2.1 線形Ⅰ計算結果
通過線形控制方程計算線形Ⅰ對應的梁段單元無應力狀態量,由式(9)計算單元構形夾角,如表1所示。
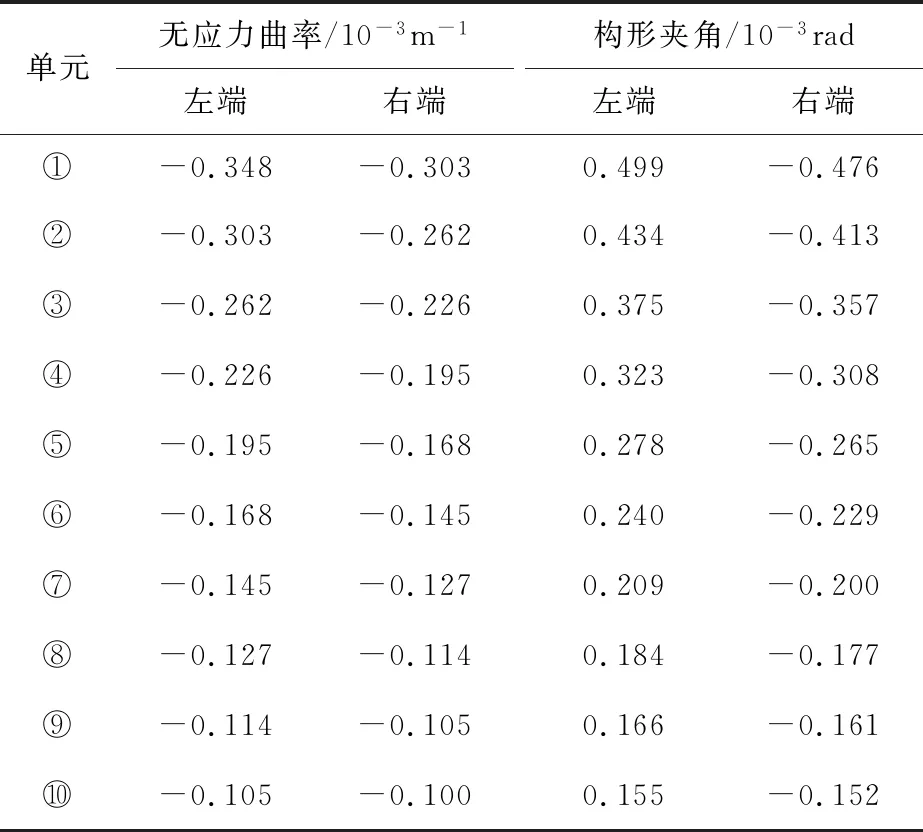
表1 線形Ⅰ無應力曲率及構形夾角Table 1 Unstressed curvature and configuration intersection angle of the alignment Ⅰ
主梁通過節段拼接形成,各預制節段間相對幾何關系是確定的[16]。如圖8所示,設第k-1(k=2,3,…,10)節段軸線與水平線間的夾角為αk-1,則第k梁段軸線與水平線間的夾角為
αk=αk-1-θj0k-1+θi0k
(13)
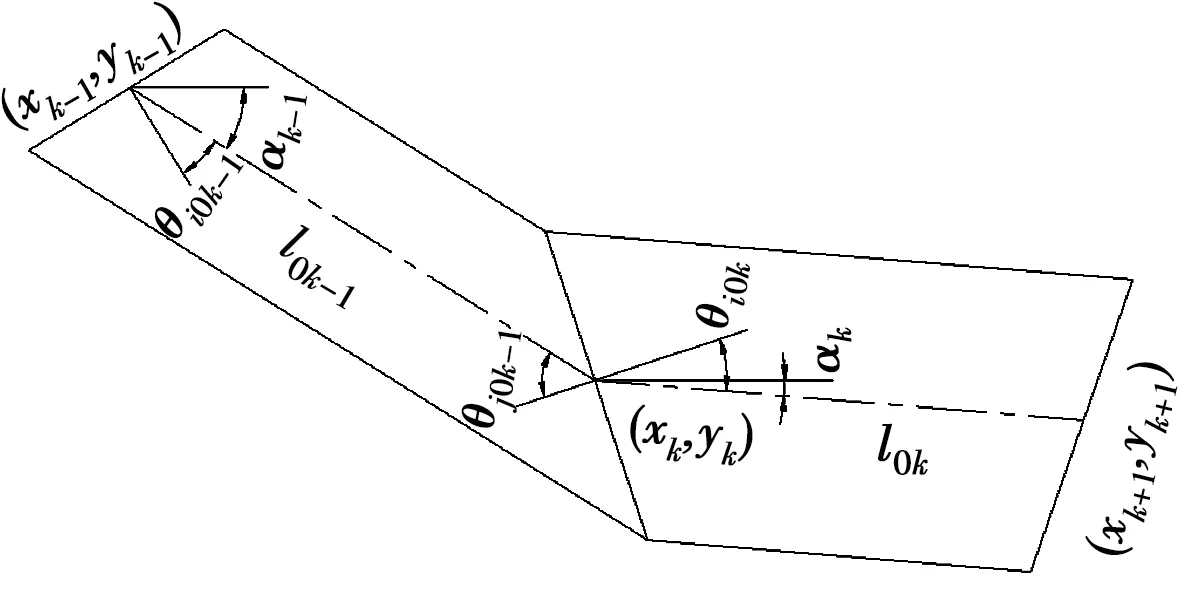
圖8 預制構形間幾何關系Fig.8 Geometrical relationship among the
設第k-1梁段始端坐標為(xk-1,yk-1),則得第k梁段始端坐標為
(14)
由式(13)、式(14)對主梁結構進行數值拼裝,得到結構預拼線形,并將結構由于荷載P產生的位移疊加至預拼線形得到結構最終成橋線形,如表2所示。由表2可知,結構最終成橋線形與目標線形一致。
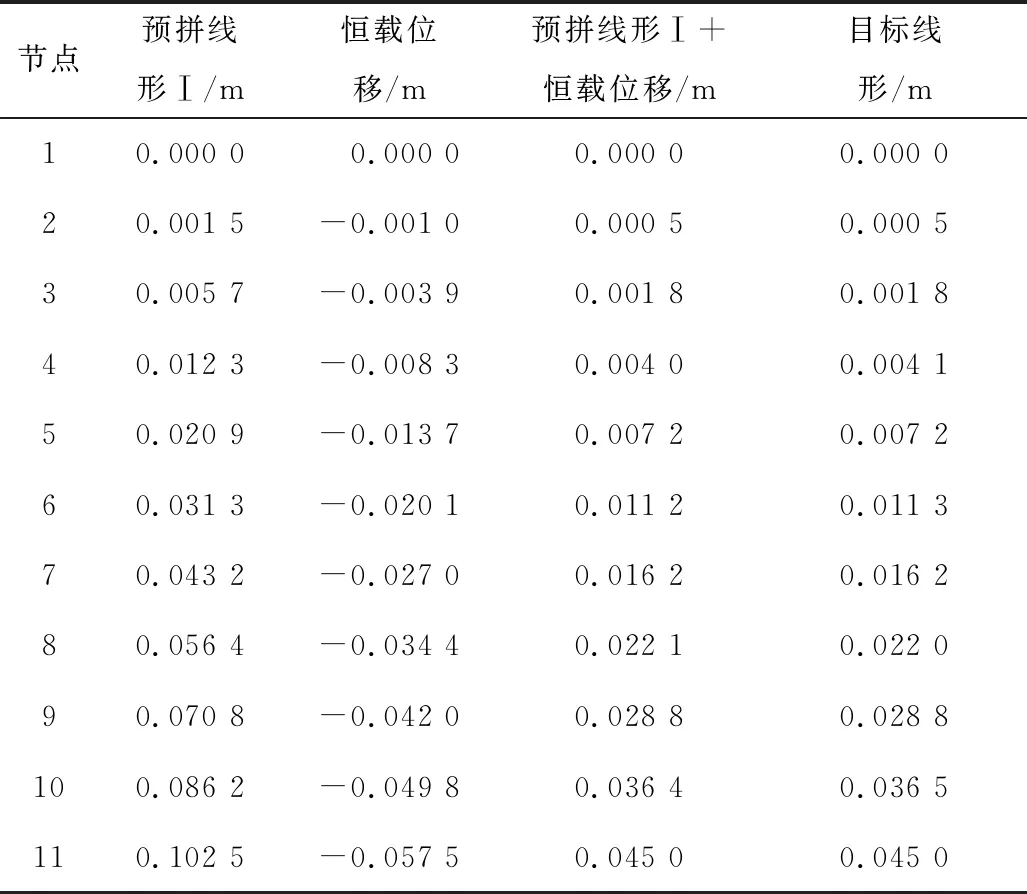
表2 線形Ⅰ拼裝驗證Table 2 Calculated assembly verification of the alignment Ⅰ
2.2 線形Ⅱ計算結果
通過線形控制方程計算得到線形Ⅱ對應的梁段單元無應力狀態量,并由式(9)得單元預制構形夾角,如表3所示。
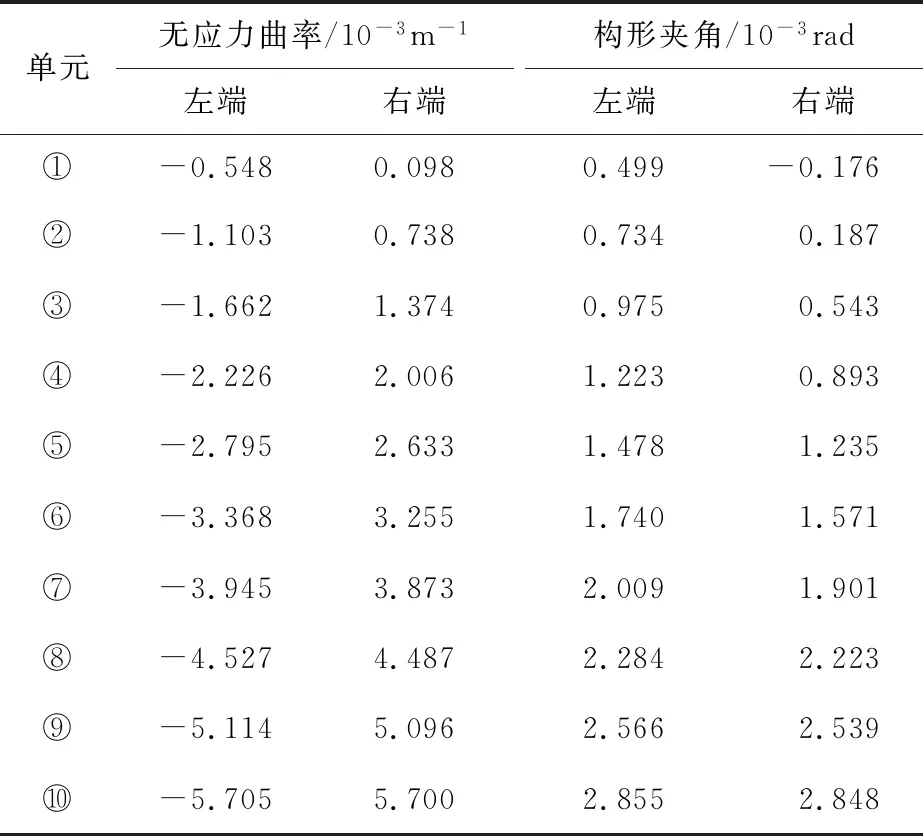
表3 線形Ⅱ無應力曲率及構形夾角Table 3 Unstressed curvature and configuration intersection angle of the alignment Ⅱ
由式(13)、式(14)對主梁結構進行數值拼裝,得到結構預拼線形,并將結構由于荷載P產生的位移疊加至預拼線形得到結構最終成橋線形,如表4所示。由表4可知,結構最終成橋線形與目標線形一致。
2.3 線形Ⅰ與線形Ⅱ結果對比
1)對比表1與表3,線形Ⅰ與線形Ⅱ求得的單元無應力曲率和預制構形均不相同。
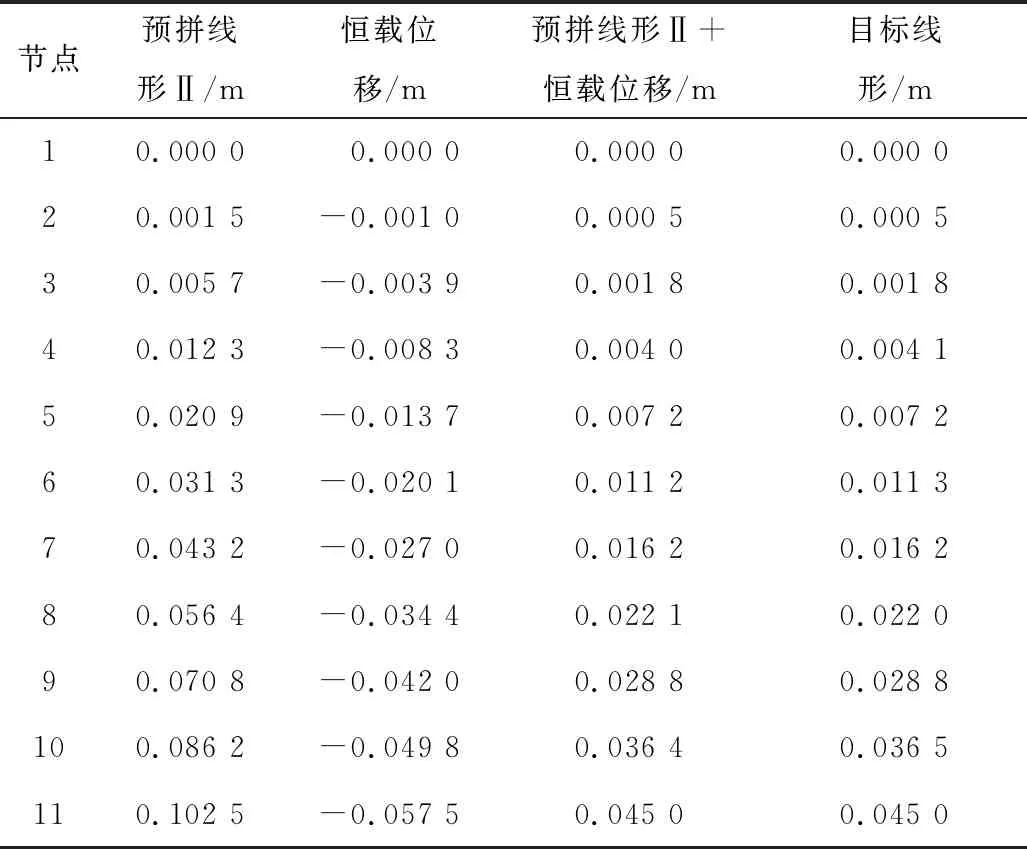
表4 線形Ⅱ拼裝驗證Table 4 Calculated assembly verification of the alignment Ⅱ
2)對比表2與表4,預拼線形Ⅰ與預拼線形Ⅱ一致,最終成橋線形Ⅰ與最終成橋線形Ⅱ節點坐標相等,且都與目標線形節點坐標一致,說明建立的無應力狀態量與預制構形間的關系正確。
3)線形Ⅰ對目標線形上每個點的線形均滿足要求,線形Ⅱ僅在節點上滿足目標線形坐標要求,在節點間與目標線形不同。由于工程中常將節點間梁段簡化為直線梁段,只要保證節點上線形滿足要求即可,所以兩種形式均可以滿足工程要求。
3 結論
建立了平面梁單元無應力狀態量與單元預制構形間的數學關系,并以懸臂梁為例對關系式進行驗證,結果表明:
1)單元無應力狀態量與單元預制構形間相互對應,不同的單元無應力狀態量對應不同的單元預制構形;反之,不同的單元預制構形對應不同的單元無應力狀態量。
2)數值計算結果表明,兩種輸入線形計算得到的最終成橋線形與目標線形一致,說明建立的平面梁單元無應力狀態量與單元預制構形參數間的關系正確。
3)兩種輸入線形得到的單元預制構形不相同,但二者均能實現對主梁節點標高的控制,表明預制構形的差異對主梁標高控制無本質影響。對實際工程而言,只要確保節點標高滿足目標線形標高控制要求,梁段的預制構形可不同。
4)梁段預制構形確定的一般步驟為:由線形控制方程計算目標線形對應的單元無應力狀態量,再根據單元無應力狀態量與無應力構形間的關系計算節段預制構形夾角及軸線長度,進而得到預制構形制造參數。