基于模糊邏輯的電力推進(jìn)船舶電力負(fù)荷預(yù)測(cè)
2019-09-02 10:53:12陳思良
船舶標(biāo)準(zhǔn)化工程師 2019年6期
鄭 高,陳思良
(1.武警海警學(xué)院 機(jī)電管理系,浙江寧波 315801;2.廣東海警支隊(duì) 陽江大隊(duì),廣東陽江 529600)
0 引言
船舶電力推進(jìn)是指以電力為動(dòng)力,通過電動(dòng)機(jī)驅(qū)動(dòng)螺旋槳,從而推進(jìn)船舶運(yùn)行的一種推進(jìn)形式。電力推進(jìn)裝置具有占用空間少、易于布置、機(jī)動(dòng)性好、噪聲低、振動(dòng)小、經(jīng)濟(jì)性高等優(yōu)點(diǎn),具有良好的應(yīng)用前景[1]。在船舶電力推進(jìn)系統(tǒng)中,控制技術(shù)是重點(diǎn)和難點(diǎn),電力負(fù)荷預(yù)測(cè)是其基礎(chǔ)工作之一。電力負(fù)荷預(yù)測(cè)是否準(zhǔn)確,極大地影響著電力推進(jìn)船舶的穩(wěn)定性和經(jīng)濟(jì)性,而電力負(fù)荷的波動(dòng)具有強(qiáng)隨機(jī)性和非線性,對(duì)其進(jìn)行準(zhǔn)確預(yù)測(cè)的難度很大。
與傳統(tǒng)技術(shù)不同,模糊邏輯在控制或處理對(duì)象時(shí),無需精確的數(shù)學(xué)模型,而是依賴于現(xiàn)場(chǎng)工作人員長(zhǎng)期累積的經(jīng)驗(yàn),或是領(lǐng)域?qū)<一诳煽恐R(shí)所提出的模糊規(guī)則,適用于復(fù)雜非線性對(duì)象[2]。基于模糊集合建立的模糊系統(tǒng),具有模仿人類思維進(jìn)行模糊推理的功能,是理想的萬能逼近器,可以無限逼近任一非線性函數(shù)[3]。模糊邏輯是處理電力推進(jìn)船舶電力負(fù)荷數(shù)據(jù)隨機(jī)性和非線性的有效方法。本文設(shè)計(jì)了一個(gè)非單值Mamdani模糊模型,用于某型電力推進(jìn)船舶實(shí)際電力負(fù)荷時(shí)間序列的預(yù)測(cè),并通過MATLAB仿真來檢驗(yàn)其預(yù)測(cè)性能。
1 船舶電力推進(jìn)系統(tǒng)
船舶電力推進(jìn)系統(tǒng)主要由原動(dòng)機(jī)、發(fā)電機(jī)、配電裝置、變壓器、變頻裝置、控制系統(tǒng)、電動(dòng)機(jī)、螺旋槳等部分組成[4]。原動(dòng)機(jī)消耗燃料而產(chǎn)生原動(dòng)力,為發(fā)電機(jī)提供機(jī)械能。目前,在船舶電力推進(jìn)系統(tǒng)中,原動(dòng)機(jī)一般選用中、高速柴油機(jī);當(dāng)需要更大的電力或輸出功率時(shí),則采用燃?xì)廨啓C(jī)。發(fā)電機(jī)將原動(dòng)機(jī)提供的機(jī)械能轉(zhuǎn)換為電能,與原動(dòng)機(jī)、配電板共同組成船舶發(fā)電機(jī)組,向全船用電設(shè)備供電。配電裝置集中控制、分配發(fā)電機(jī)所發(fā)出的電能,供給每臺(tái)用電設(shè)備。變壓器一般由初級(jí)線圈、次級(jí)線圈以及鐵芯組成;當(dāng)初級(jí)線圈接入交流電時(shí),根據(jù)電磁感應(yīng)原理,在次級(jí)線圈中會(huì)感應(yīng)出同頻但不同電壓的交流電。
在船舶電力推進(jìn)系統(tǒng)當(dāng)中,交流推進(jìn)電動(dòng)機(jī)轉(zhuǎn)速的變化需要通過改變頻率來實(shí)現(xiàn),因此變頻裝置在船舶電力推進(jìn)系統(tǒng)中起著至關(guān)重要的作用。控制系統(tǒng)則負(fù)責(zé)監(jiān)測(cè)各機(jī)電設(shè)備的運(yùn)行狀態(tài),采集其運(yùn)行數(shù)據(jù),分析故障趨勢(shì),并根據(jù)傳感器所測(cè)的參數(shù),完成執(zhí)行機(jī)構(gòu)的正確操作。推進(jìn)電動(dòng)機(jī)與螺旋槳直接連接,帶動(dòng)螺旋槳轉(zhuǎn)動(dòng),為船舶提供運(yùn)行動(dòng)力。螺旋槳俗稱“車葉”,將電動(dòng)機(jī)產(chǎn)生的機(jī)械能轉(zhuǎn)變?yōu)橥七M(jìn)力,推進(jìn)船舶前進(jìn)或后退。
2 船舶電力負(fù)荷預(yù)測(cè)方法
準(zhǔn)確的電力負(fù)荷預(yù)測(cè)是保證船舶電力推進(jìn)系統(tǒng)有效、可靠運(yùn)行的基礎(chǔ)。短期船舶電力負(fù)荷預(yù)測(cè)是指相對(duì)短時(shí)間段內(nèi)(一般是1 h或1 h以內(nèi))的電力負(fù)荷預(yù)測(cè),得出的預(yù)測(cè)值更加接近船舶電力系統(tǒng)運(yùn)行的實(shí)時(shí)數(shù)據(jù)[5]。目前用于電力推進(jìn)船舶電力負(fù)荷預(yù)測(cè)的方法有2類,一類是傳統(tǒng)預(yù)測(cè)方法,時(shí)間序列預(yù)測(cè)法是其中常用的一種[5];另一類是人工智能預(yù)測(cè)方法,模糊邏輯是其中具有代表性的一種方法。
2.1 時(shí)間序列預(yù)測(cè)法
時(shí)間序列預(yù)測(cè)法將電力負(fù)荷數(shù)據(jù)按照時(shí)間先后順序排列成數(shù)列進(jìn)行研究和分析,根據(jù)其發(fā)展過程、方向和趨勢(shì),進(jìn)行延伸或類推,用當(dāng)前若干個(gè)數(shù)據(jù)預(yù)測(cè)下一段時(shí)間可能達(dá)到的水平[6]。
2.2 模糊邏輯預(yù)測(cè)法
上個(gè)世紀(jì)60年代,畢業(yè)于美國哥倫比亞大學(xué)的自動(dòng)控制專家Zadeh教授創(chuàng)立了模糊集合理論,開啟了模糊邏輯理論研究的先河[2]。經(jīng)過幾十年的發(fā)展,模糊邏輯理論日趨成熟,其應(yīng)用也日益廣泛。在電力推進(jìn)船舶中,許多影響電力負(fù)荷波動(dòng)的因素?zé)o法用確切的數(shù)學(xué)模型進(jìn)行表達(dá)。基于推理邏輯與語言規(guī)則的模糊系統(tǒng),可以表達(dá)一個(gè)復(fù)雜的非線性函數(shù),適用于電負(fù)荷預(yù)測(cè)[7]。
設(shè)計(jì)電力推進(jìn)船舶電力負(fù)荷模糊預(yù)測(cè)模型通常有以下2種途徑[8]:
1)利用人們長(zhǎng)時(shí)間學(xué)習(xí)、實(shí)驗(yàn)所積累的大量經(jīng)驗(yàn),或通過大量輸入/輸出數(shù)據(jù)建立模糊規(guī)則庫,選擇合適的模糊器、解模糊器和模糊推理機(jī),構(gòu)造出一個(gè)完整的模糊系統(tǒng)。但由于人們所得出的經(jīng)驗(yàn)具有一定的局限性,可能會(huì)導(dǎo)致所建立的模糊規(guī)則不夠完備,隸屬度函數(shù)不夠準(zhǔn)確,不能很好地應(yīng)對(duì)被預(yù)測(cè)對(duì)象的不確定性與非線性性,從而影響了預(yù)測(cè)精度。
2)確定模糊系統(tǒng)的結(jié)構(gòu),允許模糊系統(tǒng)中的參數(shù)變化,再根據(jù)所獲取的輸入/輸出數(shù)據(jù),通過自學(xué)習(xí)方法來確定這些參數(shù),這也是本文所采用的方法。
3 非單值Mamdani模糊預(yù)測(cè)模型
3.1 模型設(shè)計(jì)
一個(gè)完備的模糊系統(tǒng)由規(guī)則庫、模糊器、推理機(jī)以及解模糊器4部分組成[8]。本文設(shè)計(jì)的電力推進(jìn)船舶電力負(fù)荷模糊預(yù)測(cè)模型為Mamdani型,模糊規(guī)則形式如式(1)。模型有3個(gè)輸入、1個(gè)輸出,每個(gè)輸入論域含有3個(gè)模糊集合,則模糊規(guī)則庫共含有27(3×3×3)條模糊規(guī)則。

式中:l為模糊規(guī)則序數(shù),l=1,2,...,27;i為輸入序數(shù),i=1,2,3;為模糊規(guī)則前件模糊集合;Bl為模糊規(guī)則后件模糊集合。
采用高斯模糊器,輸入精確量被模糊化,如式(2),如圖1所示。

利用反向傳播算法來訓(xùn)練待定參數(shù)。
3.2 預(yù)測(cè)結(jié)果
以某型電力推進(jìn)船舶的實(shí)際電力負(fù)荷數(shù)據(jù)為研究對(duì)象。取其以1 h為間隔的用電量,共12天含288個(gè)數(shù)據(jù)。前10天的數(shù)據(jù)共有240個(gè),用于訓(xùn)練參數(shù);后2天的數(shù)據(jù)共有48個(gè),用于檢驗(yàn)?zāi)P偷念A(yù)測(cè)性能。
模型的預(yù)測(cè)精度用式(6)所示的平均相對(duì)誤差絕對(duì)值來衡量。
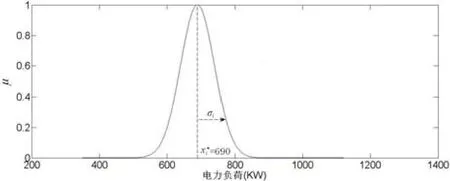
圖1 輸入模糊集合
模糊規(guī)則前件集合的隸屬度函數(shù)如式(3),如圖2所示。

式中:yot為電力負(fù)荷模糊預(yù)測(cè)模型的預(yù)測(cè)值;st為電力負(fù)荷的實(shí)際值。
預(yù)測(cè)結(jié)果如圖3所示。

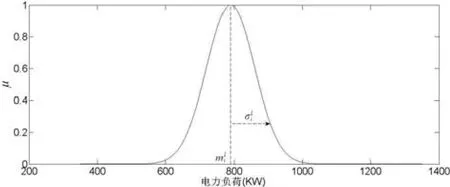
圖2 模糊規(guī)則前件模糊集合
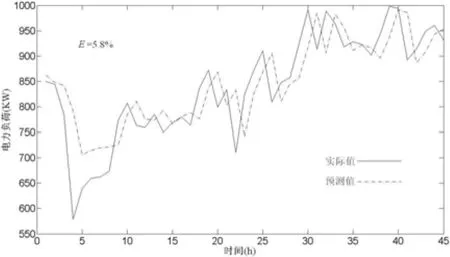
圖3 預(yù)測(cè)結(jié)果
模糊規(guī)則后件集合的隸屬度函數(shù)為高斯函數(shù),由于采用中心平均解模糊器,故可將其用中心yl來代替。
采用乘積模糊推理機(jī),系統(tǒng)輸出如式(4)。

式中:M表示模糊規(guī)則的個(gè)數(shù),M=27;為模糊規(guī)則后件集合的隸屬度函數(shù)的中心;ωl為模糊規(guī)則的激活度,如式(5)。
式中:μXi(xi)為輸入模糊集合的隸屬度函數(shù);
從預(yù)測(cè)結(jié)果可以看出,在區(qū)間[2,8]內(nèi)電力負(fù)荷的波動(dòng)較大、非線性較強(qiáng),因而預(yù)測(cè)誤差稍大;在其它區(qū)間內(nèi),預(yù)測(cè)曲線能夠較好的跟蹤實(shí)際曲線的趨勢(shì)與走向。預(yù)測(cè)誤差為5.8%,說明模型具有良好的預(yù)測(cè)性能。
4 結(jié)論
隨著智能化、信息化、自動(dòng)化時(shí)代的到來,電力負(fù)荷預(yù)測(cè)技術(shù)也逐步完善。與其它人工智能方法相結(jié)合,能夠大大提高模糊系統(tǒng)的逼近精度。本文簡(jiǎn)單回顧了船舶電力推進(jìn)系統(tǒng)與船舶電力負(fù)荷預(yù)測(cè)方法的基本理論,并以某型電力推進(jìn)船舶(1 h)的實(shí)際電力負(fù)荷時(shí)間序列為研究對(duì)象,建立了一個(gè)非單值Mamdani模糊預(yù)測(cè)模型,以提高預(yù)測(cè)精度。
MATLAB仿真結(jié)果表明,該模型的預(yù)測(cè)誤差較低,具有良好的預(yù)測(cè)性能。將本文所述的綜合算法應(yīng)用于電力推進(jìn)船舶電力負(fù)荷的預(yù)測(cè),定能取得更好的預(yù)測(cè)效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
小獼猴智力畫刊(2022年3期)2022-03-29 01:09:42
船舶(2021年4期)2021-09-07 17:32:22
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學(xué)報(bào)(哲學(xué)社會(huì)科學(xué)版)(2016年9期)2017-01-15 13:52:02
