黑麋峰抽水蓄能電站機(jī)組振擺保護(hù)邏輯優(yōu)化
2019-09-02 02:26:40陳福球陳玉嬌
水電站機(jī)電技術(shù) 2019年8期
關(guān)鍵詞:振動(dòng)
陳福球,湯 巍,陳玉嬌
(湖南黑麋峰抽水蓄能有限公司,湖南 長(zhǎng)沙410213)
1 設(shè)備現(xiàn)狀
1.1 系統(tǒng)簡(jiǎn)介
黑麋峰公司機(jī)組振擺在線(xiàn)監(jiān)測(cè)系統(tǒng)由上位機(jī)與下位機(jī)兩部分組成,制造廠(chǎng)家均為南京南瑞集團(tuán)。每臺(tái)機(jī)組安裝1套下位機(jī)即現(xiàn)地振擺監(jiān)測(cè)裝置,下位機(jī)系統(tǒng)主要包括:現(xiàn)地預(yù)處理機(jī)SJ90B、傳感器、交直流逆變電源系統(tǒng)、觸摸顯示屏,主要功能為實(shí)時(shí)處理、顯示傳感器過(guò)來(lái)的振擺數(shù)據(jù),經(jīng)分析處理后送往上位機(jī),并通過(guò)邏輯判斷,出口振擺報(bào)警、跳機(jī)信號(hào)等。振擺監(jiān)測(cè)系統(tǒng)上位機(jī)共安裝1套,型號(hào)為SSJ-9000,主要包括:WEB服務(wù)器(及軟件)、數(shù)據(jù)庫(kù)服務(wù)器(及軟件)、狀態(tài)監(jiān)測(cè)分析軟件、報(bào)告編制系統(tǒng)、交直流逆變電源系統(tǒng)、觸摸顯示屏、交換機(jī)、安全防護(hù)裝置,主要功能為數(shù)據(jù)存儲(chǔ)與分析、報(bào)表統(tǒng)計(jì)、圖譜分析、事故追憶等。
1.2 現(xiàn)地振擺監(jiān)測(cè)裝置測(cè)點(diǎn)
黑麋峰公司機(jī)組振擺在線(xiàn)監(jiān)測(cè)系統(tǒng)每臺(tái)機(jī)組配置21個(gè)測(cè)點(diǎn),分別為振動(dòng)10個(gè),擺度6個(gè),鍵相1個(gè),大軸位移3個(gè),壓力脈動(dòng)1個(gè)。機(jī)組傳感器測(cè)點(diǎn)見(jiàn)表1。
現(xiàn)地振擺監(jiān)測(cè)裝置測(cè)點(diǎn)除現(xiàn)地傳感器過(guò)來(lái)的模擬量外,還有從監(jiān)控系統(tǒng)輸入的通信量,如表2所示。
1.3 機(jī)組振擺數(shù)據(jù)統(tǒng)計(jì)及主要問(wèn)題
1.3.1 機(jī)組振擺數(shù)據(jù)統(tǒng)計(jì)
2015年6、7 、8月份機(jī)組振擺數(shù)據(jù)統(tǒng)計(jì)如表3、表4、表5所示。

表1 機(jī)組傳感器測(cè)點(diǎn)清單表
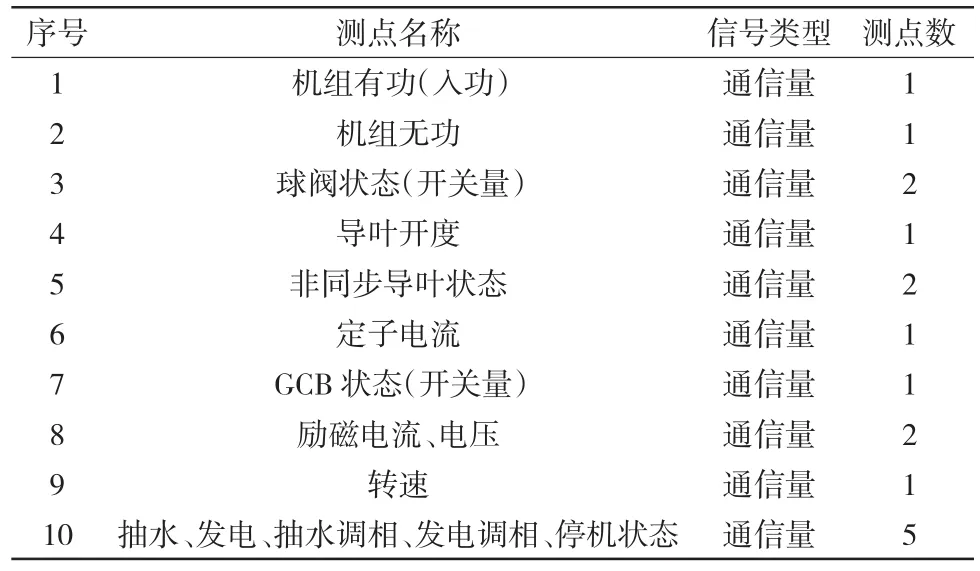
表2 監(jiān)控送至機(jī)組狀態(tài)在線(xiàn)監(jiān)測(cè)裝置點(diǎn)表

表3 2015年6月份機(jī)組振擺數(shù)據(jù) 單位:μm
1.3.2 國(guó)標(biāo)中關(guān)于振動(dòng)、擺度數(shù)據(jù)的評(píng)價(jià)標(biāo)準(zhǔn)
GB/T 11348.5-2008旋轉(zhuǎn)機(jī)械轉(zhuǎn)軸徑向振動(dòng)的測(cè)量和評(píng)定第5部分:水力發(fā)電廠(chǎng)和泵站機(jī)組,該標(biāo)準(zhǔn)將水輪發(fā)電機(jī)組在穩(wěn)態(tài)運(yùn)行時(shí)的轉(zhuǎn)軸相對(duì)振動(dòng)劃分成兩個(gè)主要范圍:
1)大區(qū)A-B:振動(dòng)值在此大區(qū)內(nèi)的機(jī)組可以長(zhǎng)期運(yùn)行;
2)大區(qū)C-D:振動(dòng)值在此大區(qū)內(nèi)的機(jī)組具有較高的振幅,必須考慮機(jī)組具體的設(shè)計(jì)和運(yùn)行條件,判斷振動(dòng)值是否允許長(zhǎng)期連續(xù)運(yùn)行。
按照標(biāo)準(zhǔn)要求報(bào)警值推薦設(shè)置大區(qū)A-B上限的1.25倍。一般報(bào)警后,機(jī)組還可以繼續(xù)運(yùn)行一段時(shí)間,以便查明振動(dòng)改變的原因并確定補(bǔ)救措施。黑麋峰公司機(jī)組轉(zhuǎn)速為300r/min,按照該標(biāo)準(zhǔn)黑麋峰水輪發(fā)電機(jī)組在穩(wěn)態(tài)運(yùn)行時(shí)的軸系擺度大區(qū)A-B的上限為242μm。

表4 2015年7月份機(jī)組振擺數(shù)據(jù) 單位:μm
因此,根據(jù)國(guó)家標(biāo)準(zhǔn),黑麋峰機(jī)組擺度運(yùn)行值不得大于大區(qū)A-B上限的1.25倍即302μm。
(2)機(jī)組振動(dòng)評(píng)價(jià)標(biāo)準(zhǔn)
花樣游泳所展現(xiàn)的技巧和美感,大致上和花樣滑冰、自由體操及芭蕾舞相同。但是花樣游泳的多數(shù)動(dòng)作,是在水中腳上頭下進(jìn)行的,有時(shí)一個(gè)動(dòng)作需屏氣達(dá)五十秒之久,就力度和動(dòng)作控制來(lái)說(shuō),難度遠(yuǎn)比花樣滑冰等還大一些。
1)頂蓋振動(dòng)
GB/T 15468-2006水輪機(jī)基本技術(shù)條件規(guī)定,額定轉(zhuǎn)速在250~375r/min,其頂蓋水平振動(dòng)小于50μm;頂蓋垂直振動(dòng)小于60μm。

表5 2015年8月份機(jī)組振擺數(shù)據(jù) 單位:μm
根據(jù)國(guó)家標(biāo)準(zhǔn),黑麋峰公司機(jī)組頂蓋運(yùn)行報(bào)警值:水平振動(dòng)50μm;垂直振動(dòng)60μm。
2)機(jī)架、定子鐵心振動(dòng)
GB/T 8564-2003水輪發(fā)電機(jī)組安裝技術(shù)規(guī)范規(guī)定機(jī)組穩(wěn)定運(yùn)行范圍內(nèi),額定轉(zhuǎn)速在250~375r/min,帶推力軸承支架的垂直振動(dòng)小于50μm;帶導(dǎo)軸承支架的水平振動(dòng)小于70μm;定子鐵心部位機(jī)座水平振動(dòng)小于20μm;定子鐵心振動(dòng)(100Hz的允許雙振幅值)不大于30μm。
根據(jù)國(guó)家標(biāo)準(zhǔn),黑麋峰公司機(jī)組機(jī)架運(yùn)行報(bào)警值:垂直振動(dòng)50μm,水平振動(dòng)70μm;定子基座運(yùn)行報(bào)警值:水平振動(dòng)20μm;定子鐵心運(yùn)行報(bào)警值:100Hz的允許雙幅振動(dòng)值不大于30μm。
根據(jù)國(guó)家標(biāo)準(zhǔn),綜合分析得出黑麋峰公司機(jī)組穩(wěn)定性限值如表6所示。
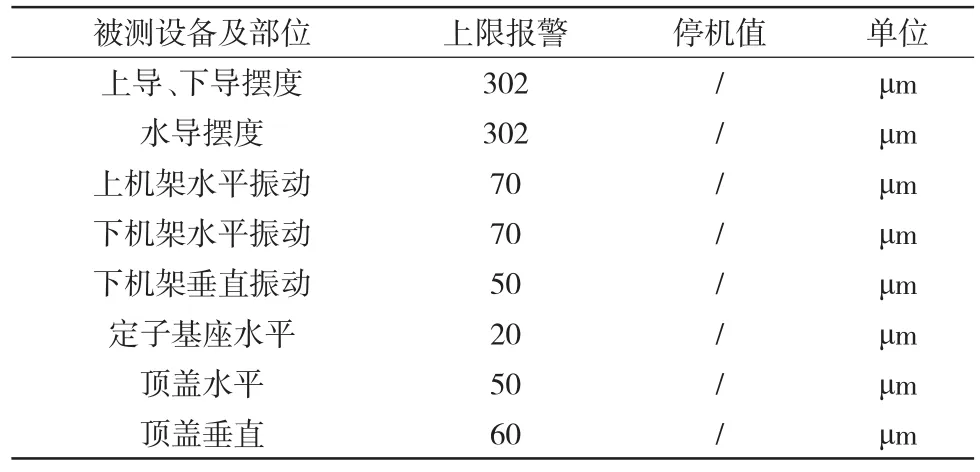
表6 黑麋峰公司機(jī)組運(yùn)行參數(shù)限值
1.3.3 振擺數(shù)據(jù)存在問(wèn)題分析
(1)大軸擺度數(shù)據(jù)分析
據(jù)數(shù)據(jù)統(tǒng)計(jì)分析,黑麋峰公司機(jī)組大軸擺度基本符合機(jī)組運(yùn)行限制要求,變化趨勢(shì)穩(wěn)定,未見(jiàn)明顯異常。
(2)機(jī)組振動(dòng)數(shù)據(jù)分析
1)4臺(tái)機(jī)組頂蓋振動(dòng)普遍超過(guò)國(guó)家標(biāo)準(zhǔn)限值50μm,且幅值超出標(biāo)準(zhǔn)好幾倍,機(jī)組穩(wěn)態(tài)運(yùn)行時(shí),4臺(tái)機(jī)組頂蓋振動(dòng)值在100~300μm間浮動(dòng),偶爾跳動(dòng)至350μm左右。其他部位振動(dòng)數(shù)值基本符合國(guó)標(biāo)要求。
2)振動(dòng)探頭采用的是國(guó)產(chǎn)精信品牌,產(chǎn)品質(zhì)量一般,穩(wěn)定性不高,3號(hào)機(jī)組2015年檢修時(shí),對(duì)振動(dòng)探頭進(jìn)行送檢時(shí)發(fā)現(xiàn)有5個(gè)探頭故障,由于振動(dòng)探頭可靠性低的原因,故統(tǒng)計(jì)的振動(dòng)數(shù)據(jù)可能與實(shí)際存在一定偏差。
1.3.4 當(dāng)前振擺告警、保護(hù)動(dòng)作邏輯
每臺(tái)機(jī)組現(xiàn)地振擺監(jiān)測(cè)裝置設(shè)置一級(jí)報(bào)警與二級(jí)報(bào)警,均為開(kāi)關(guān)量送往監(jiān)控系統(tǒng),一級(jí)報(bào)警作用于告警,二級(jí)報(bào)警通過(guò)裝置內(nèi)部邏輯判斷后出口機(jī)組跳機(jī)信號(hào),作用于停機(jī)。目前機(jī)組振擺保護(hù)尚未投入,故一級(jí)與二級(jí)報(bào)警值設(shè)置均較寬松,一級(jí)報(bào)警值為300μm,二級(jí)報(bào)警值為1000μm。
一級(jí)報(bào)警邏輯為單點(diǎn)延時(shí)告警,即任意一個(gè)振擺監(jiān)測(cè)點(diǎn)數(shù)值超過(guò)300μm后,延時(shí)60s發(fā)告警信號(hào),二級(jí)報(bào)警通過(guò)內(nèi)部邏輯組態(tài),然后延時(shí)輸出跳機(jī)信號(hào),且目前一級(jí)、二級(jí)報(bào)警只在停機(jī)、發(fā)電、抽水、發(fā)電調(diào)相、抽水調(diào)相這5個(gè)穩(wěn)態(tài)激活,其他過(guò)渡工況不觸發(fā)報(bào)警。二級(jí)報(bào)警邏輯組態(tài)流程見(jiàn)圖1~3。
圖2為抽水工況報(bào)警流程,其他4個(gè)穩(wěn)態(tài)與抽水工況流程一樣,即判斷19個(gè)振擺監(jiān)測(cè)點(diǎn)。
如圖3所示,當(dāng)前二級(jí)報(bào)警跳機(jī)出口邏輯為所有19個(gè)振擺監(jiān)測(cè)點(diǎn)數(shù)值均超過(guò)二級(jí)報(bào)警值,然后延時(shí)60s,驅(qū)動(dòng)跳機(jī)繼電器K31、K32動(dòng)作,將跳機(jī)信號(hào)送往監(jiān)控系統(tǒng)。

圖2 抽水工況報(bào)警流程
2 優(yōu)化方案
(1)結(jié)合黑麋峰機(jī)組實(shí)際情況與振擺國(guó)標(biāo)參考值,建議黑麋峰機(jī)組振擺一級(jí)、二級(jí)報(bào)警值暫如表7所示。
(2)對(duì)一級(jí)報(bào)警與二級(jí)報(bào)警邏輯優(yōu)化如下
1)一級(jí)報(bào)警在過(guò)渡工況下(即機(jī)組不在發(fā)電、抽水、發(fā)電調(diào)相、抽水調(diào)相這4個(gè)穩(wěn)態(tài)時(shí))觸發(fā),延時(shí)60s出口報(bào)警,在穩(wěn)態(tài)時(shí)觸發(fā),延時(shí)5s出口報(bào)警。
2)二級(jí)報(bào)警只在穩(wěn)態(tài)下觸發(fā),通過(guò)邏輯組合后出口跳機(jī)程序,無(wú)報(bào)警,在過(guò)渡工況不激活跳機(jī)流程,同時(shí),定子基座不設(shè)置二級(jí)報(bào)警值。在4個(gè)穩(wěn)態(tài)時(shí),跳機(jī)邏輯組態(tài)如下:
①如果上導(dǎo)擺度與上機(jī)架振動(dòng)數(shù)值均觸發(fā)二級(jí)報(bào)警,則延時(shí)60s后出口跳機(jī)信號(hào)。
②如果下導(dǎo)擺度與下機(jī)架振動(dòng)數(shù)值均觸發(fā)二級(jí)報(bào)警,則延時(shí)60s后出口跳機(jī)信號(hào)。
③如果水導(dǎo)擺度與頂蓋振動(dòng)數(shù)值均觸發(fā)二級(jí)報(bào)警,則延時(shí)60s后出口跳機(jī)信號(hào)。
④如果大軸位移3個(gè)監(jiān)測(cè)點(diǎn)數(shù)值均觸發(fā)二級(jí)報(bào)警,則延時(shí)60s后出口跳機(jī)信號(hào)。

圖3 二級(jí)報(bào)警跳機(jī)出口邏輯

表7 報(bào)警值建議表
3 預(yù)期達(dá)到的效果
通過(guò)梳理黑麋峰機(jī)組振擺監(jiān)測(cè)系統(tǒng)當(dāng)前運(yùn)行情況及保護(hù)邏輯,提出符合黑麋峰機(jī)組實(shí)際的振擺邏輯優(yōu)化方案,并根據(jù)最終優(yōu)化方案投入黑麋峰機(jī)組振擺保護(hù),提升機(jī)組的安全穩(wěn)定運(yùn)行監(jiān)測(cè)水平。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
大電機(jī)技術(shù)(2022年5期)2022-11-17 08:12:48
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
瘋狂英語(yǔ)·新讀寫(xiě)(2020年3期)2020-06-06 09:05:56
數(shù)學(xué)物理學(xué)報(bào)(2018年4期)2018-09-14 03:40:58
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動(dòng)控制(2015年4期)2015-01-01 07:08:44
計(jì)算物理(2014年2期)2014-03-11 17:01:44
鄭州大學(xué)學(xué)報(bào)(理學(xué)版)(2014年3期)2014-03-01 04:21:00
