基于主動轉向與差動制動協調的雙級預警車道偏離防止預測控制*
2019-09-04 03:06:40魏振亞王其東王慧然陳無畏梁修天
汽車工程 2019年8期
魏振亞,王其東,2,王慧然,陳無畏,梁修天
(1.合肥工業大學汽車與交通工程學院,合肥 230009; 2.合肥學院機械工程系,合肥 230071)
前言
據我國交通部統計,約有50%的汽車交通事故是因為汽車偏離正常的行駛車道引起的,究其原因主要是駕駛員心神煩亂、注意力不集中或駕駛疲勞。根據(美國)聯邦公路局的估計,美國2012年所有致命的交通事故中44%是與車道偏離有關的,同時車道偏離也被看成車輛側翻事故的主要原因[1]。車道偏離輔助系統可有效避免或減輕車道偏離事故。
車道偏離輔助系統按照不同的應用功能分為車道偏離預警系統、車道偏離防止系統和車道保持輔助系統。本文中研究的車道偏離防止系統包括輔助決策和輔助控制兩個方面的關鍵技術。輔助決策主要是判斷車道偏離以觸發輔助控制的算法,主要有橫越車道線距離(distance to lane crossing,DLC)和橫越車道線時間(time to lane crossing,TLC)兩類。橫越車道線距離算法簡單有效,但未考慮車輛自身的狀態,因此當車輛狀態發生改變時適應性差,而橫越車道線時間算法則可根據自車的狀態變化實時調整對車道偏離程度的判斷,其適應性優于前者。文獻[2]中提出基于動態TLC觸發閾值的輔助決策方法,利用航向角和執行機構響應時間等因素動態確定TLC閾值,但未考慮道路環境和駕駛員行為的影響,TLC閾值選取的過于保守會導致系統頻繁誤啟動。文獻[2]中提出一種基于動態TLC閾值和DLC閾值的偏離輔助決策方法,可有效減少誤警率,但TLC和DLC的聯合決策方法較為復雜。本文中根據運動幾何公式和車輛的軌跡預測計算TLC,并通過設置閾值的方式來進行偏離判斷,其計算公式簡單,可適應各種路況,且能根據自車狀態的變化進行實時調整,因而不會導致輔助系統頻繁誤啟動。
目前輔助控制的實現包括轉向控制和差動制動控制兩種。轉向控制分為施加額外的轉向力和角位移,前者轉向部分可實現與電動助力轉向(electric power steering,EPS)系統的結構共用,具有節能和結構簡單等優點。后者盡管能精確控制轉向角度,但須額外增加轉向執行機構,會壓縮車體空間,也可能在行車中影響其他零部件的運行。差動制動控制依靠兩側車輪的制動力差產生橫擺力矩,實現車輛轉向,但該方法會改變車輛的轉向響應,給駕駛員帶來不適。對于兩種控制方法,如果駕駛員和輔助控制系統同時對車輛實施橫向運動控制,兩者的協調性至關重要。文獻[3]中建立線性時變人-車系統模型,并在駕駛員模型中加入高斯干擾信號,利用隨機模型預測控制器,在安全概率的約束下利用二次規劃計算出輔助轉角,防止車輛駛出車道。文獻[4]中利用差動制動實現車道保持,建立了分層控制模型,上層控制器在滿足舒適性的前提下計算出防止車輛偏離車道的期望橫擺角速度,下層控制器根據期望值分配相應的制動力給各個車輪。文獻[5]中針對車道偏離輔助系統轉向控制中的人機協同問題,提出一種人機共享的決策和控制方法。考慮駕駛員轉矩、道路曲率和縱向車速,設計模糊控制器確定虛擬車道邊界寬度,再根據車輪是否超出虛擬邊界進行輔助控制決策。在此基礎上根據車-路位置關系建立車輛預瞄處偏差的動態模型,設計LPV/H∞控制器跟蹤車道中心線決定期望前輪轉角。應用滑模觀測器估計轉向阻力矩,設計考慮駕駛員轉矩和轉向阻力矩的2階滑模控制器決定輔助轉矩,再由主權分配模塊進一步對人機控制主權進行分配,實現輔助系統與駕駛員之間的共享控制。
分析上述文獻可得出以下結論:主動轉向與差動制動協調控制時,加入適當的約束,能使車輛更加安全,更平穩地回到車道中心線;未來的車道偏離輔助系統在保證車輛不偏離車道的基礎上,應當給予駕駛員足夠的駕駛自由。
基于以上結論,本文中提出了一種雙級預警的利用主動轉向與差動制動協調的車道偏離防止控制策略。設置關于TLC的兩級預警機制,當TLC達到第一預警閾值時,為避免轉向過程中,主動轉向的介入導致橫擺角速度突變,優先利用差動制動使車輛回到車道中心線,此時,駕駛員對轉向盤起主要作用。假如駕駛員和差動制動的操作不能使危險解除,TLC將達到第二閾值,主動轉向控制被激活,控制器對轉向盤起主導作用。為了保證輔助系統工作過程中車輛的穩定性和安全性,控制方法采用模型預測控制。此外,由于在TLC達到第一預警后,駕駛員仍可自由轉動轉向盤,差動制動僅調整車身姿態而不干涉駕駛員的轉向控制,因而能在車輛危險程度較低時賦予駕駛員充分的駕駛自由。
1 模型搭建
1.1 車輛道路模型
假設車輛上已安裝了車道線檢測系統,并忽略路面坡度和空氣阻力的影響。如圖1所示,則車輛-道路參考模型[6]可以表示為
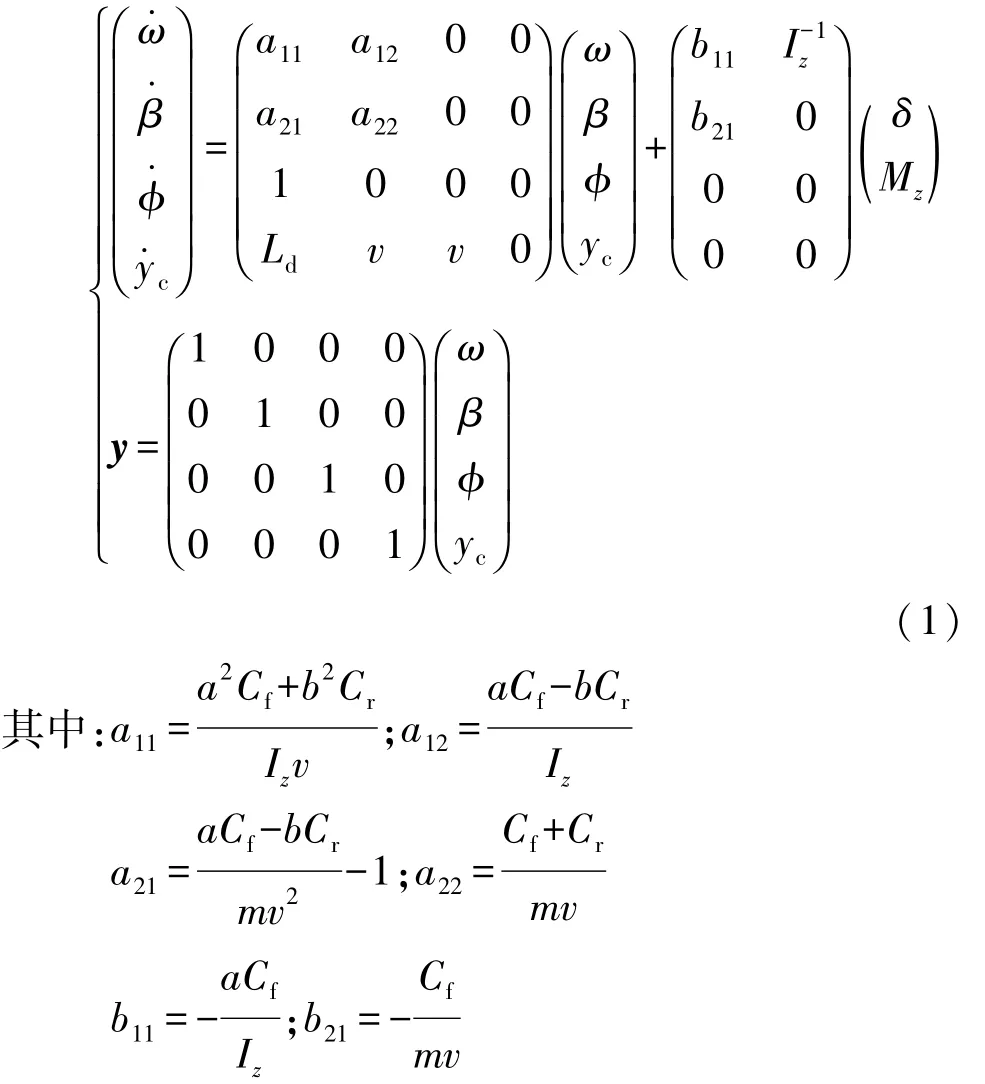
式中:ω為車輛橫擺角速度;β為質心側偏角;φ為車輛橫擺角;yc為側向位移;a,b為車輛質心到前、后軸距離;Cf,Cr為前輪、后輪總側偏剛度;m為整車質量;Iz為車輛繞Z軸轉動慣量;v為縱向車速;Ld為預瞄點到車輛質心的距離;Mz為橫擺力矩的大小。
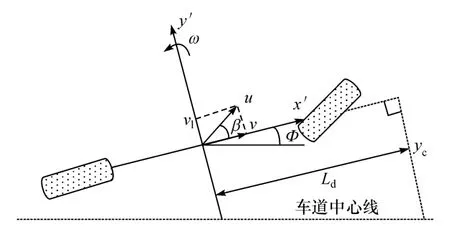
圖1 車輛-道路參考模型
1.2 跨道時間模型
當車輛在道路上行駛時,取某時刻車輛與道路的相對位置關系進行分析,如圖2所示。
假設未來一段時間內車輛的轉向盤轉角不變,則車輛未來的運動軌跡是一段弧線,令r1=AC,r2=OA,則

式中δ0為車輛速度方向與車輛縱軸的夾角。
由阿克曼轉向幾何關系可得

又因為
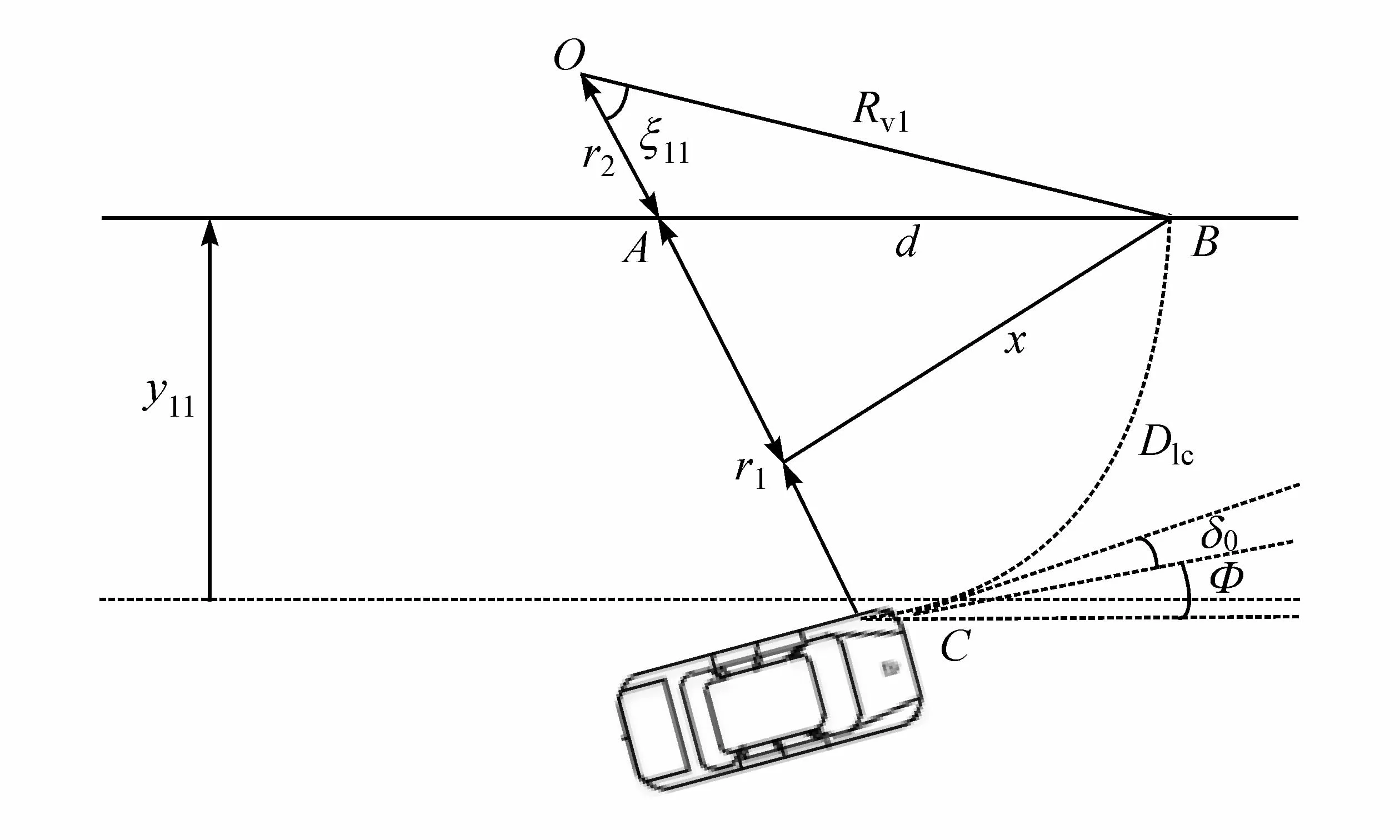
圖2 跨道時間模型

在ΔOAB中,由幾何關系得

由余弦定理可得

則弧 Dlc=ξllRvl,跨道時間為

式中:Rvl為轉彎半徑;ξll由式(6)給出;yll為車輛前輪距離對應車道邊界線的距離,ll表示左前輪對應左車道邊界線或右前輪對應右車道線。
2 基于雙級預警的主動轉向與差動制動協調的車道偏離防止控制系統設計
2.1 控制系統流程設計
本文中主動轉向與差動制動協調控制策略采用常見的前輪轉向和后輪獨立制動方案。主動轉向與差動制動協調控制系統分為上層、中層和下層,上層主要包含TLC模型和決策部分;中層包含模型預測控制器;下層包含制動力分配模塊和主動轉向角度決策模塊。
根據車載相機所采集的車輛距離道路中心線的橫向偏差和車身傳感器采集的車輛運動狀態信息,TLC模型實時計算出車輛的跨道時間來衡量車輛偏離車道的危險程度。
系統工作流程如圖3所示,當TLC達到第一預警閾值時,車輛有偏離車道的趨勢,但危險程度較低,此時優先使用差動制動控制,使車輛回到車道中心線。假使優先使用主動轉向控制,一方面汽車轉向時,汽車質心側偏角相對較大,不利于汽車穩定性控制;另外一方面轉向時輪胎側偏角也較大,根據輪胎側偏角與側偏力的關系可知,側偏角過大后,輪胎側偏力在峰值處會下降并保持一定值,當主動轉向工況下差動制動觸發后,為汽車提供橫擺力矩補償控制,使輪胎側偏角減小,側偏力返回峰值處,造成橫擺角速度階躍變化。因此,優先使用差動制動不但可有效避免輪胎側偏力特性引起的橫擺角速度階躍變化,且差動制動的介入還可起到提醒駕駛員的目的。整個過程中駕駛員仍然能使用轉向盤操縱車輛,給予了駕駛員充分的駕駛自由。由于差動制動主要是為了附加橫擺力矩,所以為了減小其對車輛縱向速度的干擾,差動制動力應當設置一個最大值,此時其所能提供的附加橫擺力矩最大值為|M0|。
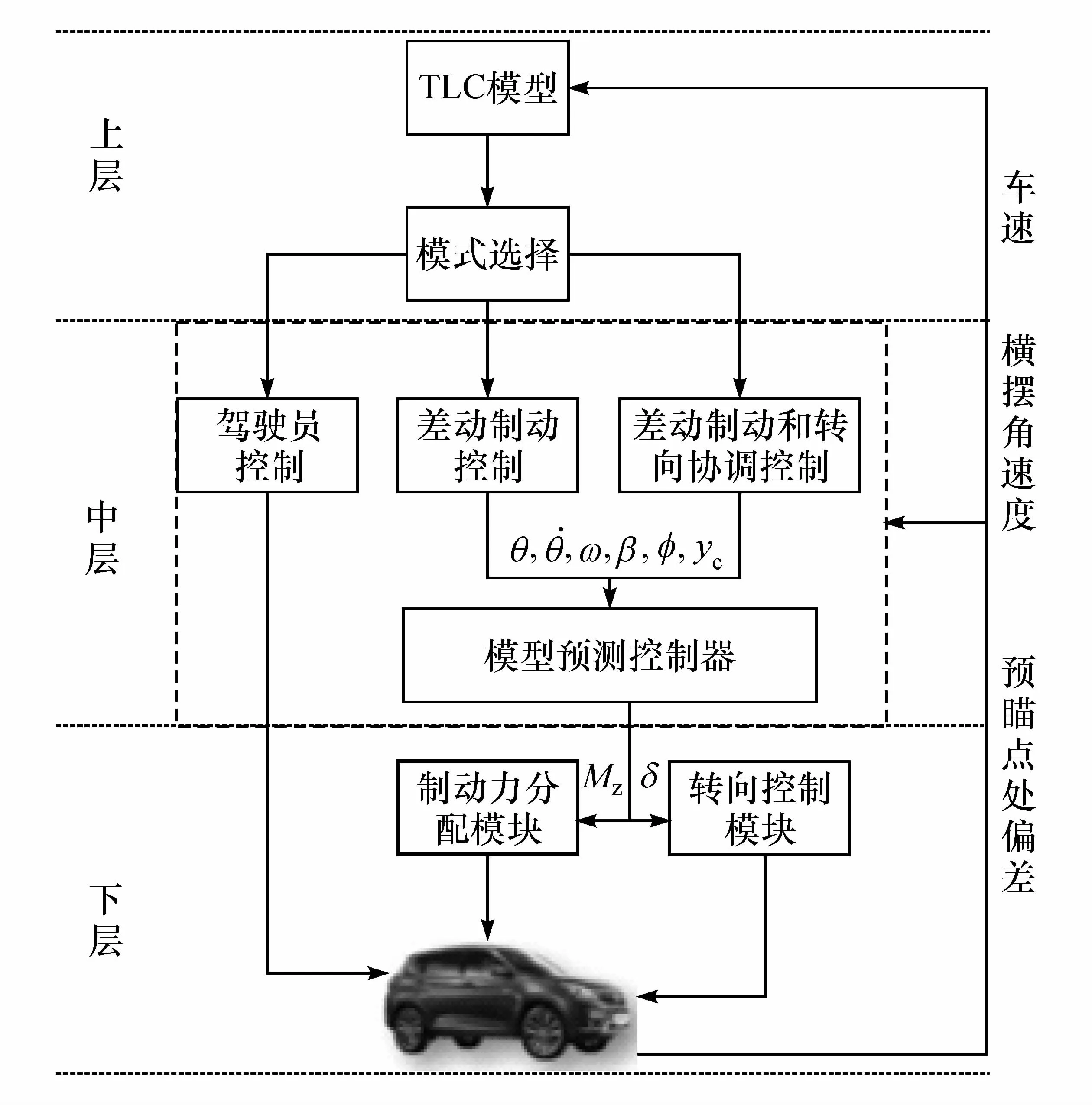
圖3 系統工作流程圖
當TLC達到第二預警閾值時,車輛偏離車道危險程度較高,此時差動制動與主動轉向系統協調工作,使車輛安全平穩地回到車道中心線。
設計中層控制器時,考慮到車輛運行的平順性和安全性,須對狀態量施加相應的約束,因此本文中選擇使用模型預測控制來計算轉向盤轉角和期望橫擺力矩。下層控制器根據所需的橫擺力矩選擇適當的車輪制動并決策其制動力值。
2.2 控制系統上層的設計
控制系統上層的設計主要包含TLC閾值的選取。閾值選取太小可能會導致車輛偏離車道,發生危險;閾值選取太大可能導致預警系統過于靈敏產生誤報,且頻繁的預警會帶給駕駛員恐慌。
首先設置第二預警閾值,第二預警閾值可取傳統車道偏離輔助系統的預警閾值。根據先前的研究[7],本文第二預警閾值取為 2 s。
當TLC達到第一預警閾值,但仍大于第二預警閾值時,僅使用差動制動實現車道保持。一級預警啟動后,若駕駛員未意識到危險,將會觸發二級預警;若駕駛員意識到車輛有偏離車道的危險,則進行主動干預。因此,一級預警與二級預警啟動的時間間隔應當充分考慮駕駛反應時間和轉向響應時間。從駕駛員接受到刺激到作出反應所需的時間,稱為駕駛反應時間。反應時間的影響因素眾多,包括駕駛工作環境(車內外環境、行駛條件)、駕駛員的睡眠、生活環境和本身情況(身體條件、經驗條件、年齡、性別、性格)等。英國《公路法規》把反應時間定為0.68 s,稱為“思索時間”。轉向控制實現信息從眼睛到手的傳遞,通常需要0.3 s左右[8]。因此,駕駛反應時間可以取1 s。對于轉向系統響應時間(從階躍輸入開始到首次達到穩態值的90%所需的時間),根據QC T 480—1999汽車操縱穩定性指標限值與評價方法規定:最大總質量小于或等于6 t的汽車,當車速小于120 km/h時,汽車橫擺角速度響應時間的下限值為0.3 s。為保證車輛行駛的安全性,需要保留一定的安全裕度。因此,第一預警閾值與第二預警閾值的跨道時間間隔取4 s。
綜合上述分析,本文中設計的雙級預警機制中,一級預警閾值為6 s,二級預警閾值為2 s。
2.3 控制系統中層的設計
當車輛有偏離車道的危險時,首先啟動一級預警,僅使用差動制動使車輛回到車道中心線。控制器的輸出僅為附加橫擺力矩,此時駕駛員仍能操作轉向盤。為了避免差動制動力影響車輛的正常行駛,附加的橫擺力矩應當添加相應約束。
一級預警啟動后,駕駛員操作不當或在極限附加橫擺力矩作用下車輛仍然有偏離車道的危險,此時二級預警啟動,駕駛員失去對車輛的掌控,模型預測控制器的輸出為前輪轉角和附加橫擺力矩。預測控制器的設計具體如下。
2.3.1 預測方程
對式(1)采用1階差商的方法離散化處理,得到預測方程:
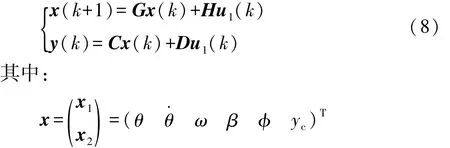
式中:I為單位矩陣;T為采樣周期;A1,A2,B1,B2,C1,C2,D1,D2為對式(1)離散處理時產生的矩陣。
2.3.2 約束條件
為保證車輛的穩定性和考慮轉向系結構的極限,添加必要的約束,即 βmin≤β≤βmax,ΔUmin≤ΔU≤ΔUmax,ΔU為輸入變量的增量。根據博世公司的車輛穩定性研究結果,附著良好的干燥瀝青路面車輛穩定行駛的質心側偏角極限可以達到±12°,附著系數較低的冰雪路面極限值近似±2°[9]。
為保證駕駛舒適性和車輛的穩定性,須對車輛的橫擺角速度添加相應約束ωmin<ω<ωmax。
2.3.3 控制器參數設計
預測控制的目標函數定義為

式中:yref(t)為參考輸出;Hp為預測時域;Hc為控制時域;Q和R為加權矩陣;ΔU為輸入變量的增量。
車道偏離輔助控制啟動時,首先得到距離左側車道中心線的側向偏差yd,同時考慮車輛行駛的安全性和最終姿態,轉向盤轉速、橫擺角速度和質心側偏角應盡可能小,因此,轉向盤轉角、轉向盤角速度、橫擺角速度、質心側偏角、偏航角和側向位移的期望值分別為 θ,0,0,0,φ和 yd,則考慮輸出(即期望狀態向量)為
yref=(θ 0 0 0 φ yd)T
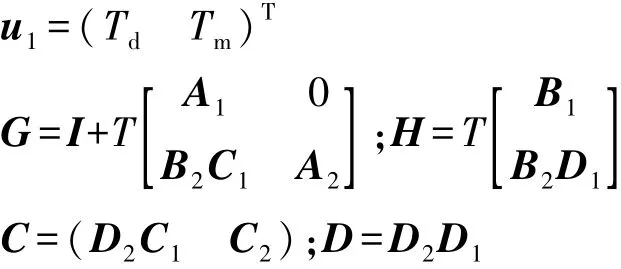
參照文獻[10]并結合本文的要求,選取采樣周期 T=0.01 s,預測時域 Hp=100,控制時域 Hc=10,狀態誤差權矩陣為
僅差動制動工作時控制量權矩陣 R0=,差動制動與主動轉向系統協調工作時,,此時控制系統性能較好。
2.4 控制系統下層的設計
模型預測控制器計算得出的附加橫擺力矩Mz需要通過差動制動來提供。因此制動力分配的主要目標是選擇適合的制動輪和確定其合適的制動力。
為簡化計算,輪胎動力學模型為

式中:TB為制動力矩;R為輪胎有效半徑;Fx為輪胎制動力。
假設模型預測控制器計算出的期望橫擺力矩為Mz,則有

式中:dr為后軸輪距;ΔFx為左右后輪縱向力的差值。因此,左右后輪制動力矩的差值為

采用后輪制動方案時,可對單獨的一個車輪施加制動力,也可對兩個車輪都施加制動力,文獻[11]中從最優控制的角度分析,發現使用單輪制動的方案優于使用雙輪制動。使用單輪制動的方案時,輪胎總的縱向力較小,此時制動力對車速的影響較小,而且能防止與前輪轉向操作產生干涉,因此本文中也選取單輪制動的方案,如圖4所示。

圖4 不同偏離情況下的制動輪示意圖
基于上述分析,以逆時針為正,橫擺角速度ω的變化和各輪制動力的變化關系為
式中 ξ=|ωd|-|ω|,ωd為期望橫擺角速度。
采用EPS作為轉向執行機構時,模型預測控制器決策出的前輪轉角,須先轉化為相應的主動轉向角度,再發送給EPS轉向電機:

式中:δsw為發送給EPS轉向電機的主動轉向角度;i為傳動系統傳動比。
3 仿真計算與結果分析
3.1 Carsim/Simulink聯合仿真
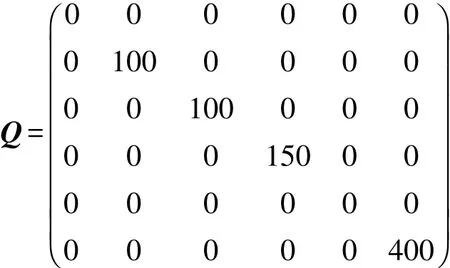
為驗證所提出的控制策略的有效性,在Carsim中建立車輛模型和道路環境,采用MATLAB/Simulink建立車道偏離防止控制系統模型。仿真車輛相關參數如表1所示。
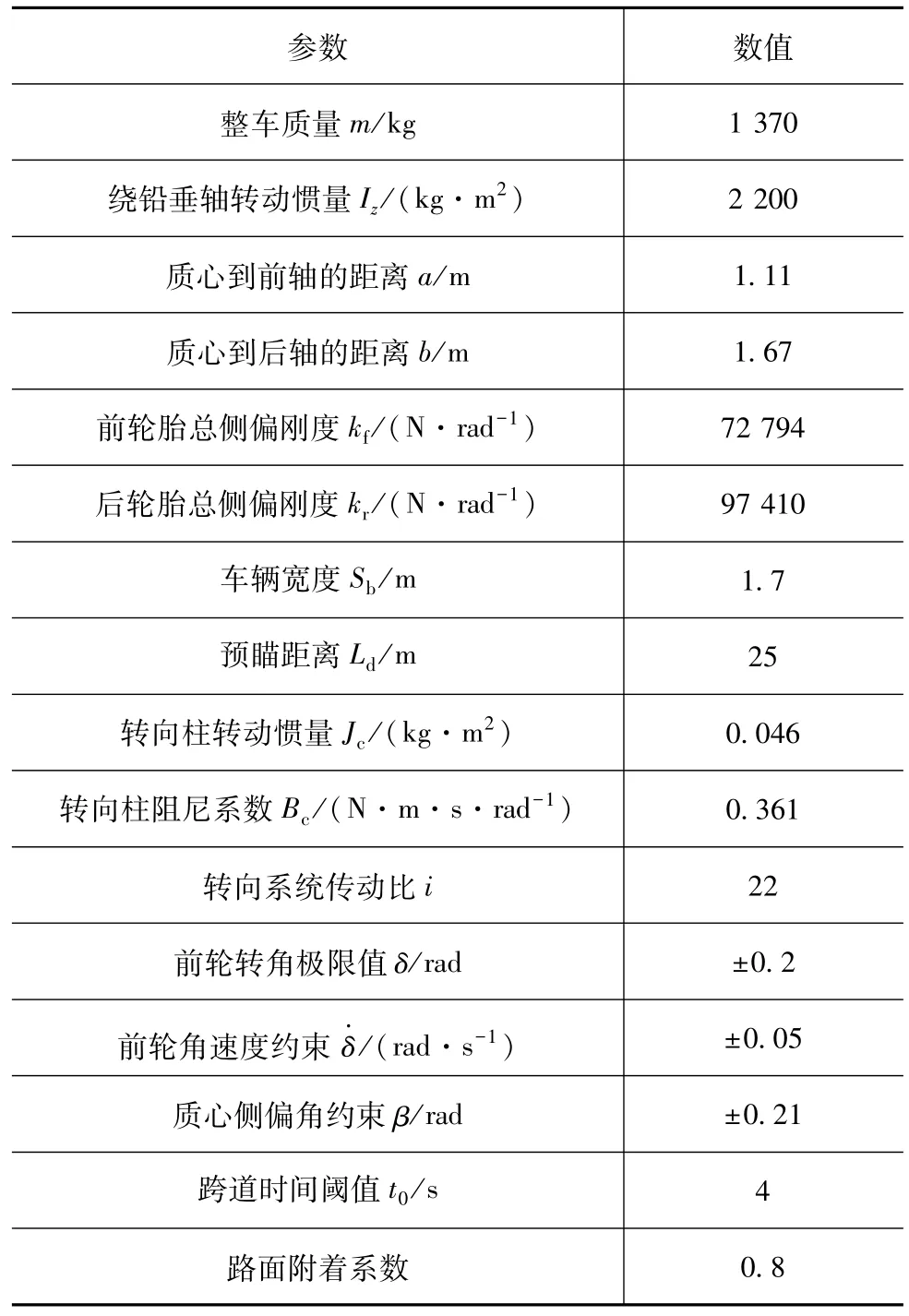
表1 仿真車輛相關參數
當發生車道偏離時,駕駛員通常有3種反應:正確操作、不操作和誤操作。正確操作指駕駛員做出正確的反應使車輛有回到車道中心線的趨勢。為驗證所提出的控制策略的有效性,主要驗證駕駛員不操作和誤操作的情況。
仿真1:車速為80 km/h,路寬為3.75 m,路面附著系數為0.8。初始時刻給轉向盤一個斜率為10°/s的斜坡轉角輸入,1 s后維持10°的轉角,使車輛偏離車道,之后駕駛員不操作轉向盤。當車輛無偏離車道的危險時,跨道時間很大,為了便于作圖,本文中限制跨道時間最大值為8 s。仿真結果如圖5~圖13所示,為便于說明本文中所提出的協調控制策略的有效性,圖中同時給出僅采用主動轉向糾正車輛的偏離行為時的仿真結果。
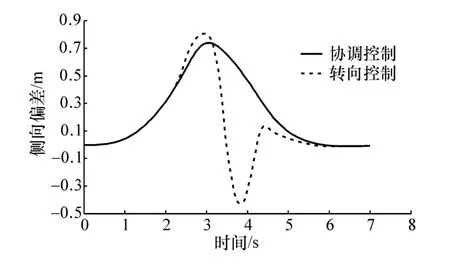
圖5 側向位移
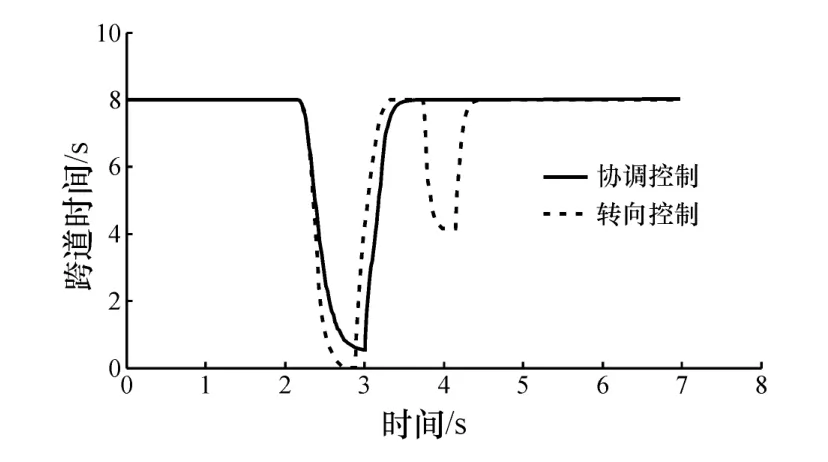
圖6 跨道時間
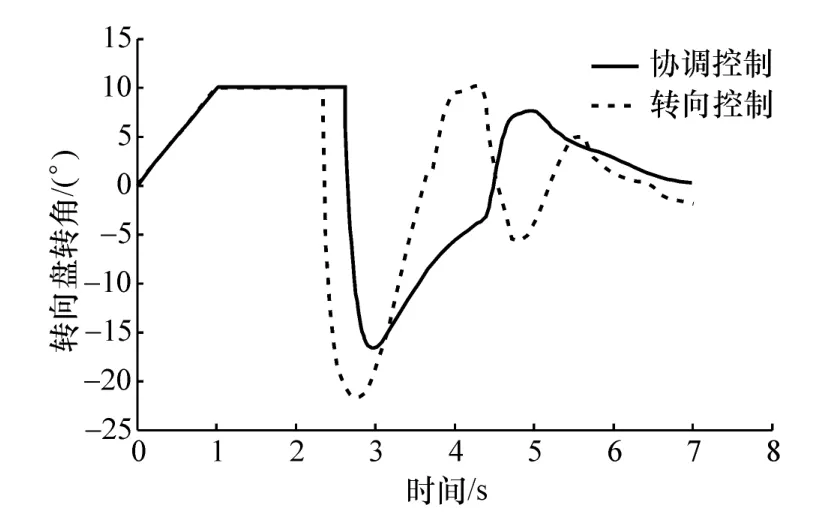
圖7 轉向盤轉角
由圖5可知,在整個仿真過程中車輛最大偏離位移為0.75 m,說明車輛始終未偏離車道。考察圖6~圖8可知,2.3 s時車輛跨道時間介于2~6 s之間,介于第一預警閾值和第二預警閾值之間,此時車道偏離輔助控制系統啟動,差動制動單獨工作。2.8 s處跨道時間小于2 s,此時處于第二預警狀態,主動轉向和差動制動同時工作,使車輛回到中心線。相比較而言,僅采用主動轉向糾正車輛的偏離行為時,側向偏差出現了超調,轉向盤反復調整,不如協調控制平滑穩定,偏離距離也更大。并且不同于采用差動制動控制可迅速糾正車輛的航向角偏差,僅采用轉向控制須施加更大的轉向盤轉角和更長的糾正時間,留給駕駛員的反應時間也更少。此外,協調控制由于首先進行差動制動再進行轉向控制,因而圖中各曲線的響應時間比單獨采用主動轉向控制時略為滯后。
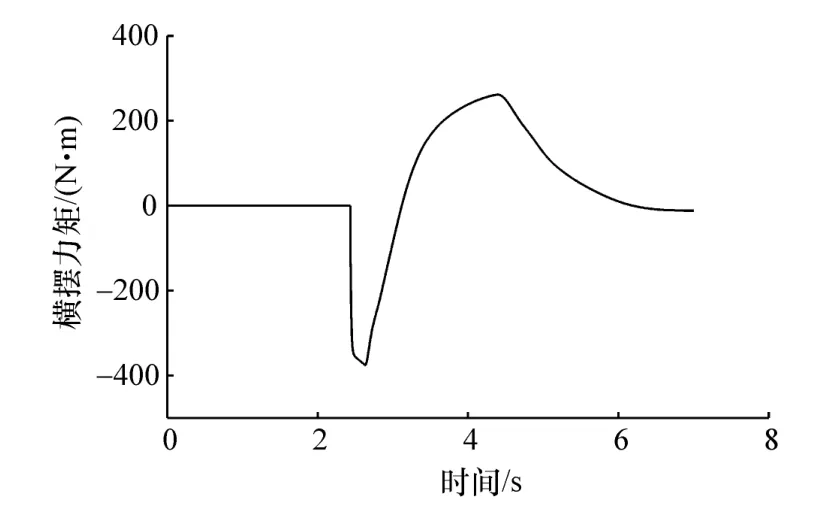
圖8 理想橫擺力矩
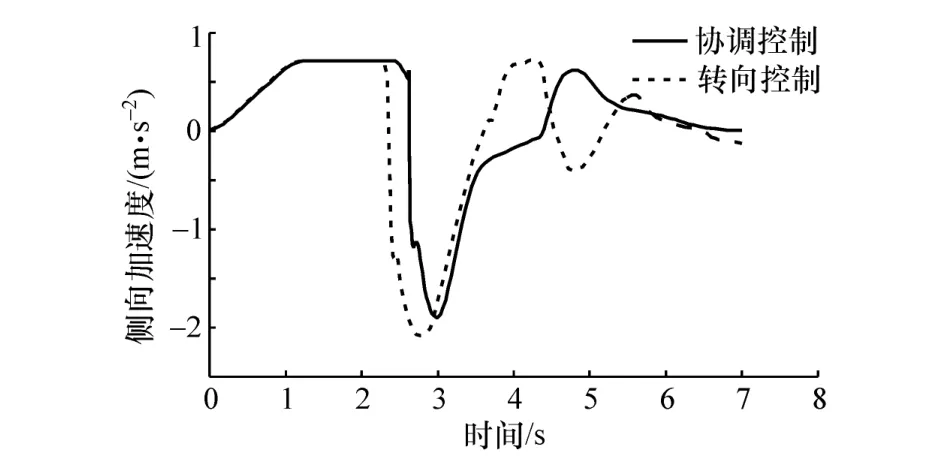
圖9 側向加速度
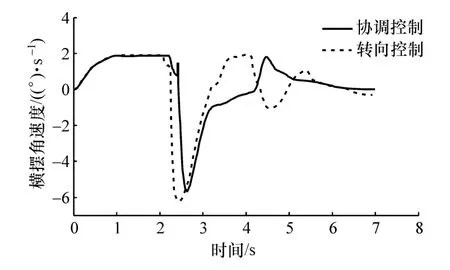
圖10 橫擺角速度
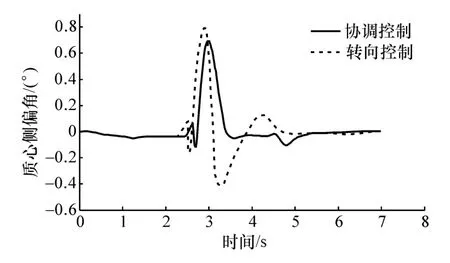
圖11 質心側偏角
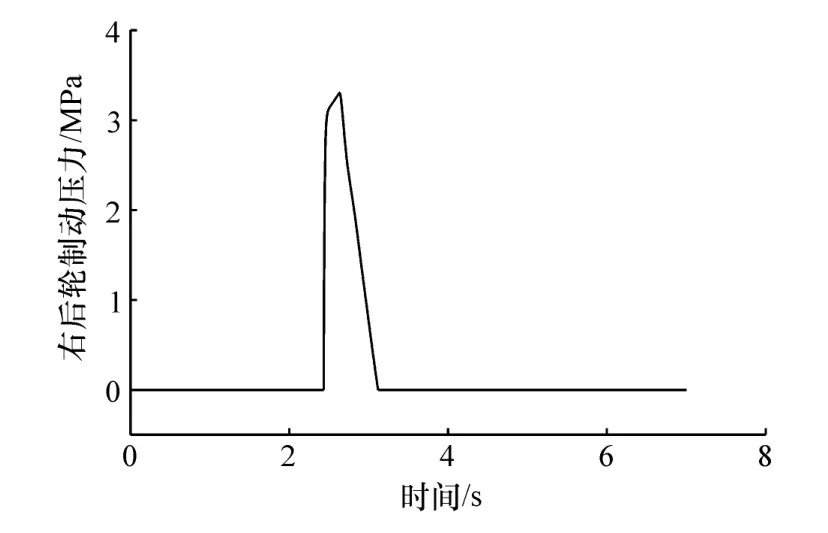
圖13 右后輪制動壓力
由圖9~圖11可知,由于使用了模型預測控制,對表征車輛穩定性相關的狀態變量及其變化率添加了有效的約束,車道偏離輔助系統工作過程中車輛的側向加速度幅值為2 m/s2,橫擺角速度幅值為5.8°/s,質心側偏角幅值為 0.63°,均在合理范圍內且其變化過程較為緩和,不存在大幅的突變和振蕩。與單獨采用主動轉向控制相比,其波動幅值更小,曲線的變化也更為平緩。本文中設計的模型預測控制器很好地保證了駕駛員不操作時,車道偏離輔助控制系統工作過程中車輛行駛的安全性和穩定性。
仿真2:車速為80 km/h,路寬為3.75 m,路面附著系數為0.8。初始時刻給轉向盤一個斜率為10°/s斜坡轉角輸入使車輛偏離車道。同樣限制跨道時間最大值為8 s。為模擬駕駛員誤操作的情況,當跨道時間小于6 s時給轉向盤一個20°的斜坡輸入,使車輛加速偏離。仿真結果如圖14~圖22所示,圖中同時給出僅采用主動轉向糾偏的仿真結果,以供對比。
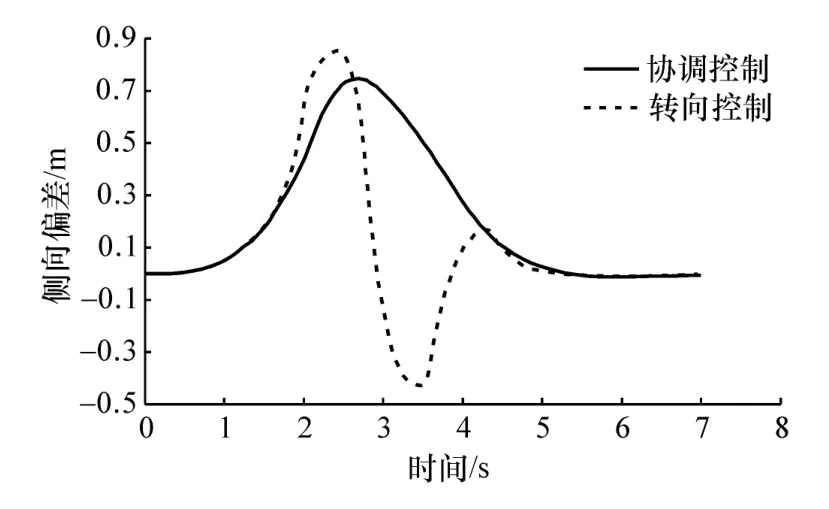
圖14 側向位移
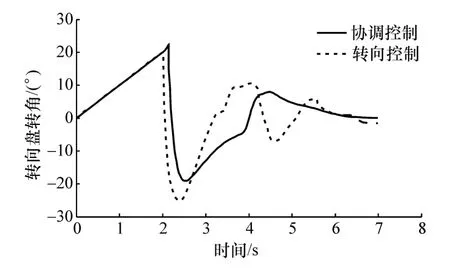
圖16 轉向盤轉角
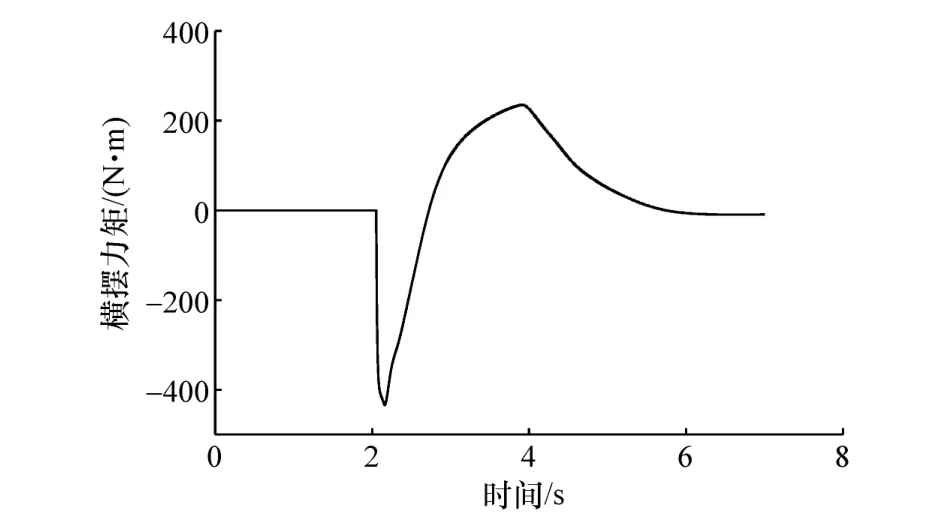
圖17 理想橫擺力矩
由圖14~圖16可知,仿真開始時車輛在轉向盤轉角10°/s斜坡輸入下逐漸偏離車道,2.1 s時跨道時間小于6大于2 s,差動制動開始單獨工作,右后輪制動。到2.3 s時刻,跨道時間閾值達到第二預警閾值2 s,模型預測控制器接管轉向和制動系統,兩者協調工作,使車輛回到車道中心線。在車輛發生偏離車道危險的情況下,駕駛員誤操作時,與轉向控制相比,協調控制作用下的轉向盤更加平穩地回零,且糾正過程中轉向盤轉角的最大值也較小。上述過程驗證了本文中設計的主動轉向與差動制動協調控制策略的有效性。如果僅采用主動轉向做糾正手段,其最大側向偏移距離約增大了15 cm,同樣側向偏差出現了超調,轉向盤被反復調整,在調整階段中其TLC有明顯的降低。
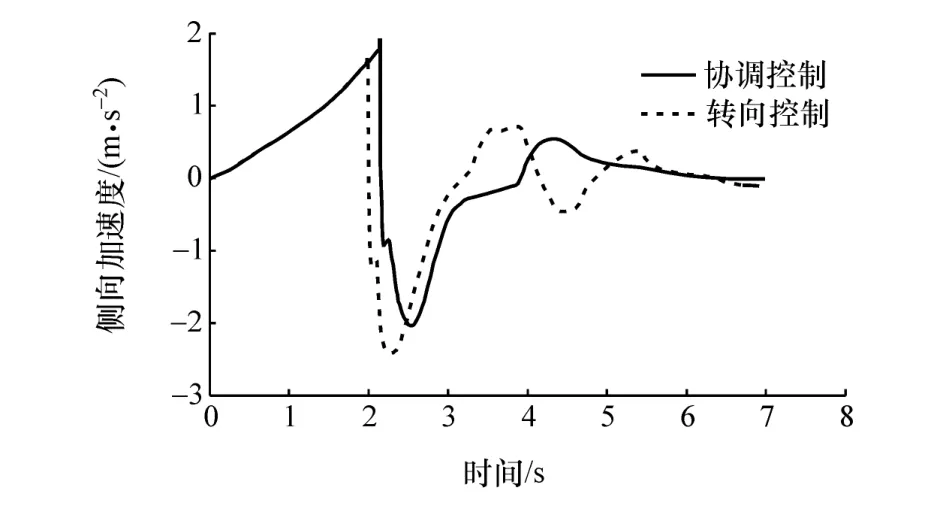
圖18 側向加速度
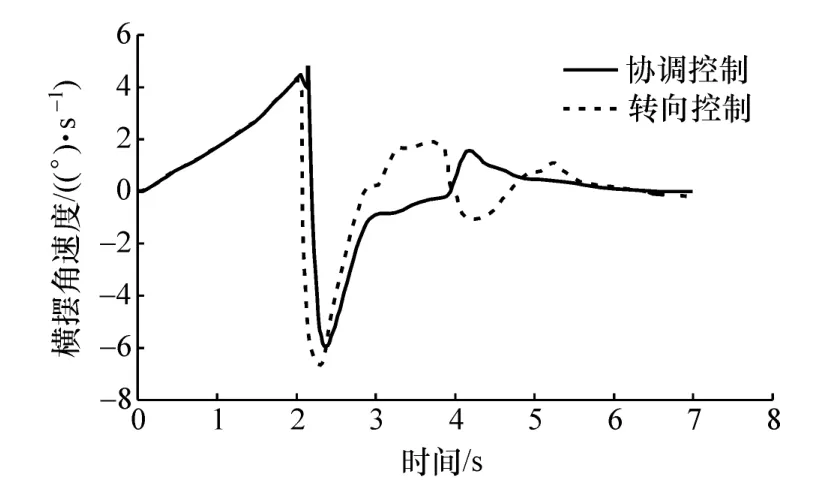
圖19 橫擺角速度
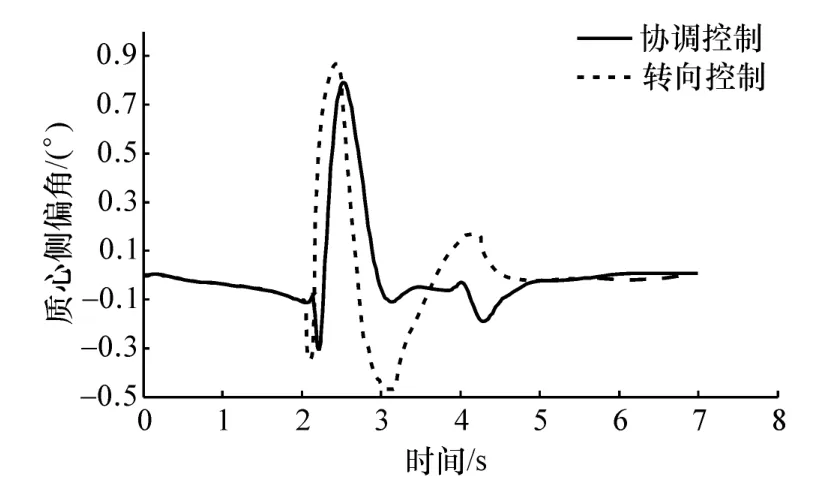
圖20 質心側偏角
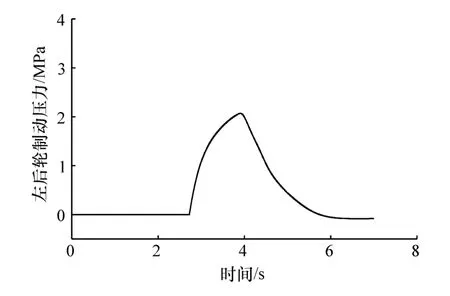
圖21 左后輪制動壓力
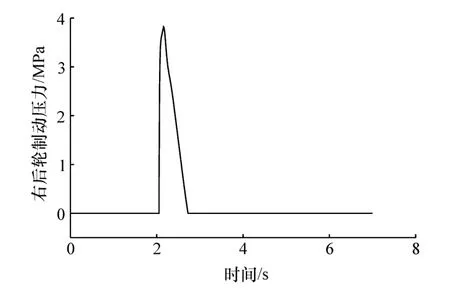
圖22 右后輪制動壓
觀察圖17~圖19可知,車道偏離輔助系統工作過程中車輛的側向加速度幅值為2 m/s2,橫擺角速度幅值為 5.97°/s,質心側偏角幅值為 0.81°,均在合理范圍內且其變化較為平緩。而僅采用主動轉向作為糾偏手段時,其側向穩定性指標值更大,側向加速度幅值為2.46 m/s2,橫擺角速度幅值為6.41°/s,質心側偏角幅值為 0.9°,且從兩種控制方式的曲線對比上可以看出,單獨轉向控制的曲線變化程度更為劇烈。可見本文中設計的模型預測控制器保證了駕駛員誤操作情況下,車輛行駛的安全性和穩定性。
綜上所述,駕駛員在不操作或者誤操作時,本文中設計的基于雙級預警的主動轉向與差動制動協調控制策略均可使車輛較快地回到車道中心線,值得注意的是,如圖9~圖11和圖17~圖19所示,當車道偏離預警系統啟動一級預警,側向加速度值、橫擺角速度值和質心側偏角值均產生明顯的波動,即車道偏離防止系統在糾正車道偏離的同時亦給予駕駛員一定的警示作用。
3.2 硬件在環試驗
為進一步驗證本文中基于雙級預警和主動轉向與差動制動協調控制策略的有效性,采用Carsim建立車輛模型的仿真環境,聯合LabVIEW PXI進行駕駛員和硬件在環試驗研究。試驗平臺的設備主要有轉向盤、轉向執行電機與控制器、伺服電機、轉角與車速等傳感器、PXI主機、接線板、制動盤和計算機監測系統等。
上位機采用一臺PC機,進行Carsim整車模型參數和虛擬道路的建立、LabVIEW的控制算法設計、人機界面的設計等,并在PC機中實時顯示并監測車輛在試驗過程的車速、轉矩、橫擺角速度等狀態變化。下位機采用德州儀器公司的PXI主機執行,將編好的算法程序下載到該主機的實時操縱系統進行編譯運行。接口系統一方面將轉角傳感器實時獲取的轉向盤轉角信號、轉矩傳感器獲取的轉向盤轉矩信號、車速傳感器的車速信號等傳輸到PXI主機,另一方面將車輛模型中的轉向阻力矩和轉矩分別發送到路感電機控制器和執行電機控制器中。硬件在環試驗平臺如圖23所示。
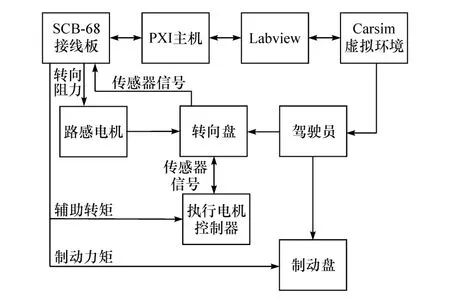
圖23 硬件在環試驗平臺
駕駛員在環操縱車輛以車速80 km/h在虛擬道路上行駛,虛擬車道路寬設為3.5 m,路面附著系數為0.8。為與仿真1的工況保持一致,駕駛員操作轉向盤短時間內使轉向盤轉角達到近似10°后,維持當前車輛轉向狀態,試驗結果如圖24~圖29所示。由圖24可知,在整個在環仿真過程中車輛最大偏離位移為0.75 m,車輛始終維持在本車道內行駛,與聯合仿真的結論相同。根據圖25~圖27,可看出2.1 s時跨道時間處于2~6 s之間,此時差動制動單獨工作;2.6 s時跨道時間已低于2 s,為了及時糾偏,主動轉向和差動制動系統同時工作。圖中硬件在環的試驗結果相對于仿真結果有明顯的提前,其原因在于實際駕駛員在轉動轉向盤時,轉到預定轉角所用的時間要少于聯合仿真,因此車輛更早地出現偏離趨勢。若忽略這一影響,則硬件在環與聯合仿真的試驗結果大致相同,本文中設計的模型預測控制器可很好地糾正車輛的偏離行為,保證行車安全性和穩定性。

圖24 側向位移
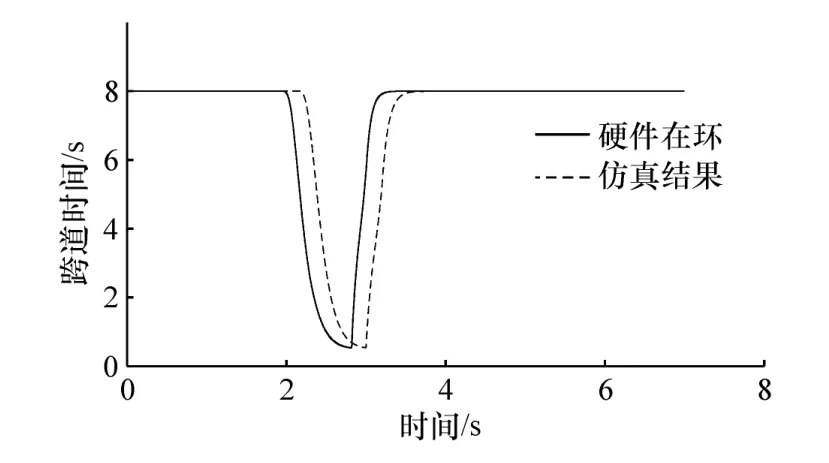
圖25 跨道時間
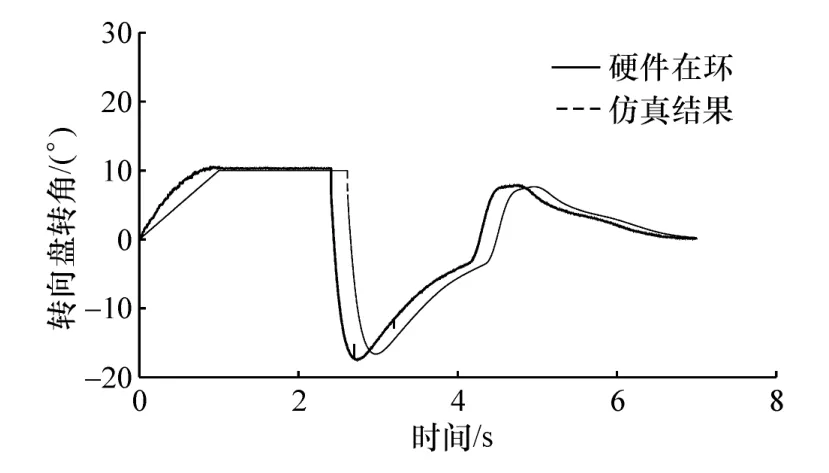
圖26 轉向盤轉角
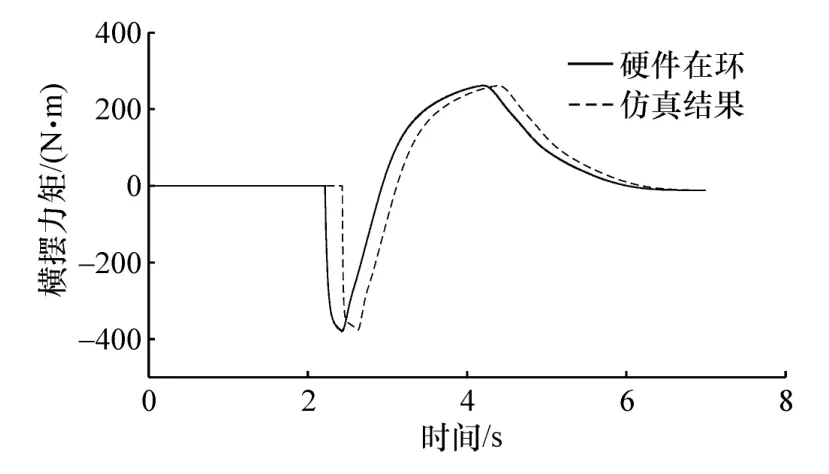
圖27 理想橫擺力矩
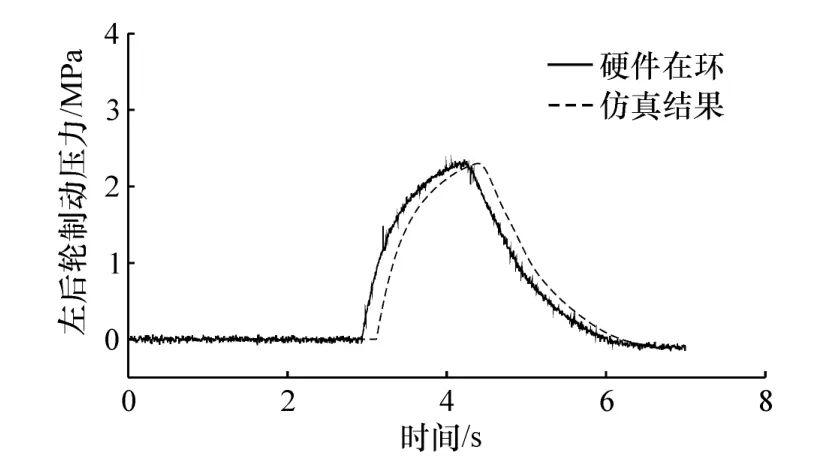
圖28 左后輪制動壓力
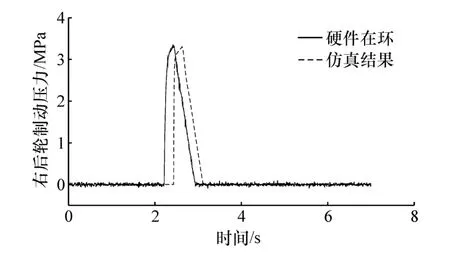
圖29 右后輪制動壓力
4 結論
(1)本文中設計的雙級預警機制,既能在駕駛員走神或誤操作時保證車輛行駛的安全性,又能在車輛危險程度較低時賦予駕駛員充分的駕駛自由。
(2)本文中設計的主動轉向與差動制動協調控制策略在車輛有偏離車道危險時,首先啟動一級預警,僅使用差動制動使車輛回到車道中心線;若駕駛員操作不當或在極限附加橫擺力矩作用下車輛仍然有偏離車道的危險時,啟動二級預警,同時使用轉向控制和差動制動控制。
(3)為有效約束協調控制起作用時車輛穩定性相關的變量,保證車輛的穩定性,本文中采用模型預測控制,對質心側偏角和橫擺角速度的大小添加了合理的約束,并采用了差動制動來抑制質心側偏角,極大地提高了車輛的軌跡跟蹤能力和穩定性。
(4)采用駕駛員和CarSim/LabVIEW硬件在環試驗驗證了所設計的控制策略的可行性和有效性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
汽車電器(2018年1期)2018-06-05 01:22:54
光學精密工程(2016年6期)2016-11-07 09:07:19
公民與法治(2016年4期)2016-05-17 04:09:26
核科學與工程(2015年4期)2015-09-26 11:59:03
