基于變增益滑動模態的無人潛水器高度控制
2019-09-05 06:18:00馮正平畢安元胡國棟
艦船科學技術 2019年8期
關鍵詞:模態
莊 鵬,馮正平,畢安元,胡國棟
(上海交通大學 船舶海洋與建筑工程學院,高新船舶與深海開發裝備協同創新中心,上海 200240)
0 引 言
無人潛水器在水下特種作業任務中有著非常重要的作用,如海洋科考、深海搜尋與救援、石油和天然氣勘探等。在復雜海況下,無人潛水器工程作業時的姿態保持和高度控制是一項艱難的任務[1]。由于非結構化的水下環境導致的外部擾動、復雜外形無人潛水器水動力系數的不準確等問題的存在,傳統的線性控制方法較難保證無人潛水器的控制性能[2-4]。而滑動模態控制(SMC)是一種魯棒控制方案,已廣泛應用于線性和非線性系統,具有魯棒性強、對模型誤差不敏感、響應速度快等特點,因此可以利用該方法來解決參數不確定性和外部擾動不確定性帶來的控制問題[3,5-6]。
基于不確定性、擾動補償的自適應模糊算法的滑模控制器解決了在具有外部擾動的狀態下的控制性能問題,但是其抖振現象依然存在[5,7]。滑動模態控制器工作過程中的抖振現象會導致執行機構過度磨損和能量消耗,甚至可能激發高頻未建模動態,從而導致控制性能下降[8]。在已有多種克服抖振問題的方法中,最常用的方案是利用邊界層函數或一個近似的符號函數代替符號函數,來減弱在系統狀態接近滑模面時執行機構的控制作用,進而減少抖振現象[9-10]。但由于無人潛水器慣性較大,該方案的抖振減小效果是有限的。基于神經網絡算法的滑模控制器能夠產生連續信號從而可有取代邊界層的作用,因此可以有效消除抖振現象[11]。但是神經網絡算法需要大量數據支撐,在工程實際中有一定難度。
本文提出的通過調節輸出增益的變增益滑動模態控制器不僅可以抑制傳統滑動模態控制器的抖振現象,同時具有良好的動態和穩態性能。通過調節控制器輸出增益來實現控制力的調節,這樣可以在充分利用推進器推力的同時減小抖振現象。在此基礎上應用非線性狀態觀測器以實現對潛水器運動狀態的高頻觀測,從而提升控制信號的時效性,進而實現潛水器高度的有效控制。
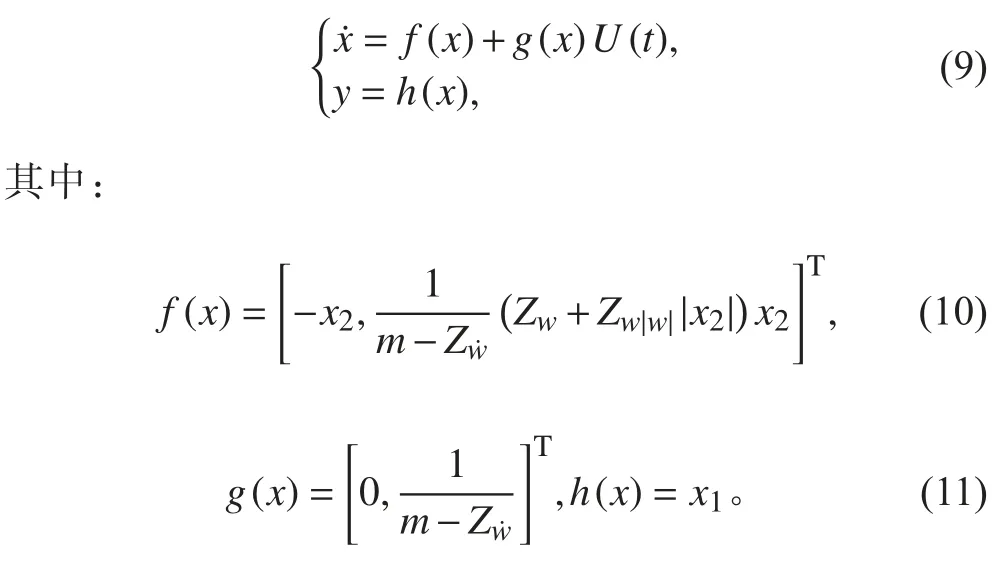
1 潛水器動力學建模
潛水器在一定的水深作業時,可以只考慮垂蕩運動,運動方程可寫為

其中:m為質量;w 為垂蕩速度;z為深度;Tz為垂向推力;為阻尼系數;為附加質量系數。
記水深為H,潛水器高度為h,則z = H-h,從而得到用高度描述的垂蕩運動方程

2 控制器設計及穩定性分析
高度控制系統由變增益滑動模態控制器和非線性狀態觀測器組成,結構如圖1 所示。其中變增益滑動模態控制器的輸入為高度偏差以及垂蕩速度估計值,輸出為推力信號;狀態觀測器輸入為高度計測量值,輸出為高度及垂蕩速度觀測值。
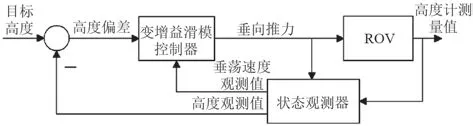
圖 1 控制系統結構圖Fig. 1 Structure of control system
需要指出的是,圖1 中變增益滑模控制器輸出的垂向推力需要轉換為垂向推進器控制電壓,該控制電壓再輸入到垂向推進器驅動器進而控制垂向推進器產生所需推力。由于推進器動態響應時間遠遠小于ROV本體垂蕩運動的動態響應時間,因此在控制器設計中忽略了推進器的動態特性。
2.1 變增益滑模控制器設計
由于滑動模態控制具有魯棒性強、對模型誤差不敏感、響應速度快等特點,因此其在非線性系統中已經有了較多的應用,可以用來解決潛水器參數不確定性和外部擾動不確定性帶來的控制問題。滑動模態控制器通過判斷系統狀態偏離滑模的程度進而進行切換控制,因此滑動模態控制器需要設計合理的切換函數和趨近律從而實現系統控制。
根據滑動模態控制理論,首先設計高度控制系統。
設計切換函數

其中:e = hd-h 為高度偏差;λ > 0 為指數收斂速度。
采用趨近率

由式(2)~式(4)可得控制律為

由式(5)可知,在滑動模態控制中,當切換函數進入邊界層之后,控制力Tz的改變使系統狀態不斷接近設計的滑模面。如果減小邊界層,控制力Tz可以快速變化,但執行機構會劇烈抖振,容易造成設備磨損,影響使用壽命。如果增大邊界層厚度,可以使控制力變化趨緩,進而減小抖振現象。但是隨著邊界層厚度的增加,垂向推進器無法得到充分利用。
針對該問題,本文在傳統滑動模態控制器的基礎上提出了輸出變增益的方法,即在原有控制輸出的基礎上引入可調節的增益,表達式為

其中增益σ 根據是否進入邊界層以及深度誤差是否小于設定范圍進行變化,即

2.2 變增益滑模控制器穩定性分析
由式(5)和式(6)可得

比較式(5)和式(8)可以看出,變增益控制Tz'和Tz有相同的表達形式,不同之處在于Tz'中的λ'和k'為可變正數,所以這不會影響其穩定性。
2.3 狀態觀測器設計
由式(8)可見,高度控制器需要垂向運動的狀態信息,即垂蕩速度以及高度。
對于僅配備高度傳感器的ROV 而言,由于高度計更新率較低且通常存在野值,基于高度差分得到的垂蕩速度存在較大失真。
為了克服此問題,引入狀態觀測器來對ROV 垂蕩運動的狀態進行估計,以得到高更新率和可靠性的高度及垂蕩速度反饋信息[12]。
應用文獻[12]單輸入單輸出的非線性狀態觀測器理論,設計狀態觀測器為
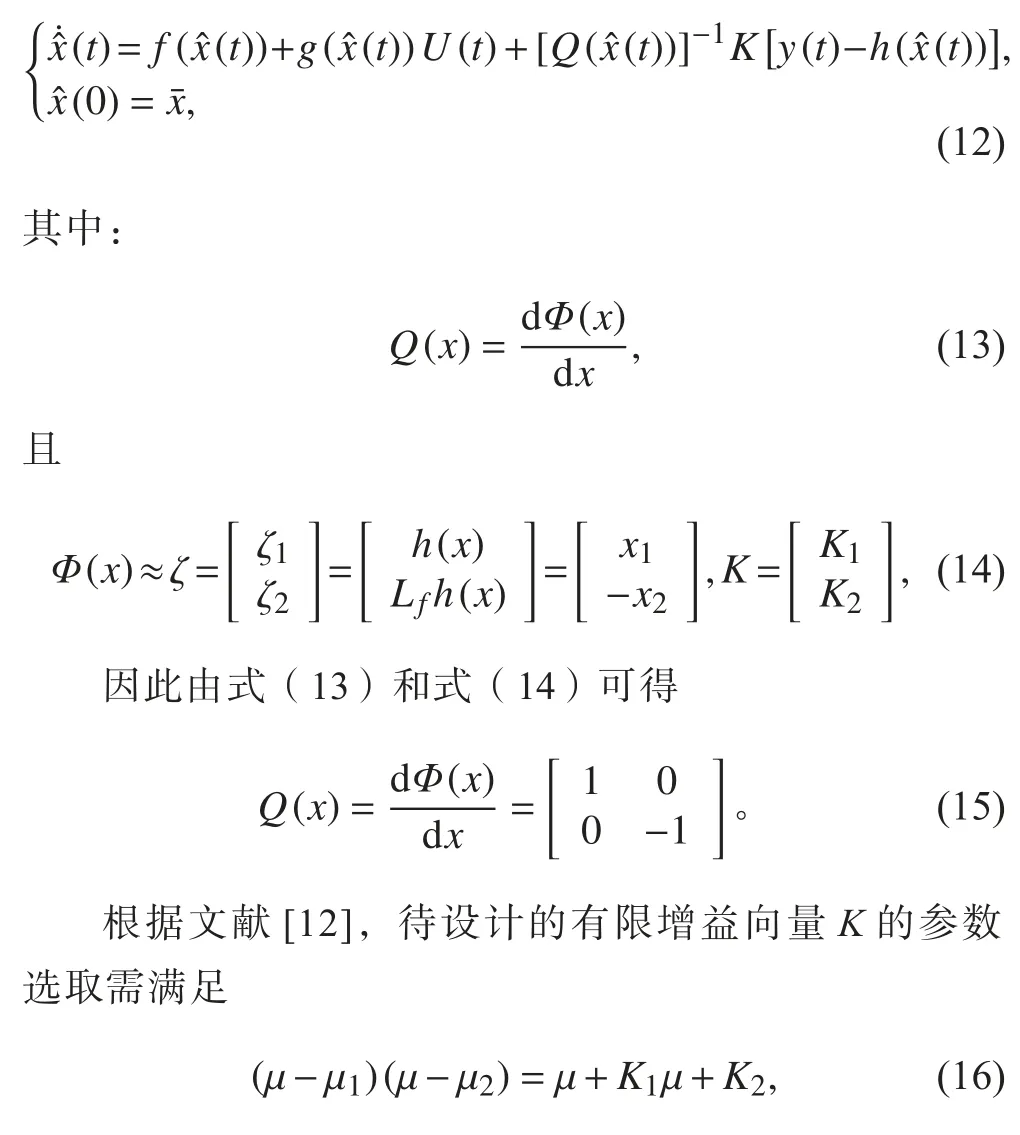
μ1和μ2根據Re{μi}<-γ,i = 1,2 選取后代入式(16)可計算得到K。γ 需滿足
3 實驗驗證
為了檢驗高度控制系統的控制性能,以DOE HD2+2 ROV(圖2)為試驗平臺在上海交通大學船舶海洋與建筑工程學院水下工程實驗室水池進行實驗。

圖 2 無人遙控潛水器DOE ROVFig. 2 DOE HD2+2 Remote Operated Vehicle
DOE HD2+2 ROV 的主要尺寸數據如表1 所示。該潛水器在水下具有零浮力,配有一個最大推力為7 kg的垂向推進器。此外還配有高度傳感器、慣性導航傳感器等設備,用于測量ROV 高度和姿態等數據。

表 1 無人遙控潛水器DOE ROV 的主要尺寸參數Tab. 1 Parameters of DOE ROV
基于計算流體力學(CFD)軟件計算得到DOE ROV 的水動力學系數等模型參數[13],如表2 所示。

表 2 無人潛水器DOE ROV 的主要水動力參數Tab. 2 Hydrodynamic coefficients of DOE ROV
根據推進電機動力學以及機翼理論可以計算得到推進器推力與控制電壓之間的非線性關系[14],如圖3所示。
實驗驗證可分為狀態觀測器的性能驗證和高度控制系統的性能驗證2 個部分。
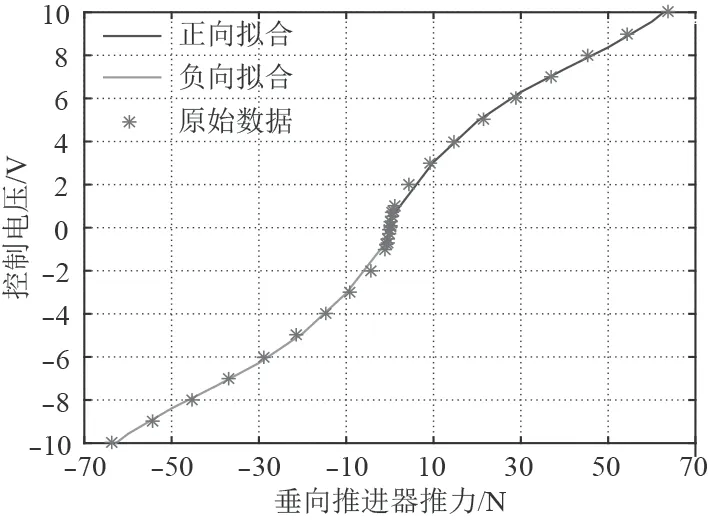
圖 3 控制電壓與推進器推力的關系Fig. 3 Forward and reverse propeller force applied voltage relations
3.1 狀態觀測器性能實驗驗證
從圖4 可以發現在水下實驗過程中,高度傳感器原始數據有非常明顯的缺失現象,在長達10 s 的時間內沒有有效數據。這是因為高度傳感器在潛水器運動狀態發生快速變化的時候產生了大量超出試驗水池尺寸的不合理數據,因此被剔除。高度傳感器不穩定性問題會對控制系統產生不利影響,因此狀態觀測器的反饋觀測數據回路成為控制系統不可缺失的一部分。從圖4 和圖5 中可以看出,ROV 的垂蕩速度狀態觀測器有效地提供了垂蕩速度信息;高度狀態觀測器不僅可以解決由野值導致的高度數據缺失,并提高了數據反饋頻率。
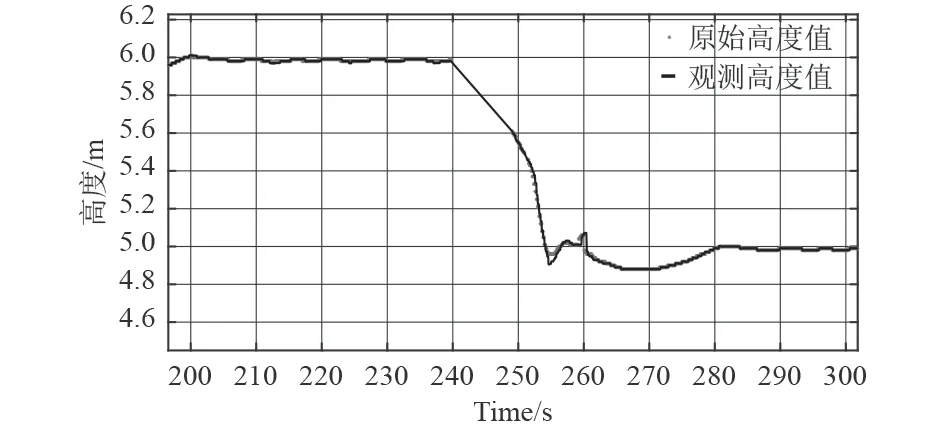
圖 4 狀態觀測器對ROV 高度的觀測效果Fig. 4 Experimental state observer results for altitude of ROV
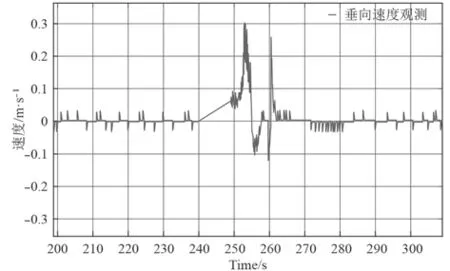
圖 5 狀態觀測器對ROV 垂向速度的觀測效果Fig. 5 Experimental state observer results for vertical speed of ROV
3.2 變增益SMC 高度控制性能實驗驗證
高度控制驗證過程可以分為2 個部分,即ROV 下潛定高和ROV 上浮定高。實驗過程中參數σ1取為1,參數σ2取為0.2,wmax取為2 m/s,部分實驗結果如圖6所示。從圖6(a)可以看出,ROV 在下潛前,即處于靜態控制過程時,其控制精度在1 cm 內。隨后將目標高度值由6 m 設定為5 m,ROV 進入動態調節過程約40 s 后高度值達到穩態,其控制精度在1 cm 左右。從圖6(b)可以看出,ROV 高度設定值從6 m 調至6.5 m后經過30 s,其高度進入穩態,誤差在2 cm 左右。垂向推進器的控制電壓信號輸出如圖7 所示,可以看出控制系統沒有出現嚴重的抖振現象,因此變增益方法改善了傳統滑動模態控制器的抖振問題。

圖 6 ROV 高度控制效果Fig. 6 Experimental altitude control results of ROV
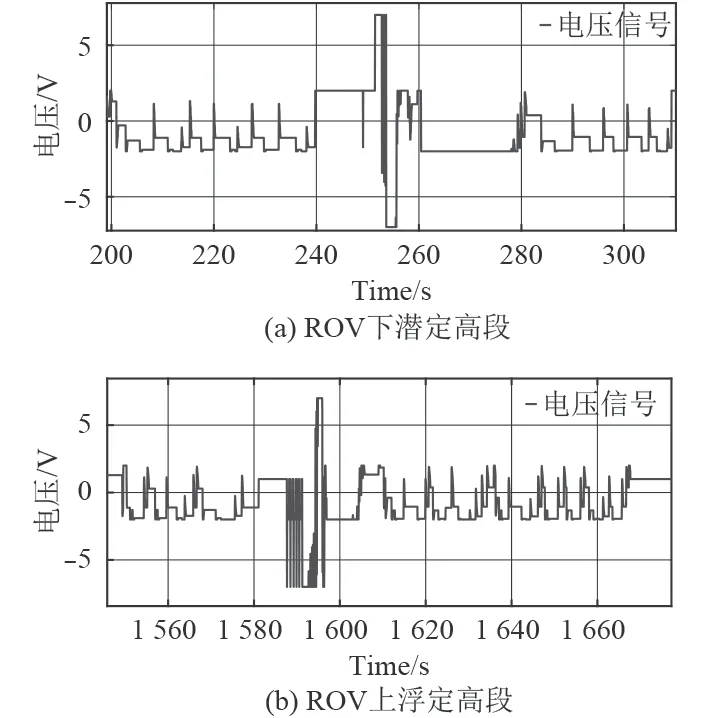
圖 7 垂向推進器控制信號輸入Fig. 7 Signal input of vertical thruster
4 結 語
本文以潛水器高度控制為研究對象,基于變增益滑動模態控制方法設計了高度控制系統,實驗結果表明該方法不僅有效地抑制了抖振現象,起到了降低執行機構(垂向推進器)機械損耗的作用。通過狀態觀測器觀測潛水器運動狀態,有效解決了傳感器更新頻率低的限制,從而加快了有效控制指令的輸出,進而提升了控制效果。通過水池控制試驗結果表明:1)垂向自由度的速度和高度狀態觀測器能夠較好地觀測出無人遙控潛水器的垂向速度和高度狀態;2)基于變增益滑動模態控制的高度控制系統能夠在實現高度的精確控制的基礎上大幅減少抖振現象。
猜你喜歡
成都信息工程大學學報(2022年4期)2022-11-18 07:31:14
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:12
工程與建設(2019年1期)2019-09-03 01:12:12
廣州大學學報(自然科學版)(2016年2期)2017-01-15 13:43:00
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
振動工程學報(2014年4期)2014-03-01 01:15:31
電影新作(2014年1期)2014-02-27 09:07:36