北斗三號觀測數(shù)據(jù)質量及定位精度初步評估
2019-09-05 08:52:44程軍龍馬立燁劉萬科
測繪通報 2019年8期
程軍龍,王 旺,馬立燁,劉萬科
(武漢大學測繪學院,湖北 武漢 430079)
北斗衛(wèi)星導航系統(tǒng)(BeiDou navigation satellite system,BDS)是我國自主研發(fā)、獨立運行的全球衛(wèi)星導航系統(tǒng)。在2012年底,已建成北斗二號區(qū)域系統(tǒng)(BDS- 2),向亞太地區(qū)提供導航定位和授時服務。至2018年10月7日,BDS- 2星座包括5顆地球靜止軌道(GEO)衛(wèi)星、7顆傾斜地球同步軌道(IGSO)衛(wèi)星及3顆中圓地球軌道(MEO)衛(wèi)星[1- 2]。2015年開始,我國開始了北斗三號(BDS- 3)全球衛(wèi)星導航系統(tǒng)的相關研制工作。從2015年初至2016年初,陸續(xù)發(fā)射了5顆BDS- 3試驗衛(wèi)星,引起了廣泛關注[3- 7]。隨后于2017年11月5日成功發(fā)射第一、二顆工作衛(wèi)星,標志著BDS- 3的組網(wǎng)工作正式開始。至2018年10月7日,在軌的BDS- 3衛(wèi)星已達14顆,目前均處于“測試”運行狀態(tài),但可以收到其中11顆衛(wèi)星播發(fā)的導航信號和廣播星歷,只是其健康狀態(tài)標識為“非健康”。BDS- 3衛(wèi)星的基本情況見表1[8]。按照計劃,至2018年底,建成由18顆MEO衛(wèi)星和1顆GEO衛(wèi)星組成的基本星座,服務于“一帶一路”沿線國家及地區(qū),并將于2020年建成由3顆GEO衛(wèi)星、3顆IGSO衛(wèi)星和24顆MEO衛(wèi)星組成的全球星座。此外,除了BDS- 2已經(jīng)播發(fā)的B1I、B3I頻點之外,BDS- 3的IGSO衛(wèi)星和MEO衛(wèi)星將新增3個頻點B1C、B2a、B2b,詳情見表2。

表1 BDS- 3衛(wèi)星星座的基本情況
注:對于MEO- 1衛(wèi)星,2018- 06- 12之前PRN號為C19,此后PRN號變?yōu)镃47;對于MEO- 8衛(wèi)星,2018- 06- 11之前PRN號為C28,此后PRN號變?yōu)镃48。
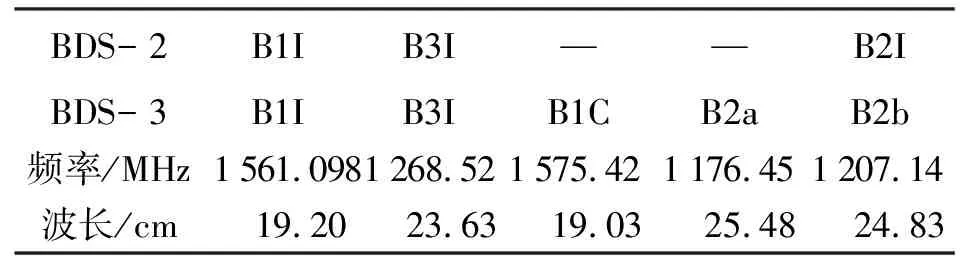
表2 BDS- 2/BDS- 3信號頻率及波長
衛(wèi)星導航定位的精度和可靠性很大程度上取決于導航衛(wèi)星的數(shù)據(jù)質量,這使得觀測數(shù)據(jù)質量評估成為全球衛(wèi)星導航系統(tǒng)建設和應用研究的一個重要方面。對于正在組網(wǎng)建設和即將投入應用的BDS- 3來說,數(shù)據(jù)質量評估尤為重要。文獻[9—11]對BDS- 2的觀測數(shù)據(jù)質量開展了較為深入的評估,取得了較為豐碩的成果。2017年文獻[7,12]評估了BDS- 3試驗星的觀測數(shù)據(jù)質量,但尚未有公開文獻對BDS- 3衛(wèi)星的數(shù)據(jù)質量和定位精度進行評估。因此,對BDS- 3衛(wèi)星的數(shù)據(jù)質量開展評估尤為必要,以期為BDS- 3即將到來的廣泛使用提供參考。本文將從載噪比、偽距多路徑及觀測噪聲3個方面對BDS- 3衛(wèi)星的觀測數(shù)據(jù)質量和特征進行評估,在此基礎上對BDS- 3參與單點定位和相對定位的性能進行初步分析。
1 觀測數(shù)據(jù)質量分析
本文主要從載噪比、偽距多路徑、觀測噪聲3個方面分析BDS- 3的觀測數(shù)據(jù)質量及其特征,并與BDS- 2進行對比。
1.1 數(shù)據(jù)概況
質量評估所用的觀測數(shù)據(jù)采集于2018年7月18日19時至7月20日19時,共48 h(在7月19日14—15時重啟過接收機),采樣間隔為10 s,截止高度角為5°。測站位于武漢大學測繪學院樓頂,周圍遮擋物較少,其上安裝了Trimble Zephyr Geomatic Model 2天線,并通過一分四信號功分器與4臺GNSS接收機相連,構成零基線。本次試驗采用的4臺GNSS接收機分別為2臺iGMAS型GNSS接收機(后文簡稱為KD接收機)和2臺M300 Pro型商用GNSS接收機,其中KD接收機可以接收BDS- 3的B1I、B3I、B1C、B2a、B2b信號,M300 Pro可以接收BDS- 3的B1I、B3I、B1C、B2a信號。對于BDS- 2,兩類接收機都可以接收B1I、B2I、B3I信號。此處需要說明的是,由于載噪比、多路徑誤差、觀測噪聲也與接收機有關,因此本文選取兩款不同類型的接收機進行分析,以使結果更具有參考價值。在本文試驗期間的衛(wèi)星跟蹤圖如圖1所示,可以看出,共觀測了7顆BDS- 3衛(wèi)星。
1.2 載噪比
載噪比(carrier noise ratio,C/N0)為信號功率與單位帶寬內的噪聲功率之比,是信噪比的一種歸一化表現(xiàn)形式,反映了信號在整個發(fā)射和接收過程中的增益與損耗。一般而言,載噪比越高表示觀測數(shù)據(jù)質量越好[13- 14]。
對BDS- 2與BDS- 3的載波比分析時,先對各MEO衛(wèi)星各頻點載噪比按照5°的高度角間隔取平均值,然后對所有MEO衛(wèi)星取平均值,可以得到KD接收機與M300 Pro接收機各頻點載噪比隨衛(wèi)星高度角的變化序列,如圖2所示。
由圖2可知,BDS- 2與BDS- 3各頻點載噪比都呈現(xiàn)出隨衛(wèi)星高度角增大而增大的趨勢,從低高度角的約35 dB/Hz增加到高高度角的約50 dB/Hz。
對KD接收機而言,BDS- 3衛(wèi)星的B1C頻點與BDS- 2的B1I頻點載噪比最低,其余頻點的載噪比較高且大小接近,這與文獻[7,12]中BDS- 3試驗衛(wèi)星的結論一致;而對共有的B1I、B3I頻點而言,BDS- 3衛(wèi)星的B1I比BDS- 2衛(wèi)星的B1I高3~4 dB/Hz,BDS- 3衛(wèi)星的B3I與BDS- 2衛(wèi)星的B3I相當。
對M300 Pro接收機而言,BDS- 2的B1I頻點的載噪比較低,其余頻點載噪比稍高且大小相當;而對B1I、B3I頻點而言,BDS- 3衛(wèi)星的B1I也比BDS- 2衛(wèi)星的B1I高3~4 dB/Hz,BDS- 3衛(wèi)星的B3I與BDS- 2衛(wèi)星的B3I相當,與KD接收機觀測數(shù)據(jù)的載噪比分析結果基本一致。
1.3 偽距多路徑效應
偽距多路徑是評價GNSS接收機觀測值質量的一種重要指標。通常可使用多路徑組合(MP)對偽距多路徑和噪聲進行綜合評估[14- 17]
(1)
式中,下標i和j(i≠j)代表不同的頻點;MPj為頻點j上的偽距多路徑與噪聲之和,單位為m;Pj為偽距觀測值;λi和λj為不同頻率載波波長;fi和fj代表不同頻率;φi和φj為不同頻率相位觀測值;Cij為模糊度項與硬件延遲項的組合,在無周跳的情況下認為是常數(shù)。MP組合觀測值消除了對流層延遲誤差、電離層延遲誤差及幾何相關誤差,但是仍然包含相位模糊度與硬件延遲誤差。在連續(xù)(沒有發(fā)生周跳)的觀測弧段內,可以通過減去整個弧段的平均值以消除常數(shù)項Cij,其殘差部分即可反映偽距多路徑與噪聲的影響。
KD接收機BDS- 2 C12和BDS- 3 C20衛(wèi)星的偽距多路徑隨高度角變化情況如圖3所示,BDS- 3各工作衛(wèi)星偽距多路徑RMS如圖4所示。M300 Pro接收機的相應統(tǒng)計結果如圖5、圖6所示,圖中有中斷現(xiàn)象,這是由于接收機重啟導致的。
由圖3、圖6可知,MP組合隨著衛(wèi)星高度角的增大而減小,并且主要波動在3 m以內。對于KD接收機,BDS- 3衛(wèi)星的B2a、B2b、B3I的MP組合比B1C、B1I頻點小,波動在1 m以內,與文獻[7,16]中BDS- 3試驗衛(wèi)星的結論一致,且BDS- 3衛(wèi)星的B3I與BDS- 2的B3I的MP組合波動基本相當。從圖5和圖6可以看出,對于M300 Pro接收機,BDS- 3的B1C頻點的MP組合波動最大,其他各頻點的MP組合波動基本相當,且總體上比BDS- 2衛(wèi)星各頻點波動稍大。此外,可以看出,BDS- 2 C12衛(wèi)星各頻點的偽距多路徑組合確實存在明顯與高度角相關的系統(tǒng)性偽距偏差[18],但BDS- 3 C20衛(wèi)星各頻點的偽距多路徑組合中未見明顯與高度角相關的系統(tǒng)性偽距偏差。經(jīng)分析其他BDS- 3衛(wèi)星,各頻點也不存在此明顯的系統(tǒng)性偏差。
從BDS- 2與BDS- 3所有衛(wèi)星的MP組合RMS的統(tǒng)計圖4和圖6可以看出,對于KD接收機,部分GEO衛(wèi)星的B1I頻點RMS較高,在2 m左右,其余衛(wèi)星各頻點MP組合RMS在1 m以內;BDS- 3衛(wèi)星各頻點RMS均在1 m以內,其中B3I、B2a、B2b頻點RMS較低,并且相差不大,都在0.2 m左右,而B1I和B1C的多徑RMS明顯大于其他3個頻點,分別在0.3~1.0 m和0.4~0.7 m之間。對于M300 Pro接收機,BDS- 2整體RMS在0.8 m以內,各頻點RMS也相差不大;BDS- 3 B1C頻點的RMS最大,在0.6~1 m之間,其他頻點相差不大,在0.3~0.6 m之間。
1.4 觀測噪聲分析
針對零基線觀測數(shù)據(jù),本文在衛(wèi)星和接收機間作二次差,消除了接收機鐘差、衛(wèi)星鐘差、硬件延遲、電離層延遲、對流層延遲及多路徑等誤差的影響,以便直接反映接收機的噪聲水平。
圖7、圖8給出了KD接收機BDS- 3衛(wèi)星對C22- C21與BDS- 2衛(wèi)星對C09- C14(僅選取具有代表性的一組)的雙差偽距噪聲及相位噪聲,圖中在GPST 3.91×105—3.94×105s處有中斷,這是由該時段接收機重啟導致的。
由圖7、圖8可知,KD接收機各頻點的雙差偽距噪聲波動在0.05 m以內,雙差相位噪聲波動在0.01周以內,該結果與文獻[7,12]對BDS- 3試驗衛(wèi)星的研究結果一致;另外,KD接收機BDS- 3衛(wèi)星的偽距與相位噪聲水平與BDS- 2衛(wèi)星基本相當。
對于零基線來說,可以在雙差噪聲的基礎上通過除以2簡單折算出KD接收機和M300Pro接收機非差觀測值的偽距和相位噪聲。表3、表4給出了BDS- 2和BDS- 3所有衛(wèi)星各頻點的非差觀測值噪聲RMS統(tǒng)計結果。從表3、表4和圖7、圖8所給出的接收機觀測噪聲分析結果來看,新信號中B1C要比B2a、B2b的偽距噪聲稍大,老信號中B1I的偽距噪聲比B2I和B3I要大。
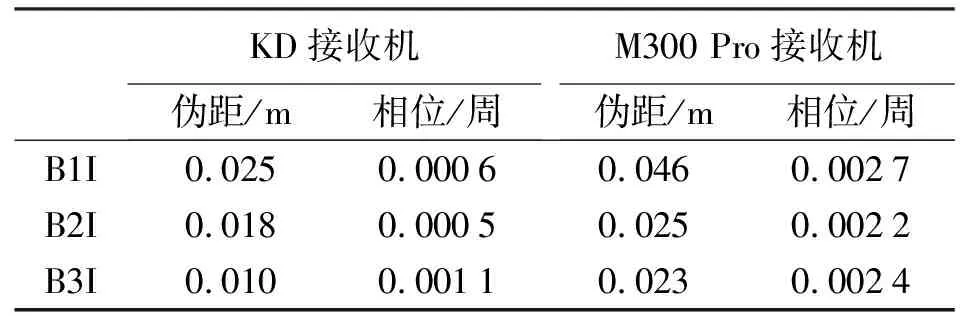
表3 BDS- 2衛(wèi)星各頻點非差觀測值噪聲RMS
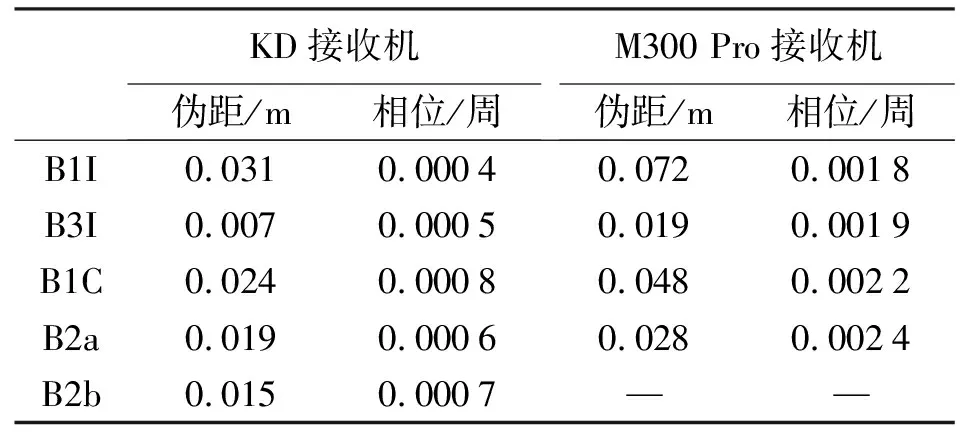
表4 BDS- 3衛(wèi)星各頻點非差觀測值噪聲RMS
2 定位結果分析
觀測數(shù)據(jù)的好壞直接影響導航定位的性能。本節(jié)對BDS- 3衛(wèi)星參與導航定位的性能進行了初步評估,同時也可以進一步評估觀測數(shù)據(jù)的質量。此處設計了兩類方案分別進行偽距單點定位和短基線相對定位解算,并將兩類方案的解算結果進行對比分析,其中第一類方案僅使用BDS- 2衛(wèi)星,第二類方案使用BDS- 2與BDS- 3衛(wèi)星進行聯(lián)合解算。
試驗數(shù)據(jù)采集于2018年7月30日UTC時7:10—20:25,共13 h 15 min,采樣間隔為10 s。基準站和流動站均架設于武漢大學測繪學院樓頂,使用2個Trimble Zephyr Geodetic Model 2天線,并分別連接一臺司南M300 Pro接收機,構成一組短基線,基線長為3.83 m。相應的共視衛(wèi)星數(shù)和PDOP值序列如圖9所示,可以發(fā)現(xiàn)增加BDS- 3衛(wèi)星后,單個歷元最多增加4顆衛(wèi)星,平均衛(wèi)星數(shù)從8.8變?yōu)?0.9,平均PDOP從2.5減小為2.0,空間幾何構型得到增強。本文采用武漢大學測繪學院研制的GNSS高精度定位、測速和測姿軟件KinPOS v2.0進行解算,該軟件可以處理GPS/BDS/GLONASS/Galileo的單/多頻觀測數(shù)據(jù),獲取高精度的位置解算信息。
2.1 單點定位結果
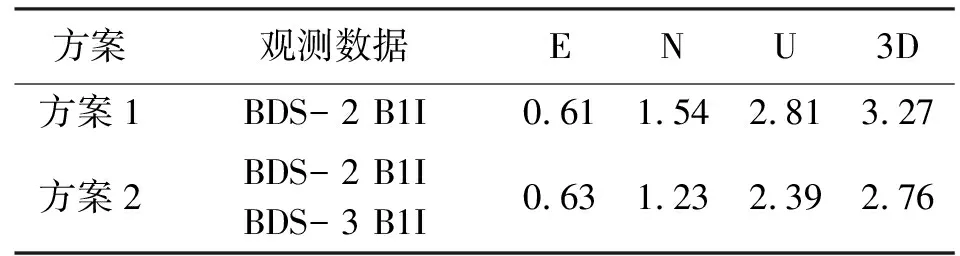
采用兩種不同方案對基準站進行偽距單點定位解算,E、N、U方向的誤差序列如圖10所示,其RMS統(tǒng)計值見表5。其中,解算時僅使用B1I頻點的觀測數(shù)據(jù);截止高度角設為10°;坐標的參考值采用武漢大學測繪學院研制的TriP軟件進行精密單點定位解算得到。此外,考慮到BDS- 2工作衛(wèi)星和BDS- 3衛(wèi)星間存在系統(tǒng)性的時間偏差,在解算時需要將BDS- 2和BDS- 3的接收機鐘差視為兩個參數(shù)進行估計,其估值序列如圖11所示,可以看出兩者之間確實存在50 ns左右的偏差。
m
由圖10及表5中的統(tǒng)計結果可知,增加BDS- 3衛(wèi)星后,方案2相比方案1在E、N、U方向上的定位精度分別由0.61、1.54、2.81 m提升至0.63、1.23、2.39 m;三維位置精度由3.27 m提升至2.76 m。此外,在圖10中可以發(fā)現(xiàn)存在兩處跳躍(GPST 1.32×105s與1.5×105s處),對照圖9可以看出,這是由于BDS- 3衛(wèi)星的升降導致PDOP值出現(xiàn)較大的跳躍,進而導致定位結果上存在一定的跳躍。以上結果表明,相比僅使用BDS- 2工作衛(wèi)星,增加BDS- 3衛(wèi)星可以在一定程度上增強圖形結構,進而提高偽距單點定位精度。
2.2 相對定位結果
分別采用方案1和方案2進行短基線相對定位解算,解算結果E、N、U方向RMS統(tǒng)計值見表6。其中,解算時BDS- 2衛(wèi)星始終使用B1I、B3I頻點的觀測數(shù)據(jù),方案2的BDS- 3衛(wèi)星分別使用B1I、B3I頻點與B1C、B2a頻點的觀測數(shù)據(jù);截止高度角設為10°;基線分量的參考值使用商用處理軟件CGO按照靜態(tài)整體解算得到。
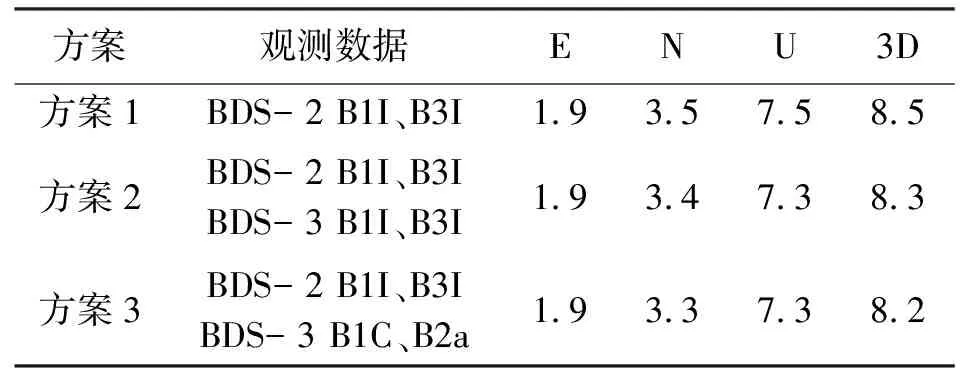
表6 短基線相對定位解算精度RMS mm
由表6中的統(tǒng)計結果可知,相比方案1,方案2與方案3的N、U 2個方向及三維的統(tǒng)計精度均有1~2 mm的提升。以上結果表明,相比僅使用BDS- 2衛(wèi)星,增加BDS- 3衛(wèi)星之后可以取得相當甚至更高的短基線相對定位精度,這說明BDS- 3衛(wèi)星的觀測數(shù)據(jù)正常,可以參與并實現(xiàn)精密定位。
3 結 語
本文基于iGMAS型GNSS接收機和商用GNSS接收機的實測觀測數(shù)據(jù),首先從載噪比、偽距多路徑、觀測噪聲3方面對BDS- 3衛(wèi)星的觀測數(shù)據(jù)質量進行了初始評估,并與BDS- 2進行了對比分析;在此基礎上,從單點定位和短基線精密相對定位兩方面,對僅使用BDS- 2的定位精度和增加BDS- 3衛(wèi)星后的定位精度進行了對比分析。主要結論如下:在載噪比方面,BDS- 3衛(wèi)星的B1I頻點比BDS- 2的B1I頻點高3~4 dB/Hz,BDS- 3衛(wèi)星的其他頻點大小相當;在偽距多路徑方面,BDS- 3衛(wèi)星的B2a、B2b和B3I與BDS- 2的B3I大小相當,BDS- 3衛(wèi)星的B1I和B1C與BDS- 2的B1I、B2I大小相當,且BDS- 3各頻點的偽距多路徑組合中不再存在明顯的與高度角相關的偽距偏差;在觀測噪聲方面,BDS- 3衛(wèi)星與BDS- 2衛(wèi)星各頻點大小基本相當,偽距的非差噪聲精度為厘米級,相位噪聲精度總體上優(yōu)于0.002周。相較于僅使用BDS- 2衛(wèi)星,增加BDS- 3衛(wèi)星可以增強定位的幾何圖形結構,進而提高偽距單點定位精度,取得相當甚至更高精度的相對定位結果,說明BDS- 3衛(wèi)星是可以參與并實現(xiàn)精密定位的。
綜合本文的初步評估結果來看,BDS- 3衛(wèi)星擁有與BDS- 2相當甚至更高的數(shù)據(jù)質量,且偽距中不存在明顯的衛(wèi)星端多徑偏差,加入BDS- 3衛(wèi)星后,改善了BDS- 2的幾何圖形結構,也有望在一定程度上提高定位精度。本文可為后續(xù)針對BDS- 3衛(wèi)星的相關研究提供參考。
