基于EMD和RBF神經網絡的大壩形變預測
2019-09-05 08:52:36劉思敏徐景田鞠博曉
測繪通報 2019年8期
劉思敏,徐景田,鞠博曉
(1. 中國地質大學(武漢)信息工程學院,湖北 武漢 430074; 2. 武漢大學測繪學院,湖北 武漢 430079)
全球衛星導航系統(global navigation satellite system,GNSS)能夠同時測量多個觀測點位的高精度三維變形,隨著其硬件及軟件的不斷發展和完善,GNSS在結構物變形監測方面表現出獨特的優勢。已有研究表明,利用4 h觀測數據進行基線解算,可實現水平和垂直方向精度分別優于1.5、2 mm[1]的目標。
大壩在運營過程中會發生一定程度的變形沉降。基于實測高精度變形時間序列,對變形機理進行解析,進而建立準確的預測模型對其變形趨勢進行推估,其結果對于大壩的安全監測與預警具有重要價值。目前,已有許多國內外學者在大壩變形預測領域展開了研究。在常用的方法中,BP神經網絡易陷入局部最小值,訓練效果對于網絡結構非常敏感[2- 3];灰色模型、支持向量機法在歷史觀測數據樣本較大時的預測效果不佳;奇異譜分析法需要相關數據,如水位、溫度等[4- 7]。
GNSS大壩變形數據時間序列具有明顯的多尺度特征,且可視為非平穩時間序列[5]。本文擬采用經驗模態分解[8](empirical mode decomposition,EMD)與徑向基函數(radial basis function,RBF)神經網絡進行大壩變形預測。EMD具有多分辨率及自適應性的特點,能夠較好地處理隨機非平穩信號,與小波變換及其他時域分析方法相比,不受小波基選擇和分解層數的影響,可廣泛應用于時間序列分析、降噪領域、懸索橋動力特性分析[9- 11]。RBF具有最佳逼近及全局最優的優點,同時可快速迭代訓練,因此在非線性時間序列的預測中有廣泛的應用,在混沌時間序列預測、電力系統短期負荷預測、股票價格預測、肝移植存活率預測[12- 15]中均得到了較好的處理結果。綜上,兩者結合可以達到很高的預測精度和良好的泛化能力。
本文利用西龍池上水庫位于主壩上的測點L022的2012年3月—2014年1月共680 d的觀測數據,使用武漢大學自主研發的變形監測軟件DDMS解算獲得測站各方向的坐標時間序列[1];然后,使用本文所提出的預測模型進行大壩變形預測,并通過與實測變形數據進行對比,分析兩者差值的均方根誤差(RMSE)和平均絕對誤差(MAE),以評價本文模型的預測效果。經實例分析,該模型預測精度高,泛化性能好,受數據精度影響較小,自動化程度高。
1 預測原理與方法
1.1 EMD基本原理
EMD是基于非線性、非平穩數據的自適應時頻信號分解方法,通過數據的特征時間尺度來獲得本征波動模式,然后分解數據,將原始時間序列分解為一系列由高頻到低頻的本征模態函數分量(intrinsic mode functions,IMFs)和殘余項。
對于信號X(t),EMD利用所有的局部極值來構建包絡線并確定包絡平均值m(t),進而求臨時局部震蕩值h(t)=X(t)-m(t),利用得到的臨時局部震蕩值h(t)代替信號X(t),重復以上步驟并進行循環,直到m(t)的值近似為零,則h(t)即為第1個IMF分量,記為c(t),計算殘余項r(t)=x(t)-c(t),利用r(t)代替信號X(t)重復上述步驟,繼續求下一個的IMF分量和殘余項。
最后,原始信號X(t)經K次分解后可表示為
(1)
式中,rK(t)表示殘余項;ci(t)表示第i個IMF分量。
1.2 RBF神經網絡基本原理
隱含層的輸出為非線性激活函數hj(t)
(2)
式中,bj為一個正標量,表示高斯基函數的寬度;m為隱含層的節點數量。網絡的輸出由如下加權函數實現
(3)
式中,w為輸出層的權值;n為輸出節點個數;y為神經網絡輸出。
1.3 基于EMD和RBF神經網絡的大壩預測模型
本文僅對大壩進行短期的變形預測,具體流程如下:首先從原始數據中通過最小二乘法去除趨勢項,得到新時間序列{X(t)},對新序列進行自適應經驗模態分解,得到不同尺度的IMF和殘余項,采用RBF神經網絡根據高、低頻IMF采用不同的步長分別預測n個IMF和殘余項,最后疊加各尺度下的預測結果,獲得大壩變形預測值。本文數據處理流程及預測模型結構如圖2所示。
2 工程實例分析
本文以西龍池上水庫GNSS大壩變形監測系統為例,選取水庫主壩體L022號GNSS監測點2012年3月—2014年1月共680 d的變形時間序列進行建模,數據處理采用DDMS軟件,采用4 h時段靜態解算模式,共4080期數據。以1~4000期數據建立RBF神經網絡進行網絡訓練;以4001~4080期數據作為試驗數據。RBF神經網絡的迭代次數為1000,神經網絡結構為24- 1- 1或48- 1- 1,即輸入層的節點數為24或48,隱含層為1,輸出層為1。為降低建模誤差,神經網絡訓練前對4080期數據均進行歸一化處理,預測后反歸一化為真實預測值。
本文首先使用最小二乘法去除原始時間序列中的趨勢項,由于三階擬合能較好地擬合出變形趨勢,因此筆者認為最小二乘三階擬合結果為時間序列的趨勢項。圖3中黑線為原始時間序列,灰線為去趨勢項后的時間序列{X(t)},去趨勢項后可以更加準確地看出時間序列的周期性波動。
然后進行歸一化處理,并通過EMD分解時間序列, 分解結果如圖4所示。 EMD基于信號本身特點將信號自適應地分解成9個尺度的IMF,時間序列中隱含的不同周期信號被分解成不同尺度的信息。
采用RBF分別預測各IMF和殘余項,得到各IMF和殘余項的預測值,然后疊加各尺度下的預測結果,獲得大壩變形預測值。N、E、U 3個方向的預測結果及誤差如圖5(a)—(c)和表1所示。實測值與預測值在N方向最大誤差為2.6 mm,E方向最大誤差為1.3 mm,U方向受數據本身精度影響,有異常值存在,最大誤差為8 mm,3個方向的RMSE分別為0.878 6 mm(N)、0.360 4 mm(E)和2.235 mm(U),且預測期數越短,誤差越小。3個方向的高頻部分預測值與實測值吻合度較好,能明顯預測出高頻的走勢。
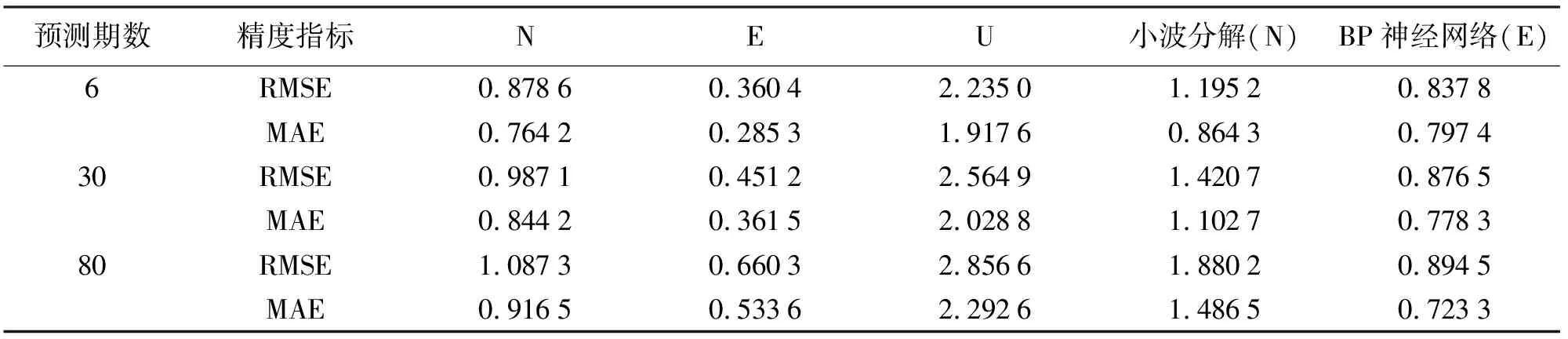
表1 L022號站3個方向的RMSE與MAE mm
為比較EMD方法與小波分解方法在預測準確性上的差異,分別使用兩種方法對N方向的變形時間序列信號進行分解,對分解后的各個分量使用RBF進行預測,并對比其預測精度,結果如圖5(a)、(d)及表1所示。由圖1可知,使用EMD方法對信號進行分解,明顯比小波分解的預測精度更高,高頻部分符合更好。通過表1對比兩者預測結果,本文使用的方法在不同預測期數下的預測精度均明顯高于小波分解。
為了評價本文預測方法的整體預測效果,選用BP神經網絡與本文預測模型的預測結果進行對比。以E方向為例進行對比試驗,兩種預測方法的預測結果如圖5(b)、(e)及表1所示。本文預測方法最大誤差為1.3 mm,高頻部分和低頻部分都與實測值符合較好,能較為準確地反映真實的變形信息;BP方法預測結果的最大誤差為2.7 mm,低頻趨勢預測結果較好,但高頻部分不能準確預測。RBF預測結果的MAE、RMSE較BP分別最高可提高63%、57%。
3 結 語
隨著GNSS自動化變形監測技術在大壩、滑坡、橋梁等領域的廣泛應用,基于大數據、神經網絡等理論和方法的變形預測已成為當前的一大研究熱點。本文針對GNSS大壩變形時間序列的預測問題,提出了一種結合EMD與RBF神經網絡的預測大壩變形的新方法。經對比試驗表明,該方法的預測值與真實值在N、E、U 3個方向的RMSE分別為0.878 6、0.360 4和2.235 mm,具有很高的預測精度和良好的泛化能力。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中華詩詞(2020年1期)2020-09-21 09:24:52
電子制作(2018年11期)2018-08-04 03:25:42
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
Coco薇(2015年1期)2015-08-13 02:47:34
