三維激光掃描技術在異型建筑物施工軸線檢測中的應用
2019-09-05 08:48:50徐亞軍謝海榮袁小軍車紅磊
測繪通報 2019年8期
關鍵詞:施工
徐亞軍,謝海榮,袁小軍,車紅磊
(南通市測繪院有限公司,江蘇 南通 226006)
隨著城市建設不斷加速,各城市爭相建設形式多樣的標志性建筑,使得外形新穎、構造獨特的異形建筑涌現在各個城市的新區、新城、CBD。異型建筑在給人們帶來視覺享受的同時,給建設施工、質檢驗收也帶來了新的難度和挑戰,異型建筑特征點難以選取,內業成圖各構筑物要素不易表達,難以全面反映異型建筑在空間的連續變化情況[1- 2]。
三維激光掃描技術又稱“實景復制技術”,是一種新型全自動高精度立體掃描技術,可以在復雜的現場環境中進行掃描操作,為異型建筑檢測測量提供了有效的解決方案。它突破傳統的單點測量模式,以點云的形式采集并保存空間物體表面的三維幾何信息和紋理數據,進而快速重構出實體目標的三維模型及點、線、面、體、空間等各種數據,通過海量點云數據進行各種尺寸量算[3- 5]。
南通中央商務區某幢建筑物是非常典型的異型結構建筑物(如圖1、圖2所示),該幢建筑物共計30層,屋面高度為128.75 m,結構已封頂;其軸柱為圓柱,每根軸柱由1層至30層,總體呈“S”形,在每層分布有軸柱16根,每根柱直徑、傾斜角度均不一致。本文以該建筑軸柱檢測為例,介紹如何應用三維激光掃描儀進行異型建筑物施工軸線檢測,為其他類型建筑物提供借鑒。
1 外業數據采集
1.1 控制點布設
為保證各層掃描數據具有較高精度的絕對坐標及內符合性,綜合考慮該建筑周邊地形、地貌等情況,采用自由坐標系布設控制點,在該建筑物9層和該建筑物東南約140 m處建筑物26層分別選取1個點位,作為整個項目的平面控制點。
在建筑物每層選取一個工作基點,以新布設的平面控制點采用極坐標法進行點位觀測,為減少測距、測角帶來的影響,每層工作基點均選取在上下樓層相對應的位置。
利用每層的工作基點和平面控制點,在每層布設不少于3個測量控制點,并采集三維坐標[6- 7]。
1.2 施工軸線聯測
利用1層布設的工作基點,采用極坐標法采集施工軸線的坐標,建立施工坐標系與自由坐標系之間的位置關系。
1.3 測站布設
本項目以層為單位進行三維激光外業掃描,掃描對象為各層16根軸柱(如圖3所示)。掃描前先對每層的環境進行踏勘,清理柱子周邊障礙物,去除障礙物噪點;同時確定掃描儀和標靶球布設的位置,確保軸柱點云完整性,保證有足夠的點云數據反映軸柱的空間位置和姿態。
掃描時對儀器進行整平,為確保測量的精度要求,將掃描分辨率設置為高檔,每站掃描結束后,現場檢查數據掃描質量,對不合格的進行重新掃描。為了保證后續工作順利完成,在測站上做好觀測記錄,確認相關工作無誤后,儀器移到下一測站進行掃描。
1.4 標靶布設
本次掃描采用的是球形標靶和平面標靶。外業數據采集時,在掃描對象附近至少擺放3個球形標靶,相鄰兩掃描站的公共標靶個數不少于3個,同時根據需要對球形標靶進行了精掃。為了提高點云精度,每層均采取閉合環方式進行掃描作業。
2 內業數據處理
2.1 點云配準
由于各測站有至少3個公共的球形標靶,故采用Trimble RealWorks軟件自動提取球形標靶中心[8],實現點云自動配準,配準殘差在1 mm左右,如圖4所示。
將配準后的點云數據通過控制點轉換,統一到自由坐標系下。各層掃描數據配準精度見表1。
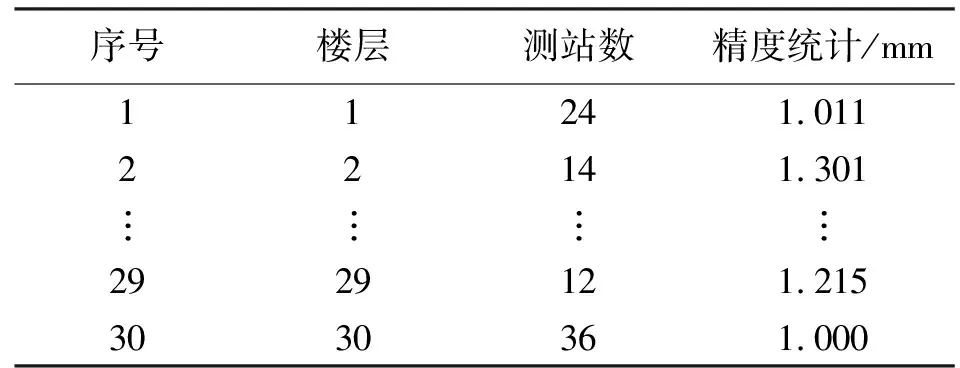
表1 各層測站數與配準精度
2.2 精度驗證
由施工軸線聯測建立的施工坐標系與自由坐標系之間位置關系,將自由坐標系下的點云統一到施工坐標系中,為確保軸柱檢測數據的精度,須對獲取的點云數據進行精度驗證。本文對該異型建筑物核心筒檢測坐標與設計坐標進行對比,驗證核心筒的平面絕對位置精度[9],來評估點云數據的可靠性。核心筒檢測值與設計值較差中誤差為11 mm,具體見表2。

表2 核心筒平面絕對位置精度統計
2.3 軸柱柱底圓心獲取
根據采集的點云數據,對每層每個軸柱建立三維模型,主要提取每個軸柱的點云,自動擬合最符合實際情況的圓柱,提取圓柱軸線,再求出圓柱軸線與樓層結構地坪平面的交點坐標,即軸柱柱底圓心坐標。如圖5所示。
2.4 設計比對
根據建立的施工軸線與自由坐標系間的位置關系及委托方提供的施工圖紙, 推算出每層每個柱子與樓層結構地坪相交面的圓心坐標,并與設計圓心坐標進行對比,計算坐標分量偏差,最終數據應歸算至施工坐標系下,具體成果見表3。其中較差ΔX為正表示測量柱底圓心較設計位置偏北,反之偏南;較差ΔY為正表示測量柱底圓心較設計位置偏東,反之偏西。
3 結 語
三維激光掃描技術是一種實景復制技術,其具有非接觸、全自動數據獲取速度快,精度高的優勢。本文將三維激光掃描技術應用于異型建筑物施工軸線檢測中,可獲取異型建筑物完整點云,這是傳統測量手段無法實現的,并通過精度評估,在生產中驗證了其可行性與可靠性,為三維激光掃描技術在工程中的應用積累了經驗,后續提高數據處理自動化水平是進一步研究方向[10]。

表3 異型建筑物某層柱體垂直度檢測成果
猜你喜歡
建材發展導向(2022年18期)2022-09-22 07:13:20
建材發展導向(2022年12期)2022-08-19 02:33:10
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年22期)2022-01-18 06:12:46
建材發展導向(2021年19期)2021-12-06 03:20:50
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年12期)2021-07-22 08:06:58
建材發展導向(2021年9期)2021-07-16 07:11:36
上海建材(2017年4期)2017-10-16 01:33:34
中國房地產業(2016年2期)2016-03-01 01:25:48
