曲率約束的激光點云全局優化配準算法
2019-09-09 09:16:46馬偉麗王健孫文瀟
遙感信息 2019年4期
關鍵詞:特征
馬偉麗,2,王健,孫文瀟
(1.山東科技大學,山東 青島 266590;2.山東省水利勘測設計院,濟南 250101)
0 引言
在物體表面三維重構[1]中,點云數據配準是最為重要的步驟。使用三維激光掃描技術[2-3],可以得到被測物體表面點云數據,通過在多個視角下測量的點云數據,然后對多測站數據進行配準,最終獲得完整的三維物體模型。點云數據配準精度,對三維物體模型重構和應用有著直接的影響。
目前,國內外提出了很多數據配準的算法,其中使用最為廣泛的算法就是1992年Besl等[4]提出的迭代最近點算法(ite-rative closest point,ICP)以及它的改進算法[5-6]。為了使數據配準的結果更加準確,ICP算法使用時必須要滿足2個條件:點云之間存在包含關系、點云之間初始位置不可以相差過大。數據配準常用方法有:特征點提取法[7-10],根據曲率特征、法向量等信息提取特征點,由得到的特征點對完成配準;質心重合法[11],計算點集的質心,并將2個點集作相對于質心的平移;標志點法[12-13],人工粘貼標志點,通過標志點配準。上述配準方法,對點云間位姿和噪聲程度有嚴格要求,同時容易陷入局部最優。
針對上述點云數據在配準中存在的問題,本文采用散亂點云建立的曲率信息研究點云的配準方法,在基于曲率特征配準的基礎上,引入現在比較成熟的模擬退火法(simulated annealing,SAA)對點云數據拼接誤差的參數進行尋優,避免局部最優。因此提出基于隨機抽樣一致性算法(random sampling consensus,RANSAC)提取曲率特征點,然后用距離最近原則尋找對應點對,最后使用模擬退火法防止陷入局部最優完成最終配準。
1 經典ICP算法
經典ICP算法[14]利用最小二乘最優匹配原理,通過迭代進行點云之間的剛體變換。首先已知兩塊待配準的重疊點云M和N,其中M為待配準點云,N為參考點云。M點集中的每一點Mi以最小距離原則在N中尋找對應點,對應點構成新的點集。所有對應點對的拼接誤差[15]
(1)
式中:Mi為目標點集;Ni為待配準點集;n為匹配點對總數;λ、R、T分別表示點集M與點集N之間剛體變換的縮放參數、旋轉參數、平移參數。反復迭代求出滿足式(1)且收斂于給定閾值的轉換參數,即為ICP算法配準的最終目的。ICP算法過程描述如下:
①尋找對應點對M’、N’;
②計算配準轉換參數λ、R、T;
③修正待配準點云M得到新的點云M’;
④計算相鄰兩次迭代點集的距離差值di,點對匹配均方差收斂于閾值τ,即di-di+1<τ,則停止迭代,否則令i=i+1,并返回步驟①。
2 改進ICP算法
2.1 曲率特征點集的提取
數據配準時,對于待配準點云M和基準點云N,如果對所有點云進行匹配點的搜索,會非常繁瑣且浪費時間,同時因為噪聲的存在也會對特征點的選取產生影響。本文在進行曲面擬合局部點云時,加入RANSAC算法,以消除噪點的影響,最后利用曲率極值法來提取曲率特征點。
在三維歐幾里得空間中,幾何體結構的特征主要由曲率和法矢量來描述[16]。曲率是一種不隨平移、旋轉、縮放變化的特征,該特征可用高斯曲率KG、平均曲率KM、主曲率k進行描述,首先引入曲率度量公式[17]
(2)
(3)
式中:k1代表最大曲率;k2表示最小曲率;α代表度量曲率相似度。通過公式(2)、公式(3)度量曲率相似度,提取出具有相似結構的點云,然后配準2片點云。特征點提取的具體步驟描述如下:
①選任意一點為種子點,選取K領域計算包含的點個數,計算迭代次數L[18]由式(4)得出:
(4)
(5)
式中:A為點云數;a為擬合曲面方程所需最小點個數,在本文中a=6,P為a個點均為有效點的概率;ε是數據的錯誤率,表示局外點與總數據量之比。
②對點云任意一點,建立鄰域點集合,設曲面方程[19]為
(6)
在K鄰域內隨機選取a個點,計算Qij的初始參數。
④重復步驟②~③,直到循環次數達L次,找到最大局內點,由參數曲面方程解出最優參數Qij。
(7)
(8)
⑥由求得的高斯曲率與平均曲率可直接求解主曲率
(9)
(10)
⑦判斷該點主曲率k1或k2在對應的主方向上是否為極值,若為極值,則保留該點,進行下一個種子點判斷。重復步驟⑦~⑧,直到遍歷完所有的數據。
⑧曲率極值越大特征越明顯。為曲率極值設定一個閾值ω,大于該設置閾值則保留曲率特征點,反之刪除。選取曲率特征點集流程圖如圖1所示。
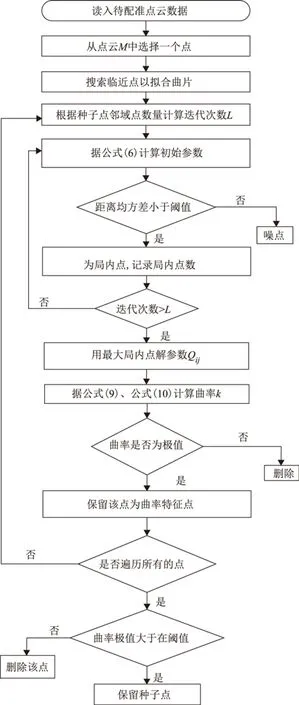
圖1 選取曲率特征點集流程圖
2.2 獲取全局最優轉換參數
配準的過程即是求解待配準點云到基準點云的縮放參數λ、剛性旋轉R和平移T的過程。待配準點云M中的A點和基準點云N中的B點,表示的是地球表面物體的同一個點,可以通過縮放、旋轉和平移變換把A點和B點重合在一起。A點坐標XA,YA,ZA,B點坐標XB,YB,ZB,轉換的公式為:
(11)
在實際測量中,點云的采集不可避免帶入噪聲,雖然根據曲率特征選取特征點,以距離最近為判斷依據獲得相對應的特征點對,但是點云間數據沒有絕對的一一對應關系,因此引入模擬退火法,得到使目標函數最小的最優轉換參數λ、R、T,避免配準時出現局部最優解。目標函數的形式多樣化,本文使用拼接誤差公式(1)作為目標函數。
在1953年,Metropolis[20]等率先提出了模擬退火法。模擬退火法是一種非線性反演,能夠避免使反演陷入局部極大值,是一個不斷尋優的過程。在此過程中,擬合度隨迭代次數的增加呈現一種跳躍起伏的現象,但總體的趨勢是變小或變大,然而正是由于模擬退火允許擬合誤差變大或擬合度變小,進而使得模型從局部的最優值中跳出來,最終得到全局的最優化模型。因此引入模擬退火法,在點云拼接過程中以拼接誤差Eλ,R,T為目標函數,進行優化求解。
在模擬退火法的迭代過程中,要求溫度隨著迭代次數的增加而緩慢降低,由冷卻進度表控制溫度t的逐步下降,同時依概率接受惡化解。接受概率參數是關于溫度t的函數,隨著t不斷的降低,接受概率也不斷降低,直到最后不再接受任何惡化解。本文采用雙曲下降型[21]退火方案。模擬退火法尋找轉換參數的最優具體解步驟:
①初始化目標函數模型參數λ0、R0、T0,確定參數變化范圍,選擇初始溫度t0=1°。
②計算目標函數值E0λ0,R0,T0。
③對當前模型參數進行擾動,產生新的模型參數λ1、R1、T1。
④計算新模型參數下的目標函數值E1(λ1,R1,T1)。
⑤計算目標函數差ΔE,ΔE=E1-E0。
⑥判斷新模型參數是否接受,依Metropolis準則[22]為判斷依據:若ΔE<0則接受;若ΔE>0,則新模型參數以概率P進行接受。
P=exp-ΔE′/t
(12)
式中:t為溫度。
⑦接受新的模型參數時,設置λ0=λ1,R0=R1,T0=T1。
⑧在溫度t下重復一定次數的擾動接受。
⑨降溫t
tG=t0αG1/a
(13)
式中:t0為初始溫度;G為迭代次數;α為給定常數,本文α=1。
⑩重復步驟③至⑨,直到收斂條件滿足。
2.3 改進ICP算法流程
改進配準點云的ICP算法步驟如下:
①讀取需要配準的2個點云:待配準點云M,基準點云N。
②利用RANSAC算法的二次曲面法對其K鄰域進行曲面擬合。
③根據結合式(9)、公式(10)計算該點主曲率k1、k2,并判斷是否為曲率極值點,遍歷所有點云數據,并刪除小于閾值μ的曲率特征點,得到基準點集M’。
④根據②、③計算待配準點云數據的曲率特征點,得到待配準點集N’。
⑤令為M’0、N’0迭代運算初始點集
⑥以距離最近為依據,查詢特征點對(M’0、N’0)。
⑦根據步驟⑥獲得的對應點集使用四元數法計算,獲取縮放參數λ、旋轉參數R、平移參數T。
⑧使用步驟⑥獲得的λ、R、T對點云M利用公式(11)進行變換,得到新的點云。
⑨依模擬退火法判斷是否為全局最優,既公式(1)全局最小,是則保留,否則重復⑤至⑧直到拼接誤差為全局最優,最終完成配準,算法流程圖如圖2所示。

圖2 算法流程圖
3 實驗驗證與結果分析
為了驗證本文算法的正確性、有效性和實用性,進行以下2組實驗。實驗數據采用斯坦福大學的Horse點云模型和Trimble TX8掃描儀采集某教學樓點云數據進行數據配準實驗。所選用的2組數據都有十多種點云視角數據,在每組數據中隨機選取2種視角進行配準,并與經典ICP算法進行比較。本文算法是在經典ICP算法基礎上進行的改進,算法中加入了噪聲點的剔除和避免出現局部最優,使其相對于經典ICP算法針對部分重疊點云的配準問題得到較好的結果。實驗在Matlab 2010b軟件環境下編程實現。
3.1 實驗一
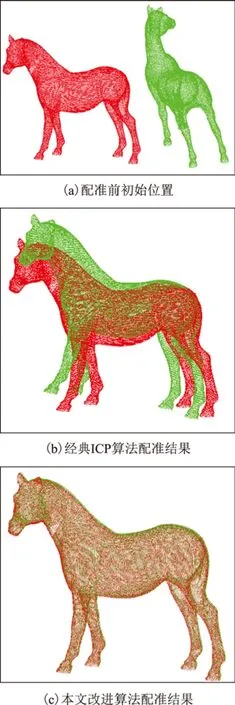
圖3 Horse點云配準結果
為驗證本文方法的正確性,本文對所選用斯坦福大學的Horse點云數據進行配準,并將本文方法與經典ICP算法配準結果進行比較。圖3為Horse點云配準結果圖,紅色點云為基準數據,綠色點云為待配準數據,其中圖3(b)為經典ICP算法配準結果,圖3(c)為本文所提改進算法配準結果。
從圖3可以直觀地看出采用經典ICP算法配準結果較差,兩站點云不能很好地貼合在一起,雖然兩站點云有一部分可以配準在一起,但是仍有大量點云數據配準失敗;而本文所提算法配準結果較好,經計算對應特征點對距離中誤差為2.7×10-3mm。雖然本文所提算法會增加配準時間,但配準結果可以體現出本文所改進的算法可以很好地克服經典ICP算法容易陷入局部最優解的情況。
3.2 實驗二
為驗證本文算法的通用性和實用性,選取Trimble TX8掃描儀采集某教學樓的點云數據為實例進行驗證。所選用的某教學樓點云數據有十多站點云視角,在實驗數據中隨機選取兩站數據進行配準,并與經典ICP算法進行比較。圖4為兩站點云配準前后對比圖,紅色點云為待配準點云M,綠色點云為基準點云N。未配準的兩站數據如圖4(a)所示,用本文算法配準后點云數據如圖4(b)所示。
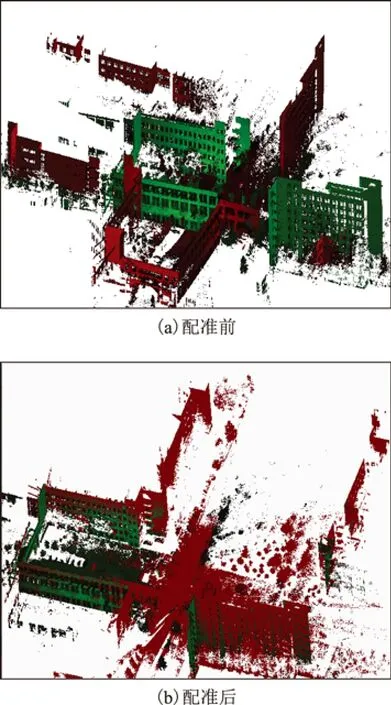
圖4 整體點云配準前后對比圖
本文為驗證該方法的穩定性和避免局部最優,采用2種算法對某教學樓的2個不同視角的點云進行配準。圖5為2種算法局部配準結果圖,其中圖5(a)為ICP經典算法的精確配準圖,圖5(b)為為本文算法的精確配準圖。
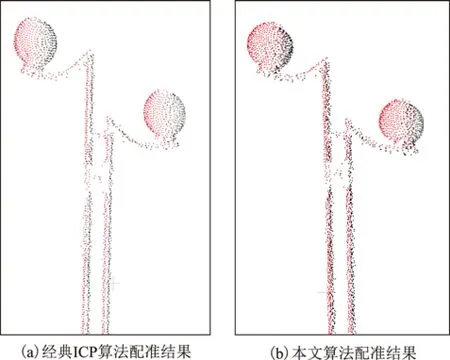
圖5 2種方法局部配準結果
從圖5可以直觀地看出利用經典ICP算法配準后,待配準數據和基準點云數據之間有傾斜、錯層現象。本文所提算法使兩站點云數據相互重合優于經典ICP算法。因此,利用本文算法可以更為精準地進行配準,同時穩健性更強。
為定量描述本文方法的配準效果,在配準后的點云數據中選取房屋角點作為特征點,計算配準后對應角點的距離,繪制距離誤差圖,如圖6所示。在獲取到的點云數據中,很難找到2個對應的點數據表示真實物體的角點,本文利用平面擬合獲取待評價角點周圍的3個平面信息,進而通過3個面相交得到角點坐標。
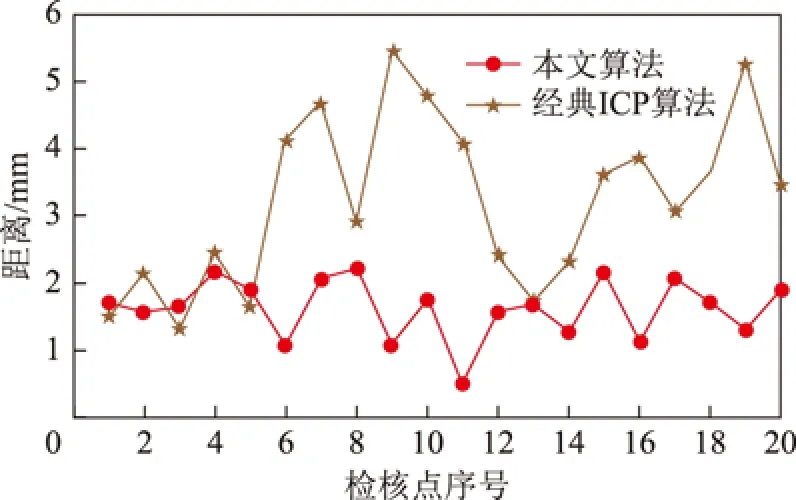
圖6 配準后對應角點距離殘差
從圖6可以清晰看出利用經典ICP算法配準后,大部分檢核點的配準誤差在2 mm左右,但有部分檢核點配準誤差大于5 mm,這是由于通過經典ICP算法進行配準,出現局部最優情況而產生影響。本文算法在提取的特征點時加入結合RANSAC算法,從而去除噪聲的影響提取特征點,同時利用模擬退火算法得到最優的轉換參數,使配準誤差優于2.5 mm,且誤差分布較均勻。實驗配準圖和實驗獲得的對比數據,充分表明本文所提配準方法比經典ICP算法更穩定、精度更高。
4 結束語
在多視角測得散亂點云數據的情況下,利用經典的ICP算法得到的配準結果穩定性不高,容易陷入局部最優。針對這一問題,本文在經典ICP算法的基礎上,引入了一種模擬退火算法尋找全局最優的配準方法。該方法的核心思想是結合RANSAC算法剔除粗差點從而達到穩健的效果,采用模擬退火算法避免點云配準陷入局部最優使得拼接誤差最小,得到全局最優完成數據精確的配準。實驗結果表明,本文數據配準算法提高了配準的穩定性和配準精度,能夠滿足多視角點云數據的配準要求,驗證了本文提出算法的可行性。
猜你喜歡
數學小靈通·3-4年級(2024年2期)2024-05-15 02:02:28
中學生數理化(高中版.高考數學)(2022年3期)2022-04-26 14:04:16
數學年刊A輯(中文版)(2020年1期)2020-05-19 00:30:36
空間科學學報(2020年2期)2020-04-01 03:50:40
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
中等數學(2019年8期)2019-11-25 01:38:14
當代陜西(2019年10期)2019-06-03 10:12:04
新聞傳播(2018年11期)2018-08-29 08:15:24
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
廣西科技大學學報(2016年1期)2016-06-22 13:10:38