搭載POS數(shù)據(jù)的無(wú)人機(jī)影像提高定位精度的方法
2019-09-09 08:37:58賈鑫楊樹文張志華閆如柳
遙感信息 2019年4期
賈鑫,楊樹文,張志華,閆如柳
(1.蘭州交通大學(xué) 測(cè)繪與地理信息學(xué)院,蘭州 730070;2.地理國(guó)情監(jiān)測(cè)技術(shù)應(yīng)用國(guó)家地方聯(lián)合工程研究中心,蘭州 730070;3.甘肅省地理國(guó)情監(jiān)測(cè)工程實(shí)驗(yàn)室,蘭州 730070)
0 引言
無(wú)人機(jī)低空遙感系統(tǒng)是高分辨率影像獲取和處理的新興技術(shù),具有機(jī)動(dòng)靈活、應(yīng)急響應(yīng)迅速、成本經(jīng)濟(jì)低等優(yōu)點(diǎn),在中小區(qū)域的土地規(guī)劃、工程勘察、災(zāi)害預(yù)警等方面發(fā)揮著重要作用[1-3]。無(wú)人機(jī)搭載位置和姿態(tài)系統(tǒng)(position and orientation system,POS)主要是由全球定位系統(tǒng)(global position system,GPS)和慣性導(dǎo)航系統(tǒng)(inertial navigation system,INS)組合而成,二者相輔相成,能夠提高導(dǎo)航系統(tǒng)的穩(wěn)定性和可靠性,極大地加快影像POS數(shù)據(jù)的獲取速度,提升影像的處理效率[4-5]。
但是受到飛行平臺(tái)、載荷的限制,機(jī)載POS數(shù)據(jù)無(wú)相應(yīng)地面基站數(shù)據(jù)可以用于差分處理,無(wú)法搭載高精度的定位定姿數(shù)據(jù)。若要用大量地面控制點(diǎn)精確解算出影像的外方位元素,增加外業(yè)工作量,這與快速有效的成圖理念相悖,且目前流通于市場(chǎng)的無(wú)人機(jī)獲取的POS數(shù)據(jù)本身并不是攝影中心的外方位元素,因此機(jī)載原始POS數(shù)據(jù)含有一定的系統(tǒng)誤差,不能直接將其視為正確的外方位元素而用于影像地理空間定位。魯恒、李永樹等[6]提出一種改進(jìn)POS數(shù)據(jù)方法用于影像定位;張坤鵬、于廣瑞[7]等自主設(shè)計(jì)飛行方案,利用差分全球?qū)Ш叫l(wèi)星系統(tǒng)(global navigation satellite system,GNSS)技術(shù)獲取高精度無(wú)人機(jī)影像外方位元素;馬懷武、王俊強(qiáng)[8]提出利用實(shí)時(shí)動(dòng)態(tài)(real-time kinematic,RTK)載波相位差分技術(shù)結(jié)合無(wú)人機(jī)影像POS數(shù)據(jù)進(jìn)行影像坐標(biāo)定位。以上方法均有效提高了影像定位精度,但是在進(jìn)行POS數(shù)據(jù)糾正時(shí)未考慮到奇、偶行帶間的影像外方位線元素誤差具有相反性,且布設(shè)控制點(diǎn)較多,工作量較大。本文通過(guò)分析外方位元素系統(tǒng)誤差來(lái)源,并在實(shí)驗(yàn)區(qū)內(nèi)僅布設(shè)少量控制點(diǎn),利用空間后方交會(huì)解算影像外方位元素,針對(duì)奇、偶行帶間影像外方位線元素誤差具有相反性,建立POS數(shù)據(jù)改正模型,糾正其原始數(shù)據(jù),得到精度較高的影像外方位元素,為后續(xù)的影像處理提供了先前條件,提高了影像定位精度,加快了中小區(qū)域大比例尺成圖效率。
1 坐標(biāo)測(cè)量與轉(zhuǎn)換
在攝影測(cè)量中,建立像方到物方的轉(zhuǎn)換模型,根據(jù)像點(diǎn)與相應(yīng)地面點(diǎn)求解其中的模型參數(shù),利用RTK技術(shù)獲得地面控制點(diǎn)坐標(biāo);在像平面坐標(biāo)中,坐標(biāo)原點(diǎn)通常是鏡頭主光軸與像平面相交的點(diǎn),但是該點(diǎn)一般和影像幾何中心不重合,因此對(duì)于像點(diǎn)的量測(cè)得首先獲得獲取影像的內(nèi)方位元素x0,y0,f。
像素坐標(biāo)用行列號(hào)表示,定義為(c,r);假設(shè)影像的寬為width、高為height,單位為像素。單個(gè)像素對(duì)應(yīng)的尺寸為d,即像元大小。根據(jù)像素坐標(biāo)轉(zhuǎn)換像平面坐標(biāo)公式(1)得到像點(diǎn)的像平面坐標(biāo)。
(1)
地面點(diǎn)坐標(biāo)以及POS 數(shù)據(jù)里的線元素?cái)?shù)據(jù)都是地面測(cè)量坐標(biāo)系下的坐標(biāo)數(shù)據(jù),即經(jīng)緯度與高程(B、L、H)。建立空間后方交會(huì)模型時(shí),必須統(tǒng)一坐標(biāo)才能求解外方位元素,因此需要坐標(biāo)轉(zhuǎn)換,將已知點(diǎn)坐標(biāo)數(shù)據(jù)及POS數(shù)據(jù)(B、L、H)轉(zhuǎn)化為地面攝影測(cè)量坐標(biāo)系(投影坐標(biāo)系)下的空間坐標(biāo)(X、Y、Z)。
2 單像空間后方交會(huì)
空間后方交會(huì)是攝影測(cè)量中一個(gè)基本問(wèn)題,主要思想是:在已知若干地面控制點(diǎn)坐標(biāo)和相應(yīng)的像點(diǎn)坐標(biāo)量測(cè)值,建立共線條件方程[9-10],反求影像在無(wú)人機(jī)飛行攝影時(shí)刻的外方位元素,即Xs、Ys、Zs、φ、ω、κ。其中核心思想就是共線條件方程的建立:
(2)
式中:x,y為以像主點(diǎn)為原點(diǎn)的像平面坐標(biāo);x0,y0為像主點(diǎn);f為像片主距;X,Y,Z為物點(diǎn)的地面坐標(biāo);Xs,Ys,Zs為外方位線元素;a1,a2,a3,b1,b2,b3,c1,c2,c3為外方位角元素表示的方向余弦。
由于共線方程是非線性函數(shù),不利于迭代計(jì)算,因此需要將其線性化,按照泰勒級(jí)數(shù)一次項(xiàng)進(jìn)行展開(kāi),并根據(jù)最小二乘平差原理,建立法方程[9-11],求解6個(gè)外方位元素的改正數(shù)dX,dY,dZ,dφ,dω,dκ。將原始機(jī)載POS數(shù)據(jù)作為函數(shù)運(yùn)算的初值,計(jì)算仍采用逐步趨近的方法,最后得出6個(gè)外方位元素的解,如公式(3):
(3)
3 外方位元素系統(tǒng)誤差分析
3.1 外方位線元素的系統(tǒng)誤差
由于無(wú)人機(jī)上相機(jī)曝光位置(攝影中心)S與POS記錄位置并非完全重合,存在一定的位移偏量,致使POS數(shù)據(jù)并非嚴(yán)格是影像的外方位元素,如圖1所示。

圖1 攝影中心S與POS位置關(guān)系
因此外方位元素存在系統(tǒng)誤差,而系統(tǒng)誤差主要來(lái)自于外方位的3個(gè)線元素(X,Y,Z)的偏移量[12]。一般而言,無(wú)人機(jī)飛行時(shí)近似與地面平行,然而實(shí)際過(guò)程中由于飛機(jī)不平穩(wěn)性以及空氣風(fēng)力的影響,使得在高度(Z方向上)也會(huì)發(fā)生變化,存在不可忽略的偏移量ΔZ,因此由式(4)得POS數(shù)據(jù)與攝影中心的偏移量:
(4)
當(dāng)無(wú)人機(jī)在設(shè)定好的區(qū)域進(jìn)行拍攝照片時(shí),飛行航線呈“S”狀掃描整個(gè)區(qū)域,因此奇數(shù)行帶和偶數(shù)行帶的飛行方向正好相反,如圖2所示。根據(jù)無(wú)人機(jī)飛行軌跡及奇、偶行帶間無(wú)人機(jī)攝影中心外方位元素誤差具有相反性,利用誤差改正數(shù)分別對(duì)不同行帶影像的外方位線元素進(jìn)行改正。

圖2 無(wú)人機(jī)相反航線誤差偏移方向
3.2 外方位角元素的系統(tǒng)誤差分析
在無(wú)人機(jī)攝影測(cè)量中,通過(guò)GPS/INS組合系統(tǒng)獲取到無(wú)人機(jī)的定姿定態(tài)POS數(shù)據(jù),但是POS數(shù)據(jù)中3個(gè)姿態(tài)角(俯仰角,橫滾角,旋偏角)并不完全等于正射影像外方位角元素(φ,ω,κ),因此要進(jìn)行坐標(biāo)轉(zhuǎn)換和系統(tǒng)誤差改正[13]。
第一、由于POS數(shù)據(jù)中3個(gè)姿態(tài)角參數(shù)是慣導(dǎo)系統(tǒng)坐標(biāo)系與導(dǎo)航坐標(biāo)系(移動(dòng))間相應(yīng)坐標(biāo)軸的夾角,影像外方位角元素是像平面坐標(biāo)系與地面攝影測(cè)量坐標(biāo)系相應(yīng)坐標(biāo)軸的夾角,基于坐標(biāo)系的不一致,所以要進(jìn)行坐標(biāo)轉(zhuǎn)換,求解轉(zhuǎn)換角。
第二、由于相機(jī)儀器安裝工藝的原因,導(dǎo)致INS與相機(jī)的主軸并非完全平行,因此2個(gè)坐標(biāo)系之間存在一定的夾角差,稱為視準(zhǔn)軸誤差,一般小于3°。無(wú)人機(jī)在作業(yè)時(shí),俯仰角與橫滾角對(duì)φ角和ω角影響較小,其中視準(zhǔn)軸誤差主要表現(xiàn)在航偏角與κ角的偏差[14]。如圖3所示,INS坐標(biāo)系的3個(gè)坐標(biāo)軸(xins,yins,zins)分別代表了本體坐標(biāo)系的三坐標(biāo)軸,相機(jī)坐標(biāo)系相對(duì)于INS坐標(biāo)系分別繞x軸、y軸、z軸旋轉(zhuǎn)了α,β,θ。
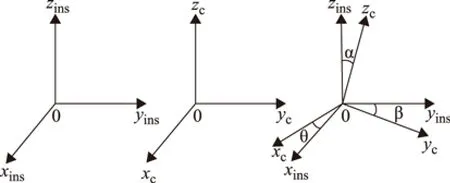
圖3 INS坐標(biāo)系與相機(jī)坐標(biāo)系相應(yīng)軸系間的旋轉(zhuǎn)
4 誤差改正模型
通過(guò)上節(jié)對(duì)系統(tǒng)誤差的分析,掌握了系統(tǒng)誤差來(lái)源,在此基礎(chǔ)上,設(shè)計(jì)誤差糾正模型,用以改正原始POS數(shù)據(jù)。主要內(nèi)容:通過(guò)對(duì)無(wú)人機(jī)飛行拍攝獲取的影像進(jìn)行初始校正與挑選,選取區(qū)域內(nèi)部且畸變程度小的影像,根據(jù)篩選影像在實(shí)驗(yàn)區(qū)域內(nèi)布設(shè)少量控制點(diǎn),然后利用RTK技術(shù)獲取地面點(diǎn)坐標(biāo)值求解相對(duì)應(yīng)的影像外方位元素,并對(duì)POS中線元素和地面控制點(diǎn)進(jìn)行坐標(biāo)轉(zhuǎn)換,將二者坐標(biāo)統(tǒng)一到地面攝影測(cè)量坐標(biāo)系下,建立改正模型。假設(shè)通過(guò)地面點(diǎn)解算獲取到n張影像的外方位元素,并且每張影像對(duì)應(yīng)有原始機(jī)載POS數(shù)據(jù),計(jì)算每張影像經(jīng)過(guò)地面控制點(diǎn)解算的外方位元素與POS數(shù)據(jù)的誤差值,如式(5):
(5)
式中:i=1,2…,n,表示計(jì)算的影像張數(shù);ΔXi,ΔYi,ΔZi,Δφi,Δωi,Δκi表示第i張影像外方位元素的改正值。若要選取全部影像的進(jìn)行外方位元素的結(jié)算,反而復(fù)雜耗時(shí)且計(jì)算量大,因此用部分影像的POS數(shù)據(jù)誤差值取均值進(jìn)行整體誤差改正,如式(6):
(6)


表1 不同飛行軌跡的奇、偶行帶影像的X,Y元素誤差改正值
5 實(shí)驗(yàn)內(nèi)容
本文實(shí)驗(yàn)數(shù)據(jù)采用南方測(cè)繪天行H01300無(wú)人機(jī)進(jìn)行拍攝影像,無(wú)人機(jī)采用5組鏡頭對(duì)實(shí)驗(yàn)區(qū)拍攝,通過(guò)2個(gè)架次的飛行,共獲得影像250余張,本次實(shí)驗(yàn)不做傾斜攝影測(cè)量及三維激光掃描方面的研究,因此只選用下視鏡頭所拍攝的影像進(jìn)行處理研究。研究區(qū)為蘭州交通大學(xué)八教廣場(chǎng),實(shí)驗(yàn)區(qū)地形平緩,無(wú)較大高程差。本實(shí)驗(yàn)利用MATLAB設(shè)計(jì)影像后方交會(huì)及誤差改正模型處理流程,糾正外方位元素。
由表2即可得部分原始機(jī)載POS數(shù)據(jù)與經(jīng)過(guò)空間后方交會(huì)解算出的影像外方位元素相應(yīng)的誤差值,根據(jù)誤差改正模型,針對(duì)不同航帶間誤差相反性,對(duì)影像原始機(jī)載POS數(shù)據(jù)進(jìn)行改正,獲得改正后的影像外方位元素。分別進(jìn)行2次實(shí)驗(yàn):①僅用原始POS數(shù)據(jù)且不添加地面控制點(diǎn)數(shù)據(jù)進(jìn)行影像拼接及生成正射影像;同時(shí)也是檢驗(yàn)原始的POS數(shù)據(jù)精度。②利用改正后的POS數(shù)據(jù)且添加地面控制點(diǎn)數(shù)據(jù)進(jìn)行影像拼接及生成正射影像,將以上2次經(jīng)過(guò)實(shí)驗(yàn)處理后的正射影像與地面控制點(diǎn)坐標(biāo)進(jìn)行對(duì)比檢驗(yàn)實(shí)驗(yàn)結(jié)果精度。如圖4所示,在相應(yīng)實(shí)驗(yàn)所得影像中標(biāo)記控制點(diǎn)位置。
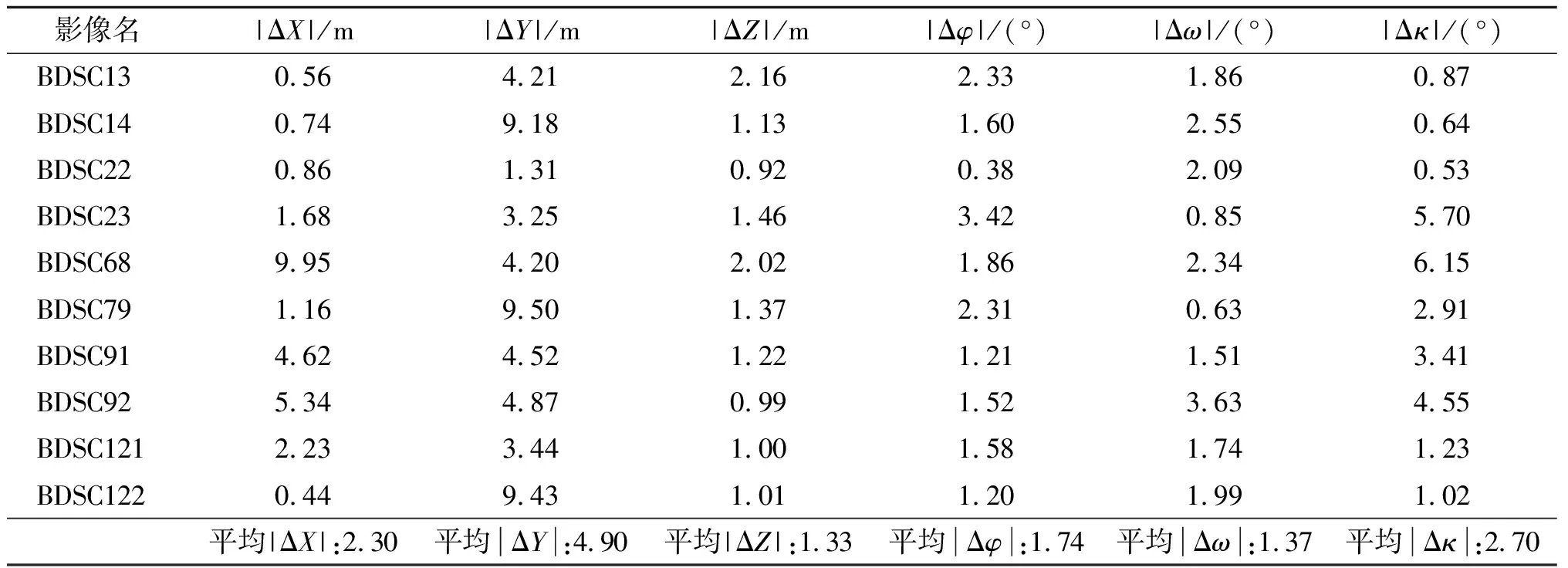
表2 原始POS數(shù)據(jù)與解算出外方位元素誤差值

圖4 2種POS數(shù)據(jù)生成的正射影像
經(jīng)過(guò)RTK獲取地面點(diǎn)坐標(biāo)并在2張影像上對(duì)相應(yīng)點(diǎn)坐標(biāo)進(jìn)行量測(cè),得到表3。進(jìn)而分別計(jì)算2張影像中地面點(diǎn)坐標(biāo)與控制點(diǎn)坐標(biāo)的誤差值,設(shè)影像1和控制點(diǎn)坐標(biāo)誤差為ΔX1,ΔY1,影像2和控制點(diǎn)坐標(biāo)誤差為ΔX2,ΔY2。并求誤差均值,如表4所示。僅用原始POS數(shù)據(jù)且不添加地面控制點(diǎn)數(shù)據(jù)生成正射影像的點(diǎn)誤差較大,水平誤差一般3 m左右,垂直誤差在6 m左右,若要用該方法生成的影像直接用于目標(biāo)定位,其定位精度較低。說(shuō)明目前的無(wú)人機(jī)若沒(méi)有搭載后差分POS數(shù)據(jù)處理系統(tǒng),直接利用POS數(shù)據(jù)進(jìn)行影像定位,其定位精度必受到很大影響,因此若要快速出圖且對(duì)定位精度沒(méi)有嚴(yán)格要求,這種方法比較適合。而根據(jù)原始POS數(shù)據(jù),進(jìn)行誤差糾正后,影像的定位精度具有明顯提高,水平誤差為2.5 m,垂直誤差為1 m,相比較第一種實(shí)驗(yàn)結(jié)果,第二種實(shí)驗(yàn)結(jié)果定位精度高,具有一定的可靠性。

表3 RTK與2幅影像點(diǎn)坐標(biāo)對(duì)比
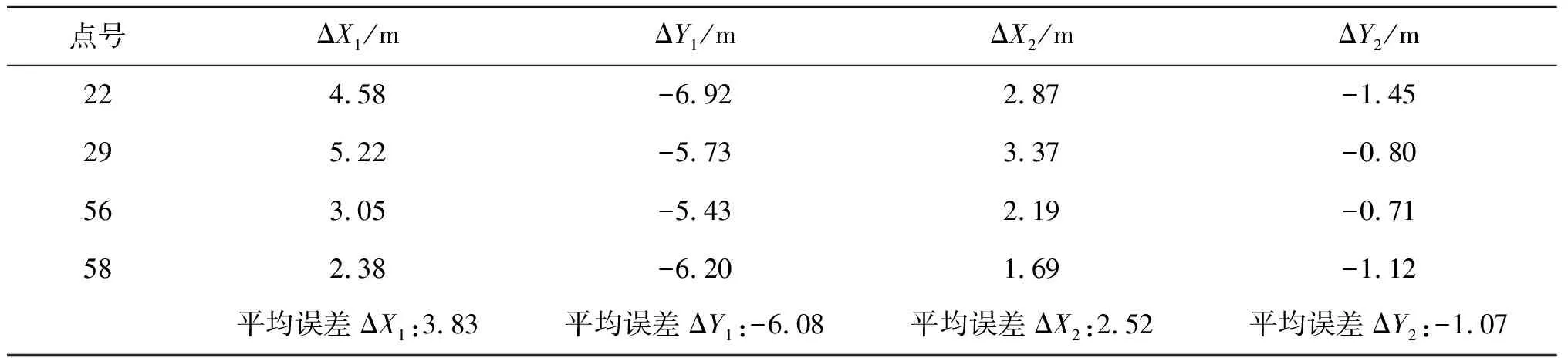
表4 糾正前與糾正后的誤差對(duì)比
6 結(jié)束語(yǔ)
本文根據(jù)原始機(jī)載POS數(shù)據(jù)具有系統(tǒng)誤差,無(wú)法直接用于影像地理定位的缺點(diǎn),通過(guò)獲取地面已知控制點(diǎn)坐標(biāo),建立POS 數(shù)據(jù)糾正模型,提高定位精度。通過(guò)原始POS數(shù)據(jù)與糾正后POS數(shù)據(jù)分別生成的影像間地物點(diǎn)坐標(biāo)的對(duì)比,定位精度有了明顯提高,且該方法符合于無(wú)人機(jī)影像快速成圖的理念,具有更進(jìn)一步的研究潛力。本次實(shí)驗(yàn)同時(shí)也存在不足:①?zèng)]有對(duì)相機(jī)進(jìn)行嚴(yán)格的相機(jī)標(biāo)定,相機(jī)的內(nèi)方位元素和畸變參數(shù)存在誤差;②各個(gè)坐標(biāo)系間的統(tǒng)一和轉(zhuǎn)換問(wèn)題,地理坐標(biāo)系及投影坐標(biāo)系間轉(zhuǎn)換參數(shù)的不同會(huì)導(dǎo)致轉(zhuǎn)換后坐標(biāo)存在誤差;③由于實(shí)驗(yàn)區(qū)覆蓋影像數(shù)量龐大,誤差糾正模型是針對(duì)實(shí)驗(yàn)區(qū)全部影像統(tǒng)一進(jìn)行糾正,沒(méi)有細(xì)化到針對(duì)每一張影像的POS數(shù)據(jù)誤差進(jìn)行糾正,所以模型本身也存在著誤差。以后的工作重點(diǎn)根據(jù)以上問(wèn)題進(jìn)行研究探討,進(jìn)一步提高影像定位精度,探究在無(wú)控制點(diǎn)數(shù)據(jù)的情況下,該如何提高定位精度。