
重疊蘋果果實的分離識別方法
2019-09-10 01:52:06車金慶王帆呂繼東馬正華
江蘇農業學報 2019年2期
車金慶 王帆 呂繼東 馬正華


摘要:針對蘋果采摘機器人重疊果實識別誤差較大的問題,設計了一種分離識別方法。首先在蘋果圖像分割獲取其二值果實區域的基礎上,基于橫、縱投影圖實現重疊形態果實的判別,而后基于邊緣曲線通過SUSAN算法檢測果實輪廓_上的角點,再通過迭代腐蝕和瓶頸準則挑選重疊果實的分離點,并采用Bresenham算法連接分離點實現重疊果實的分離。提取分離果實邊緣曲線的有效輪廓后,通過改進的隨機Hough算法擬合果實圓心及半徑。最后選擇15幅重疊果實區域二值圖像,通過不同角點檢測計算結果的比較,驗證了SUSAN算法相比于其他角點檢測方法更為有效;通過改進的隨機Hough算法識別11幅圖像中的21個果實,其圓心相對誤差平均值、半徑相對誤差平均值和相對偏差平均值分別為6.90%、4.12%和6.07%,比傳統Hough算法分別低4.03、2.75、1.14個百分點,說明改進的隨機Hough算法得到的擬合圓更接近實際蘋果果實區域。
關鍵詞:蘋果;重疊果實;目標識別;圖像處理
中圖分類號:TP391.4
文獻標識碼:A
文章編號:1000-4440(2019)02-0469-07
自然生長條件下果實通常會存在重疊遮擋現象,此類果實的識別是采摘機器人實用化的關鍵問題[1]。重疊遮擋生長形態的果實識別方法不同于無遮擋形態果實以及其他生長形態的果實,在識別之前應對其形態進行判別確認,而后進行識別。尹建軍等[2]提出了基于形態重建的受控標記分水嶺算法搜索靠攏或重疊生長狀態的番茄分界線的方法,實現了不同生長狀態下多目標番茄圖像的自動分割。但由于環境的非結構性,分水嶺算法會出現標記失效,且沒有相關量化試驗數據驗證其分割效果。謝忠紅等[3]以重疊形態的桃果實為研究對象,提出了一種基于凹點搜索的快速定位和檢測重疊果實目標的方法,在剔除誤識別和識別丟失后其定位誤差低于7%。徐越等[4]、王丹丹等[5]在去除遮擋蘋果果實的非真實輪廓段以及非光滑輪廓段后,利用保留下來的真實果實輪廓進行目標參數的估計及其定位,而后綜合利用K-means算法、數學形態學和Spline樣條插值技術,將重疊蘋果果實區域的凹點檢測轉換為凹區域的凸點檢測問題,簡化了凹點檢測的復雜度,平均定位誤差14.15%;同時他們還通過融合K-means與Ncut算法研究了遮擋雙重疊蘋果目標的分割與重建,提高了分割目標與真實目標的重合度,但計算較為復雜。李立君等[6]則提出了一種基于改進凸殼理論的遮擋油茶果定位檢測算法,對于枝葉遮擋重疊油茶果的分割誤差為8.71%。羅陸鋒等[7]提出了一種雙串疊貼葡萄目標識別方法,識別精準度為87.63%~96.12%。本研究在以往相關研究的基礎上,針對紅、黃、綠3種顏色重疊蘋果果實,首先對其重疊形態進行判定,而后通過角點檢測、分離點匹配連接實現重疊果實的分離,再基于分離后果實的有效輪廓通過改進的隨機Hough變換實現重疊蘋果果實的識別。
1 材料與方法
圖像采集與試驗
試驗圖像從江蘇省徐州市豐縣蘋果種植示范區自然環境下拍攝,數碼相機型號為CanonDIGITALIXUS 200 IS,蘋果品種為紅富士、金元帥、王林。采集的圖像包括不同光線下果實圖像,圖像原分辨率為4000x3000像素。從中抽選15幅圖像進行角點檢測算法性能對比,基于11幅圖像中21個果實的定位誤差指標評判識別效果。圖像試驗在MatlabR2013a軟件平臺上進行。平臺計算機硬件配置為:處理器Intel(R)Core(TM)2 Duo CPU@ 2.40 GHz,內存2G。
1.2 圖像分割
從所采集的圖像中基于分割算法獲取果實區域。由于紅色蘋果果實以及枝葉與其背景之間具有較大的顏色差別,為此選擇基于顏色特征的果實區域獲取方法。通過研究比較發現采用基于R-G色差因子的OTSU動態閾值分割方法[8]可獲得較好的分割效果。而對于黃色、綠色蘋果圖像,采用多區域提取而后合并的圖像分割方法[9]獲取果實區域。
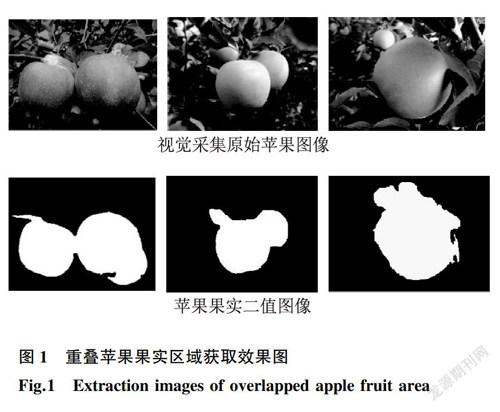
分割后的圖像中常有孤立的小點、毛刺和小孔洞。為了減少這些噪聲對后續工作的影響,以鄰域標記法對圖像中的連通區域進行標記并統計總數,將小于最大連通區域1/12的小區域去除,通過漫水填充算法填補分割區域中的孔洞。最后將圖像劃分為果實和背景2個部分。圖1為經過上述操作獲取的蘋果果實區域二值圖像。
1.3 重疊果實形態判定
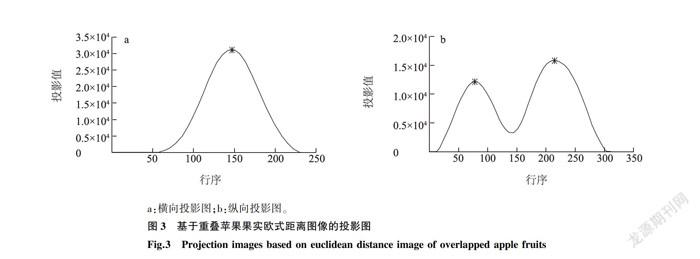
果實形態的判定主要是對重疊形態果實區域的判定,以便后續針對此生長形態的果實進行進一步處理。首先對上述分割獲得的果實區域以水平最小外接矩形框定,然后計算各個框定區域內果實圖像的歐式距離圖(圖2);基于對圖像連通果實區域生成的距離圖進行橫向和縱向投影,獲取橫、縱向投影圖(圖3);最后基于橫、縱向投影圖中的峰點數量判別是否為重疊形態果實。只要任一投影圖中的最大峰點數量多于2,即可認為該區域果實為重疊形態果實。從圖3中可以看出,投影圖最大峰點數為2,由此可以判定圖像中的果實為重疊形態的果實。
1.4 重疊區域角點檢測
由于生長狀態、光照度不同,分割出的果實區域形狀不規則。這時如果直接對邊緣曲線上的點進行兩兩匹配尋找分離點,計算量大且不穩定。為此首先根據重疊果實區域的邊界曲線尋找角點作為后續分離點匹配的預選點組。通過Canny算子獲取邊界曲線。Canny算子相對于其他算子,例如Roberts算子、Sobel算子和Prewitt算子等,檢測出來的邊緣線較細,邊緣連接程度較佳,且目標細節表現明晰、完整,更容易檢測出真正的弱邊緣[10]。
采用SUSAN角點檢測算法在獲得的邊緣輪廓上尋找角點。SUSAN算法根據像素灰度,運用一個圓形模型檢測與像素點相關的局部區域,該局部區域被定義為USAN區域,是指圓形模板中與中心像素亮度相同或相似的像素所組成的區域。SUSAN角點檢測就是根據不同位置時USAN區域面積判斷當前像素點是否為區域角點。具體過程如下:用5x5圓形模板掃描檢測區域。為了避免檢測結果受亮度影響,采用式(1)計算模板內像素點響應的相似度值。
公式
式中,c是相似度函數,(x,y)為模板內任意像素點的坐標f(x,y)為相應的灰度值,(xo,y,)為模板中心像素點的坐標,f(xo,yo)為中心像素點的灰度值。計算相應USAN區域的面積。USAN區域的面積,就是模板內所有像素點對應的相似度值的總和,可以表示為:
公式
設置固定閾值g,采用USAN區域面積與固定閾值比較,根據式(3)獲得初始角點R。式(3)中,g為3/4模板的像元數量。
公式
去除偽角點。計算USAN區域重心與模板中心之間的距離,如果距離較小則該模板中心是偽角點。若模板中心與USAN區域重心之間的連線所經過的像素點全部屬于該USAN區域,則該模板中心即為符合要求的角點(圖4)。
1.5 分離點匹配
分離點匹配即找出能夠作為分離重疊果實的角點,而能夠作為分離點的角點必須在果實區域中軸線兩端,且所在局部曲線的曲率變化較大。通過迭代腐蝕的方法,獲取重疊果實區域里每個果實的中心,連接之后構成中軸線,然后將檢測的角點基于瓶頸準則進行兩兩匹配。迭代腐蝕法是將迭代算法與腐蝕算法結合對圖像進行形態學處理的組合方法。具體是指每次操作都將二值圖像腐蝕1層,每次迭代用1次4鄰域結構元和1次8鄰域結構元腐蝕上一次迭代腐蝕操作后得到的連通區域,直到再經過一次迭代腐蝕操作連通區域個數為0,也就是只保留最中間的區域。在上述過程中考慮到迭代腐蝕算法可能會造成連通區域的減少,需要每次迭代腐蝕結束后恢復消失的連通區域并且重新標記連通區域。
采用SUSAN算法保留了局部曲率變化較大的點作為預選角點,使瓶頸點定位效率提高,準確性更高,減少了計算量。用A和B表示重疊區域邊緣曲線上的角點,瓶頸準則可用式(4)表示:
公式
式(4)中,dist(A,B)表示A、B兩點間歐式距離,length表示邊緣曲線的距離。由于邊緣曲線閉合,根據順、逆時針方向計算,會有2個不同的值,即length(A,B)和length(B,A),瓶頸準則公式中選取較小的曲線距離。選擇E(A,B)值最小時的A°、B*點作為瓶頸點。
圖5a中0,、0203分別表示迭代腐蝕得到的3個白色區域的質心,002、0203即為所作中軸線,A、A、B、B、B、C是SUSAN算法檢測出的角點。基于瓶頸準則選定的分離點見圖5b,去除了一些無效角點。
1.6 分離點連接
分離點匹配后,要將重疊果實分離,還需要作出分離線。采用Bresenham算法[11]連接所匹配的分離點。Bresenham算法是計算機圖形學領域使用最廣泛的直線生成方法,不僅速度快、效果好,而且理論上證明它是目前同類各種算法中最優的。通過該算法作出分離線后,將分離線像素取反,與果實區域的二值圖像進行與運算,即可將重疊果實區域分離(圖6)。
1.7 果實識別
由于果實目標區域的特殊性,分割得到的果實區域不是完整規則的圓形,采用傳統擬合方法則會導致擬合圓的區域相對于實際果實目標區域過大或過小,為果實的識別定位帶來較大的誤差,不利于機器人采摘。為此先提取各個分離果實區域的有效圓弧輪廓,然后基于所提取的有效圓弧輪廓,采用改進的隨機Hough變換方法重建圓形輪廓和圓心。
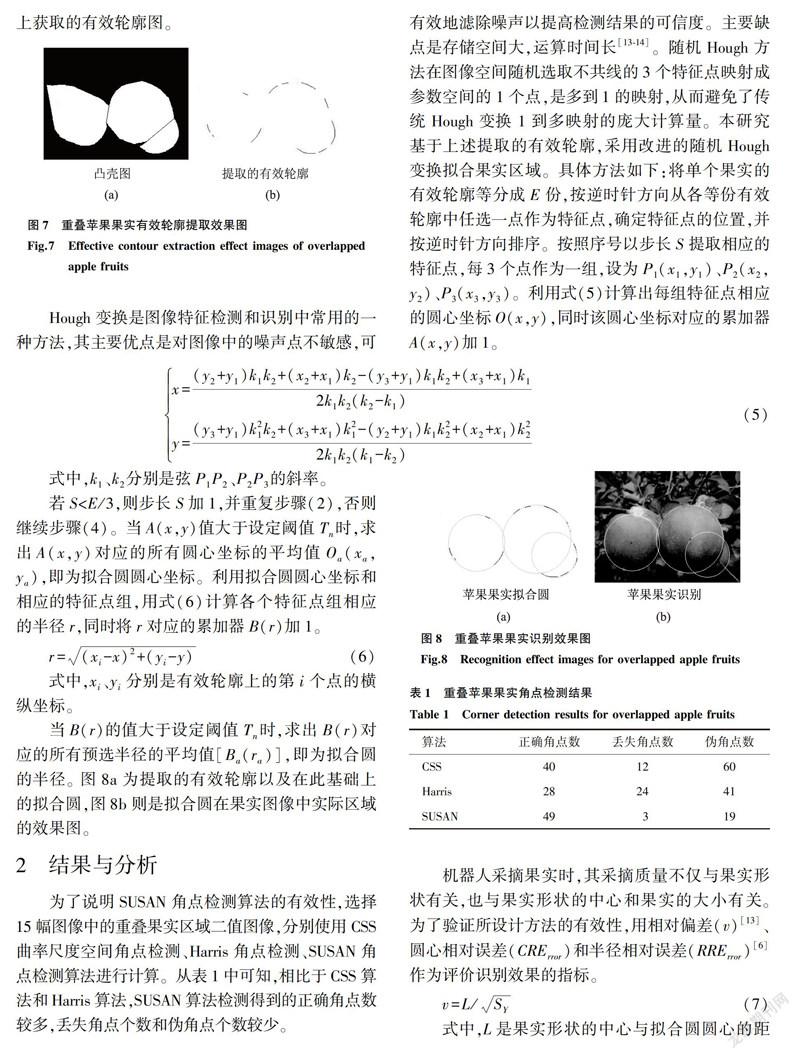
有效輪廓是指果實區域邊緣上曲率相同的圓弧曲線。由于分割的果實區域邊緣曲線較復雜,直接從邊緣曲線上提取有效輪廓的計算量較大。為了減少計算量,通過果實的凸殼圖像來提取有效輪廓。有效圓弧輪廓的相鄰凸殼頂點形成的直線斜率變化較小,接近擬合圓的圓弧;無效輪廓上相鄰凸殼頂點形成的直線斜率存在突變或者有較大間距[12]。提取果實區域有效輪廓的方法如下:(1)以逆時針方向跟蹤凸殼頂點,按照檢測順序排序并確定各個頂點的位置。(2)根據序號大小計算相鄰頂點間距(D)和所有頂點間距的平均值(T)。若T<D,則認為兩頂點間線段為無效輪廓并去除;反之則該線段作為預選有效輪廓。(3)計算預選有效輪廓的線段斜率(h),并計算相鄰預選有效輪廓線段斜率的絕對差值(S)和所有斜率絕對差值的均值(T)。(4)若相鄰預選有效輪廓線段的絕對差值(S)符合0<S<T,則該相鄰的兩段線段為有效輪廓,否則為無效輪廓,并去除。圖7b即為在圖7a凸殼圖基礎Hough變換是圖像特征檢測和識別中常用的一種方法,其主要優點是對圖像中的噪聲點不敏感,可有效地濾除噪聲以提高檢測結果的可信度。主要缺點是存儲空間大,運算時間長[13,14]隨機Hough方法在圖像空間隨機選取不共線的3個特征點映射成參數空間的1個點,是多到1的映射,從而避免了傳統Hough變換1到多映射的龐大計算量。本研究基于上述提取的有效輪廓,采用改進的隨機Hough變換擬合果實區域。具體方法如下:將單個果實的有效輪郭等分成E份,按逆時針方向從各等份有效輪廓中任選一點作為特征點,確定特征點的位置,并按逆時針方向排序。按照序號以步長S提取相應的特征點,每3個點作為一組,設為P(x,y1)、P2(x2,y2)P3(x3,y3)。利用式(5)計算出每組特征點相應的圓心坐標0(x,y),同時該圓心坐標對應的累加器A(x,y)加1。
公式
式中,k、kz分別是弦PP2、P2P3的斜率。
若S<E/3,則步長S加1,并重復步驟(2),否則繼續步驟(4)。當A(x,y)值大于設定閾值T,時,求出A(x,y)對應的所有圓心坐標的平均值0。(xa,y。),即為擬合圓圓心坐標。利用擬合圓圓心坐標和相應的特征點組,用式(6)計算各個特征點組相應的半徑r,同時將r對應的累加器B(r)加1。
公式
式中,x;y;分別是有效輪廓上的第i個點的橫縱坐標。
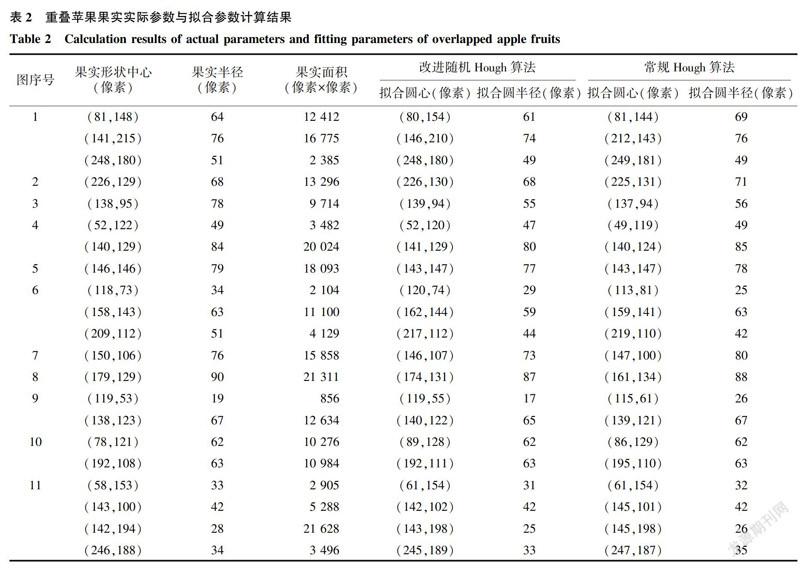
當B(r)的值大于設定閾值T,時,求出B(r)對應的所有預選半徑的平均值[B。(r。)],即為擬合圓的半徑。圖8a為提取的有效輪廓以及在此基礎上的擬合圓,圖8b則是擬合圓在果實圖像中實際區域的效果圖。
2 結果與分析
為了說明SUSAN角點檢測算法的有效性,選擇15幅圖像中的重疊果實區域二值圖像,分別使用CSS曲率尺度空間角點檢測、Harris角點檢測、SUSAN角點檢測算法進行計算。從表1中可知,相比于CSS算法和Harris算法,SUSAN算法檢測得到的正確角點數較多,丟失角點個數和偽角點個數較少。
機器人采摘果實時,其采摘質量不僅與果實形狀有關,也與果實形狀的中心和果實的大小有關。為了驗證所設計方法的有效性,用相對偏差(v)[13]圓心相對誤差(CRE)和半徑相對誤差(RRE)作為評價識別效果的指標。
公式
式中,L是果實形狀的中心與擬合圓圓心的距離,S,是果實實際區域的面積。
公式
式(8)、(9)中,L是果實形狀的中心與擬合圓圓心的距離,RealR是果實圖像的半徑,CalR是擬合圓的半徑。3個誤差值越小,表示擬合圓越接近果實實際區域。
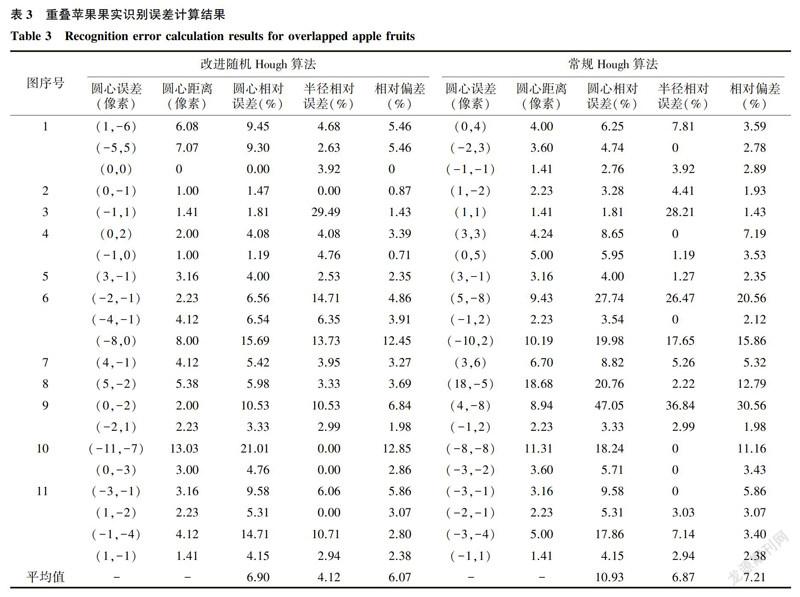
表2中列出了圖像中21個果實的實際面積、形狀的中心坐標及半徑、改進的隨機Hough算法計算的擬合圓心和半徑、常規Hough算法計算的擬合圓心和半徑。表3是采用改進的隨機Hough算法與傳統Hough算法以表2中的數據計算得出的圓心誤差和圓心距離,以及利用式(7)、(8)、(9)計算得出的圓心相對誤差、半徑相對誤差和相對偏差。試驗中圓心距離是指坐標差值對應的直線距離,圓心誤差是指擬合圓圓心與果實形狀的中心的坐標差值。
從表2、表3可以看出,改進的隨機Hough算法得到的圓心與實際圓心的距離較小,因而圓心相對誤差較小;改進的隨機Hough算法得到的擬合圓半徑更接近果實實際半徑,因而半徑相對誤差也較小。改進的隨機Hough算法得到的圓心相對誤差、半徑相對誤差和相對偏差平均值分別為6.90%、4.12%和6.07%,常規Hough算法得到的這3個指標的平均值分別為10.93%、6.87%和7.21%。與改進的隨機Hough算法誤差平均值相比,常規Hough算法的圓心相對誤差平均值高4.03個百分點,半徑相對誤差平均值高2.75個百分點,相對偏差平均值高1.14個百分點,說明改進的隨機Hough算法得到的擬合圓更接近果實區域。
3結論
為了蘋果采摘機器人能夠準確識別重疊狀態下的果實目標,本研究設計了重疊蘋果果實的分離識別方法。首先研究了重疊形態果實的判別方法;而后通過角點檢測、分離點匹配連接,分離重疊形態果實,在提取分離果實的有效圓弧輪廓后,通過改進的隨機Hough變換方法識別分離后的果實。最后通過試驗驗證了本方法的有效性。本方法對于其他重疊果蔬圖像的識別也有一定的借鑒意義。
參考文獻:
[1]宋懷波,張傳棟,潘景朋,等.基于凸殼的重疊蘋果目標分割與重建算法[J].農業工程學報,2013,29(3):163-168.
[2]尹建軍,毛罕平,王新忠,等.不同生長狀態下多目標番茄圖像的自動分割方法[J].農業工程學報,2006,22(10):149-153.
[3]謝忠紅,姬長英,郭小清,等.基于凹點搜索的重疊果實定位檢測算法研究[J].農業機械學報,2011,42(12):191-196.
[4]徐越,李盈慧,宋懷波,等.基于Snake模型與角點檢測的雙果重疊蘋果目標分割方法[J].農業工程學報,2015,31(1):196-203.
[5]王丹丹,徐越,宋懷波,等.融合K-means與Ncut算法的無遮擋雙重疊蘋果目標分割與重建[J].農業工程學報,2015,31(10):227-234.
[6]李立君,陽涵疆.基于改進凸殼理論的遮擋油茶果定位檢測算法[J].農業機械學報,2016,47(12):285-292.
[7]羅陸鋒,鄒湘軍,王成琳,等.基于輪廓分析的雙串疊貼葡萄目標識別方法[J].農業機械學報,2017,48(6):15-22.
[8]馬正華,申根榮,呂繼東.基于極限腐蝕的重疊蘋果果實分割方法[J].江蘇農業學報,2017,33(6):1372-1378.
[9]王帆,呂繼東,申根榮,等.基于CLAHE和開閉運算的綠色蘋果圖像分割[J].計算機測量與控制,2017,25(2):141-145.
[10]田光兆,姬長英,王海青,等.基于MATLAB的若干蘋果邊緣檢測方法及其特性的對比研究[J].科學技術與工程,2010,10(16):3873-3877.
[11]劉坤,呂曉琪,谷宇,等.快速數字影像重建的2維/3維醫學圖像配準[J].中國圖象圖形學報,2016,21(1):69-77.
[12]王鑫,胡洋洋,楊慧中.基于迭代腐蝕的粘連細胞圖像分割研究[J].南京理工大學學報,2016,40(3):286-289.
[13]丁幼春,王書茂.基于RHT的多圓檢測改進算法[J].中國農業大學學報,2008,13(4):121-125.
[14]馮養杰,林小竹.基于改進Hough變換的指針式儀表自動識別方法研究[J].北京印刷學院學報,2015,23(4):62-66.
