
一種智能可控柑橘采摘剪的設計
2019-09-10 07:22:44高宇杭鄔明良李泉良游業豪王利紅
河南科技 2019年10期
高宇杭 鄔明良 李泉良 游業豪 王利紅




摘 要:我國柑橘種植面積和產量均居世界之首,其采摘大多仍依靠人工用剪刀采摘完成。針對人工采摘柑橘過程中存在的采摘時間長、勞動強度大及不能持續采摘致使采摘效率低的問題,本文設計了一種智能的“一橘一動”手持式可控自動剪,減輕人工采摘柑橘時的疲勞。該裝置重量輕、體積小、結構簡單、成本低廉、使用方便。
關鍵詞:柑橘采摘剪;手持式電動剪;觸動開關
中圖分類號:S225.93 文獻標識碼:A 文章編號:1003-5168(2019)10-0027-04
Abstract: Citrus acreage and production in China ranks first in the world, most of the citrus picking process still depends on manual picking with scissors. In order to solve the problems of long picking time, high labor intensity and unsustainable picking in the process of artificial picking of citrus, an intelligent "one-move" hand-held controllable automatic shear was designed to alleviate the fatigue of artificial picking of citrus. The device has the advantages of light weight, small volume, simple structure, low cost and convenient use.
Keywords: citrus picking scissors;hand-held electric scissors;touch switches
1 緒論
1.1 問題的提出
現階段,柑橘的采摘仍依靠人工完成。而長時間勞作容易導致采摘人員身體疲勞,影響采摘效率。此外,部分品種的柑橘主要生長在丘陵和高山地區,地面有斜坡,基礎設施條件差,無法使用大型的交通運輸工具,因此,柑橘采摘后的運輸也成為亟待解決的問題之一。為滿足果農的采摘需求,提高勞動生產率,降低勞動成本,解決采摘裝置缺乏和勞動力短缺等問題,半自動化采摘裝備的研制和技術突破成為當前需要解決的主要問題。
1.2 水果采摘機械國內外研究現狀
現有的采摘高處水果的摘果器多為長桿摘果網兜。而采摘低處柑橘或水果的摘果器主要為:剪粗樹枝的電動切割機,價格昂貴,目前并未用于柑橘采摘;帶視覺識別的機械手臂采摘辣椒的機械裝置;依靠吸力將蘋果吸取收集的機械裝置。
通過調查研究得出國內外水果采摘機械現狀為:采用農業機器人和智能化采摘機械是未來發展的趨勢,目前學者和專家開展了大量試驗研究和技術探索,但實際應用中仍存在技術難題,無法滿足市場需求。主要原因是:①采摘機械的試驗條件單一和理想化,水果實際生長環境復雜多變,而機械采摘受各種因素影響,無法實現精確采摘;②各水果的培育模式、栽植方式及生產環境存在較大差異,機械采摘收獲難度較大;③水果品種多樣,果樹高低繁茂差異顯著,果農過度追求產量和經濟利益,采取密植農藝,沒有預留機械采摘空間。
1.3 本文的主要內容
針對現有采摘方式和采摘機械存在的不足,結合采摘工人的實際需求,本文設計了一種智能可控的柑橘采摘剪及輔助裝置,幫助采摘工人減輕工作強度。設計目標以成本低廉、結實可靠和操作方便靈活。
2 機械結構設計
2.1 設計構想
為了能夠剪斷果柄,該裝置應該有足夠大的剪切力;為了能在樹枝間靈活操作,該裝置應小巧輕便;為了縮短采摘時間,該裝置單次剪切動作耗時要短于人工剪切;為了能長時間作業且采摘人員不易疲勞,該裝置應該電量足、重量輕[1]。
2.2 運動方案設計
2.2.1 剪刀刀頭的設計。為有效將柑橘與樹枝分離,且耗時短,又不損傷果皮,該智能可控柑橘采摘剪采用弧刀咬合切割果柄。此款弧形刀頭,一個刀頭固定,另一個刀頭繞軸旋轉,切割快速有效,且人工采摘多用類似剪刀。這種剪刀刀頭更小更薄,更易剪切果柄,且加工簡單,行業發展成熟,成本較低廉、可替換性強。綜合考慮經濟型性、可替換性和剪切能力等可知,弧刀咬合切割機構更能滿足本文的設計需要[1]。
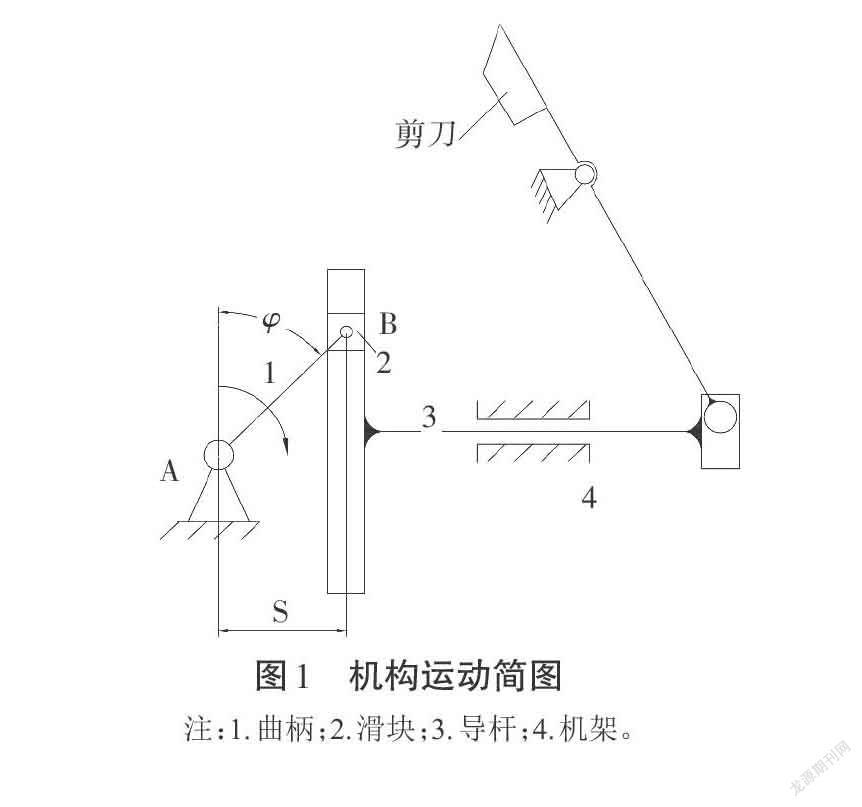
2.2.2 傳動機構的設計。因剪刀末端為繞軸旋轉的間歇式運動,需要將原動件的圓周運動轉變為直線往復運動。該智能可控柑橘輔助采摘剪的工作原理為正弦機構實現循環往復直線運動。該傳動方案易于加工制造,能實現力的高效傳遞,運行平穩。
2.2.3 原動件的設計。該智能可控柑橘采摘剪以伺服電機為原動件,能精確控制旋轉角度,提供大扭矩,且重量輕,成本中等。
智能可控柑橘采摘剪的機構運動簡圖如圖1所示,機構自由度計算公式為:
2.3 受力分析與結構設計
2.3.1 切割柑橘果柄力實驗。本文選取四川德陽地區的紅柑橘樹枝做切割力實驗,進行了20組對照實驗,樹枝直徑范圍為1.5~3.5mm。
陳燕等人[2]的研究得出,切割速度、刀具形式和滑切角均顯著影響柑橘果柄的切割力學參數。本實驗采用的是平刀刀頭,0°滑切角進行實驗。因實驗在4月份,只能做切割柑橘樹枝的實驗,與實際切割柑橘果柄存在一定差異。通過實驗數據得出,切割3.5mm直徑的果柄至少需要40N的力[3]。
2.3.2 正弦機構尺寸確定。通過在SolidWorks中進行運動仿真分析可知,剪刀開合角度20°,導桿3(見圖1)的水平位移量為6mm,初步設置曲柄1(見圖1)長度為6.75mm,滑塊2(見圖1)垂直方向的位移量為1.5mm,設計樣式如圖2所示,詳細尺寸參見工程圖。
3 控制系統設計
3.1 控制系統的總體設計
本裝置為了縮減體積、減輕重量、方便使用,選用Arduino Nano作為控制器;為了減少工人的操作步驟,避免剪刀無效剪切,在刃口處安裝了觸動開關,當觸碰到樹枝時才執行剪切動作,并配合一個舵機和電源構成了整個控制系統[4]。
當觸動開關檢測到果柄接觸后輸出信號,信號進入Arduino Nano芯片,芯片輸出剪切信號給舵機,舵機進行一次旋轉動作,帶動剪切機構運動,使剪切果柄實現摘果的目的。其控制系統原理框圖如圖4所示。
3.2 控制模塊設計
3.3 觸動開關設計
考慮到控制要求、尺寸大小和成本造價,選用ESE22MV21T觸動開關作為觸發器,此觸動開關安裝于下刀片。安裝位置如圖6所示。
3.4 電路設計
本文設計的智能柑橘采摘剪用Arduino Nano作為控制器,ESE22MV21T輕觸觸動開關作為觸發器,LD-2701舵機作為執行部件。其系統電路原理圖如圖7所示。
3.5 外接電源設計
為了保證該摘果器重量輕、能耗低,故采用電源與手持裝置分離的方式設計。電線長1 140mm,重290g,電量為4 000mAh,額定電壓7.4V。配有充電接口、電源開關以及電壓過低報警裝置,可供電動剪至少連續使用4h[7]。
電源續航時間計算:舵機最大功率為10.25W,控制器與開關最大功率和為0.5W,裝置功率10.75W,裝置切割一次時間0.32s,切割桔子的速度[V]=40個/min,電源容量4 000mAh額定電壓7.4V。
4 外觀及輔助裝置設計
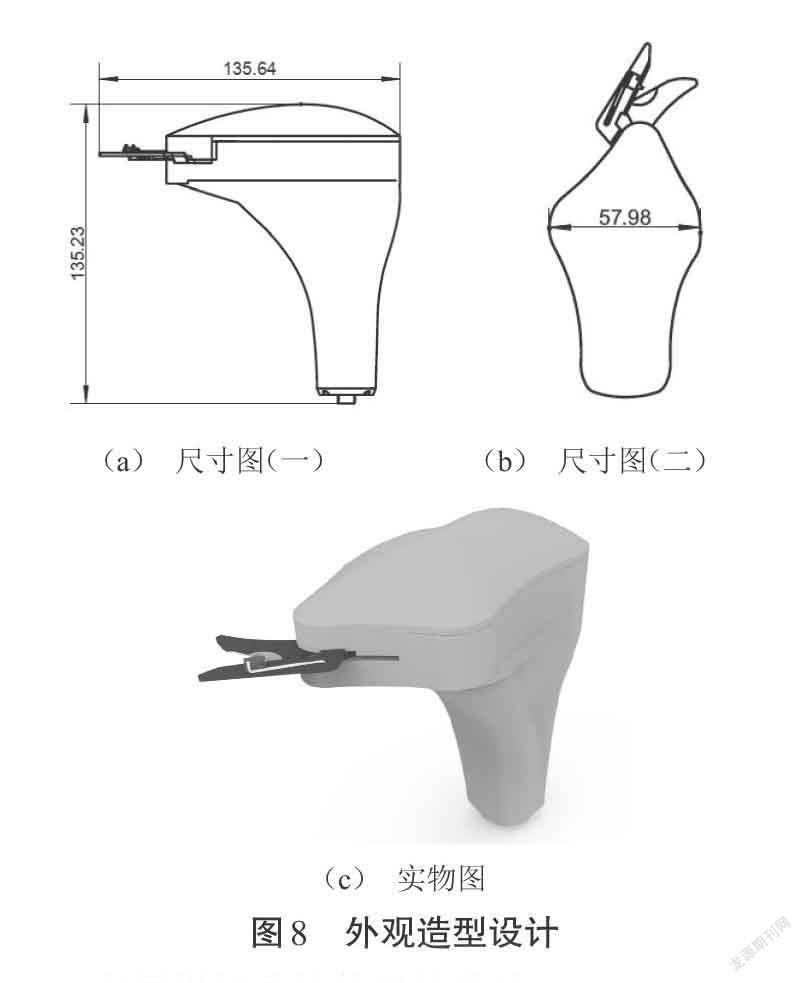
4.1 外觀設計
為了讓使用者擁有良好的握持感,使用舒適,手持電動剪外觀尺寸如圖8所示。
4.2 高層柑橘采摘裝置的設計
因人工獨自采摘高層柑橘時較困難,設計了相應的方便采摘高層柑橘的裝置。該裝置可將高層樹枝拉到方便采摘的位置,伸縮繩能固定當前樹枝的狀態,騰出雙手,進而繼續采摘。使用時,掛鉤1拉住樹枝,掛鉤2勾住收集小車,通過伸縮繩與可伸縮金屬桿調節拉過來的樹枝與人的距離。可伸縮金屬桿最大可伸長350mm,伸縮繩最大可伸長2 000mm,如圖9所示[8]。
5 總結
本套裝置的性能參數如下:可切割的柑橘果柄直徑<3.5mm;剪刀完成一次開合所需時間:0.32s;手持部分重量:180g;電源重量:290g;一次充滿電平均使用時長:4h;充電時間:2h;高層柑橘采摘拉桿最高可到達高度:3m。
本套裝置在機構設計方面,采用正弦機構將電機的轉動變換為往復移動,實現剪刀的擺動。該機構結構緊湊,能實現力的高效傳遞,且占用空間小;在控制方面,利用安裝在刃口處的觸動開關,當觸碰到樹枝才執行剪切動作,避免無效剪切。
本套裝置的應用前景:該電動可控采摘剪裝置通過人工握持機身、自動感應剪切果柄,較好地解決了果農長時間手工采摘導致身體疲勞及效率低下的問題,能滿足普通果農的采摘需求。有較強的適應性,可應用于絕大多數品種的柑橘采摘,也可運用于較細果木的枝葉修剪,配套輔助裝置中的高層柑橘采摘拉桿和收集小車,能很好地輔助人工采摘高層柑橘和運輸柑橘。大批量生產時,成本低廉,且易于市場推廣和銷售。
參考文獻:
[1]余佳佳,饒洪輝,羅時挺,等.南豐蜜桔機械采摘現狀和發展趨勢[J].中國農機化學報,2017(2):135-138.
[2]陳燕,蔣志林,李嘉威,等.基于機器人采摘的柑橘果柄切割力學特性研究[J].河南農業科學,2017(4):147-150.
[3]張水波.柑橘采摘機器人末端執行器研究[D].杭州:浙江工業大學,2011.
[4]孫桓.機械原理[M].6版.北京:高等教育出版社,2001.
[5]鄒慧君,張青.機械原理課程設計手冊[M].北京:高等教育出版社,2010.
[6]濮良貴,陳國定,吳立言.機械設計[M].9版.北京:高等教育出版社,2013.
[7] Sanders K F. Selective picking head for citrus harvester.[J]. Biosystems Engineering,2005(3):279-287.
[8] Harrell R C, Adsit P D, Munilla R D, et al. Robotic picking of citrus[J]. Robotica,1990(4):269.
