基于3S傳感信號分析的小空間搬運車系統及三維模型設計研究
2019-09-10 07:22:44姜淑鳳周子業劉銘劉宏發
智能建筑與工程機械 2019年1期
姜淑鳳 周子業 劉銘 劉宏發



摘??要:為了解決復雜搬運環境下的自動搬運問題,本文設計了一個基于單片機的小空間搬運車智能防盜、防撞、自動巡航系統,通過超聲波及紅外檢測技術,GSM傳輸技術,3S傳感導航技術,三維數字化裝配技術,實時檢測車輛與車體生存空間的關系。該搬運車搬運載體采用輪式二級升降,托運托舉及穩定上扶的機械手結構因此系統自動化程度高,搬運環境適應性好,有較高的應用價值。
關鍵詞:3S傳感;模塊集成;2級搬運;自動避撞巡航系統
中圖分類號:TP391.9 ?文獻標識碼:A ????文章編號:2096-6903(2019)05-0000-00
0?引言
遙感技術、定位技術、地理信息技術這三種技術的集合統稱為3S技術。該技術的應用不僅對地面建設有重要價值,而且還在其他方面有著重要意義。其核心技術是通過各種傳感器采集波信號,根據獲得信號進行空間數據分析,從而掌握被測空間及地表信息然后用于各類控制系統進行環境識別與導航。基于該項技術本文設計了一個基于單片機的小空間搬運車智能防盜、防撞、自動巡航系統的二級升降搬運車。
1 3S空間識別模型的建立
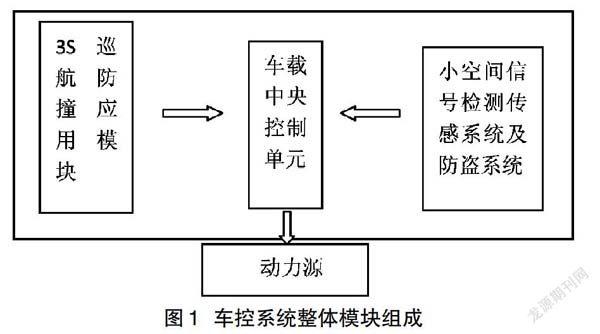
本課題設計是基于超聲波測距技術、紅外線檢測技術及GSM傳輸技術來實現的。超聲波技術主要用于計算發送和接收聲波之間的時間差,用軟硬件結合的方法實時檢測車輛與異物的距離以提醒車主防止碰撞。紅外檢測和震動檢測,是對車輛布防一個可行且可靠的防盜系統。利用GSM模塊的通訊協議,可將小車獲得的空間采樣信息傳輸給主控機,同時主控機(用戶手機)利用3S導航系統指揮車載系統的巡航避撞以此來實現自動控制運動,其設計流程如圖1所示。
本系統具有自動巡航,自動避撞,自動檢測等功能且系統電路設計簡潔、顯示直觀、實用性強、制作成本低、易于安裝,也容易進行外部擴展。
2 控制過程
防撞巡航功能的實現主要是靠超聲波及單片機完成的。其具體表現為利用超聲波測量前車及其余障礙物的距離通過單片機輸出報警信號,或者接入手機導航控制系統,遇到危險時實行安全遠程控制從而實現防撞巡航功能。智能運動及防盜功能是通過紅外傳感器和震動傳感器實現的,當紅外傳感器和震動傳感器感應到不安全信息時會發出聲光及報警信號,然后通過信息模塊發送報警信息到車主,從而實現智能運動及防盜功能。
2.1 軟件控制設計步驟
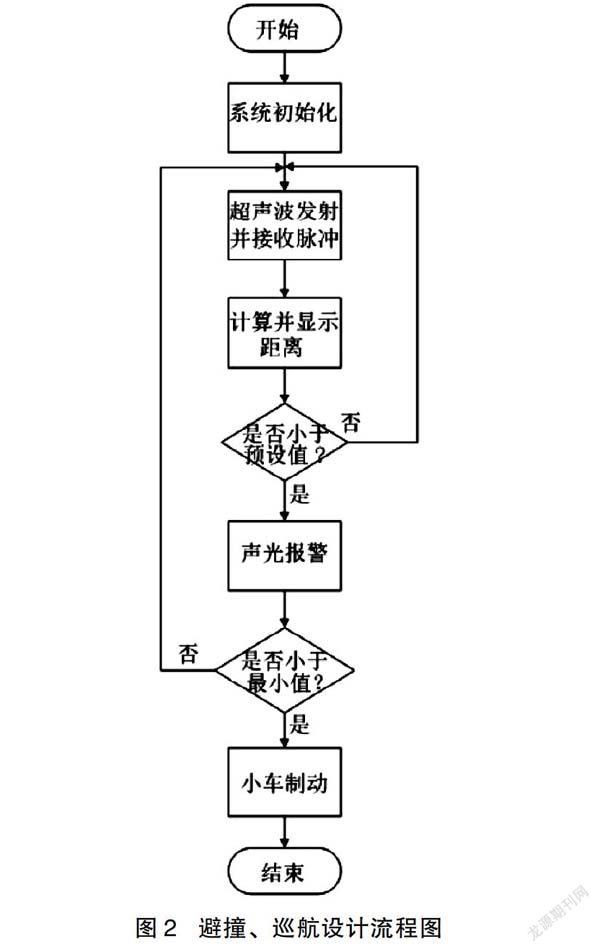
本系統防撞巡航功能設計流程如圖2所示,其具體設計過程為:(1)系統初始化設計、(2)通過超聲波傳感器檢測周圍環境,判斷是否離開“安全工作空間”并將結果以脈沖信號的形式反饋顯示在顯示屏上,如檢測工作空間的可疑相撞物間距小于預設值時進行聲光報警,報警后進行車與被撞物之間的最小距離判斷,如距離小于最小預設值,則制動并進行轉彎過程判斷、(3)如大于最小預設值則返回脈沖發射和檢測反饋信號的判斷流程。在該設計流程中主要用到的元器件有HC-SR501紅外檢測模塊,震動模塊SW-420常閉型,傳輸模塊SIM800A GSM,LED發光二極管等。
2.2 硬件模塊設計
本研究采用理論分析、控制流程設定、硬件選型、三維仿真的技術設計路線。在技術路線的實施過程中,理論分析采用模塊化面向對象的設計方法,在此基礎上結合實驗室控制芯片的編程數據,研究控制流程于參數設定工作。該系統的應用模塊化設計提高了系統的擴展可移植性。
進行對比擴展應用技術的預期分析,通過使用精度更高的傳感器,使測量誤差更低,反應更靈敏,為后續研究提供了廣闊空間。是該設計的信號傳輸預警與環境信號采集反饋系統如圖3所示。
通訊模塊與防撞防盜工作模塊按照控制流程向中央控制單元申請中斷控制。例如:當導航與巡航避撞系統檢測到車輛與前方異物距離為50cm時即觸發預警模塊,綠色和黃色指示燈燈亮,蜂鳴器間斷響起如圖4所示。,此時執行聲光報警動作,同時通過GSM傳輸模塊進行手機接收報警短信并接通導航系統實現自動巡航避撞。
經多次實驗對比后,本設計采用SIM800A控制系統芯片,如圖5所示。
2.3?創新點
本設計是一個基于51單片機的汽車防盜防撞報警系統,其以單片機為控制核心,通過處理超聲波測距傳感器返回的信號,實時顯示車輛與異物的距離以實現汽車的防撞功能。當車輛停止時可打開防盜裝置,檢測到有人接近并觸碰車輛時會進行聲光報警動作并及時發送信號提醒車主。本設計的創新點為:
(1)利用3S應用技術的傳感器與可編程芯片的工作原理、超聲波測距技術原理、紅外檢測原理和超聲波傳感器、電磁波感器工作原理進行系統設計方案,并對測距系統的控制參數進行分析。
(2)完成防撞防盜系統的硬件選型和三維模型設計、完成控制電路設計。
(3)完成防撞防盜系統的工作流程,進行軟件控制流程設計。
(4)通過傳感器和通訊技術實現實物間導航通訊。
3 三維模型設計
考慮到小空間復雜搬運環境的限制,因此對停車和搬運車的運行都有嚴格要求。該設計的機械結構采用插入后舉升托運貨物的搬運架形式,通過設計上扶機械手抓用于固定貨物。車體采用輪式2級行走結構設計,當行走路寬時采用輪胎行走,當空間低于輪胎行走要求時,利用第2級支架舉升車體后采用小輪行走,該結構環境適應性強,設計優勢明顯,其設計如圖6所示。
4 結語
該系統的設計是通過建立人工智能技術及三維仿真技術的實驗模型,利用單片機中央控制和基于3S技術的現代傳感器實現的,該系統可實現車與障礙物之間的距離檢測及防盜報警,其中涉及到mcs-51單片機的系統應用,傳感器檢測模塊,GSM網絡模塊,聲光報警和LED數碼管的距離顯示等功能。本文設計了一個智能小空間搬運機械類的小車防盜防撞車載安全巡航報警系統并進行了三維仿真研究。結果表明:該技術不僅可用于車輛自動控制,還可用于小件物品的復雜空間搬運且該技術具有成本低,應用價值高的特點。
參考文獻
[1] 沈姝君.ARDUINO系統多功能智能物流搬運車的設計[J].設備管理與維修,2019(06):92-94.
[2]?張瑩.3S集成時空信息技術在車輛導航與車輛監控系統中的綜合應用[A].中國智能交通協會.第十二屆中國智能交通年會大會論文集[C].中國智能交通協會:中國智能交通協會,2017:7.
[3]?趙開國.超聲波汽車防撞預警系統的探索研究[J].山東工業技術,2017(10):262.
[4]?鄭大波,2.溫艷.基于超聲波傳感器的汽車防撞系統研究[J/OL].電子世界[2019-07-02].https://doi.org/10.19353/j.cnki.dzsj.20190630.003.
[5]?孫世菊.單片機控制的超聲波測距儀汽車倒車系統研究[J].時代汽車,2016(05):24-25.
[6]?于明玖.搬運車設計[J].設計,2018(19):8.
[7]李奎,陳振漢,王志安,耿傳輝.智能物流搬運車設計探究[J].廣東蠶業,2019,53(01):31-32.
[8]?張強,魏占勝,楊李洋,付越.基于CATIA立體環形汽車停車場三維模型設計[J].河北農機,2019(02):49-50.
[9]?李學忠,劉海岷,趙險峰.基于逆向工程的汽車模型三維造型設計[J].農業裝備與車輛工程,2007(03):38-39.
收稿日期:2019-05-24
基金項目:大學生創新創業項目(201910232047);齊齊哈爾大學研究生教育改革項目(JGXM-QUG-2018013);齊齊哈爾市科技局入庫項目(GYGG-201912);齊齊哈爾大學教學科研項目(YB201825)
作者簡介:姜淑鳳(1979—),女,黑龍江齊齊哈爾人,博士研究生,副教授,碩士生導師,研究方向:機械電子工程技術及逆向工程技術;周子業(1996—),女,黑龍江齊齊哈爾人,在讀碩士研究生,研究方向:工業設計工程、逆向工程應用及木材檢測技術;*通訊作者:劉銘(1998—),男,黑龍江五大連池人,學士學位在讀,研究方向:機械設計及其自動化。
Research on Small Space Pallet System and 3D Model Design Based on 3S?Sensing Signal Analysis
JIANG?Shu-feng?,ZHOU?Zi-ye,LIU?Ming,LIU?Hong-fa
(1.School?of?Mechatronics?Engineering,Qiqihar?University,Qiqihar ?Heilongjiang ?161001;2.School of Mechanical and Electrical Engineering,Northeast Forestry University,Harbin Heilongjiang ?150040)
Abstract: In order to solve the problem of automatic handling in complex handling environment, this paper designs a smart space anti-theft, anti-collision and automatic cruise system based on single-chip microcomputer. It adopts ultrasonic and infrared detection technology, GSM transmission technology and 3S sensing navigation technology. , three-dimensional digital assembly technology, real-time detection of the relationship between the vehicle and the living space of the vehicle body. The handling carrier of the truck adopts the wheeled two-stage lifting, the supporting lifting and the stable manipulator structure, so the system has high degree of automation, the handling environment is adaptable, and has high application value.
Keywords:?3S sensing; module integration; level 2 handling; automatic collision avoidance cruise system
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(2017年9期)2017-09-26 03:41:45