人形機器人正運動學分析
2019-09-10 21:55:46王南張海霞劉月英
大眾科學·上旬 2019年8期
關鍵詞:分析
王南 張海霞 劉月英
摘 要:分析了NAO機器人的結構并對其各個關節做了簡化處理,采用Denavit-Hartenberg法構建了NAO機器人的連桿模型和各個關節自由度的局部坐標系,基于構建的連桿模型推導出了NAO機器人的正運動學和逆運動學模型。
1.前言
機器人運動學是后續機器人一系列相關問題得到深入開發和鉆研的基本保障。機器人運動學主要是分析機器人每個桿件的位姿變化與關節轉角之間的關系,研究的重點在于機器人各個關節在空間中的變化與末端執行器(end effector)之間的位姿,常用的數學模型為基于Denavit-Hartenberg參數的齊次變換法。人形機器人運動學的分析需要面臨的兩種情況分別為:一種情況是已知各個關節轉角求連桿的位姿,這種計算方式稱為正運動學計算方式,本節所要著重研究的是NAO機器人的下肢連桿之間的運動學計算。
2.機器人的描述
NAO機器人是Aldebaran Robotics公司三年的潛心研究而完成的,NAO機器人集多種軟、硬件為一體,兼有討喜的外形設計,高58公分,重約4.5kg,擁有25個自由度。由圖2-2中可以看出,機器人下肢共有11個自由度,分別為跨部共用一個旋轉自由度(LhipYawPitch&RhipYawPitch),兩條腿自由度的分布分別為:髖關節兩個自由度(HipPitch&HipRoll)、膝關節一個前后自由度(KneePitch)、踝關節兩個自由度(AnklePitch&AnkleRoll)。這樣的自由度分配就可以讓NAO機器人完成穩定的步行。
3.人形機器人運動學分析
3.1正運動學模型及方程
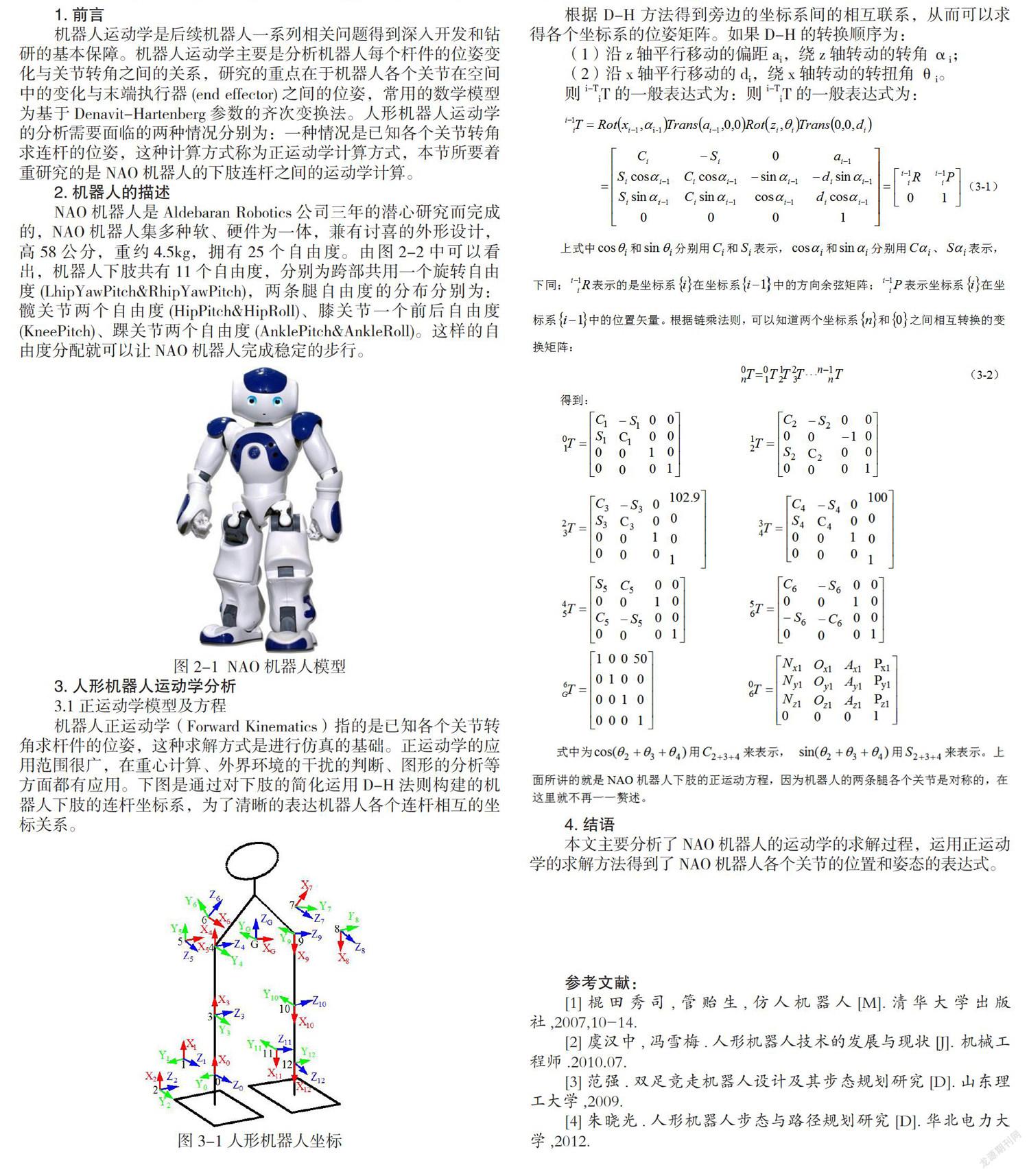
機器人正運動學(Forward Kinematics)指的是已知各個關節轉角求桿件的位姿,這種求解方式是進行仿真的基礎。正運動學的應用范圍很廣,在重心計算、外界環境的干擾的判斷、圖形的分析等方面都有應用。下圖是通過對下肢的簡化運用D-H法則構建的機器人下肢的連桿坐標系,為了清晰的表達機器人各個連桿相互的坐標關系。
根據 D-H 方法得到旁邊的坐標系間的相互聯系,從而可以求得各個坐標系的位姿矩陣。如果D-H 的轉換順序為:
(1)沿 z 軸平行移動的偏距 ai,繞 z 軸轉動的轉角αi;
(2)沿 x 軸平行移動的 di,繞 x 軸轉動的轉扭角θi。
則i-TiT的一般表達式為:則i-TiT的一般表達式為:
4.結語
本文主要分析了NAO機器人的運動學的求解過程,運用正運動學的求解方法得到了NAO機器人各個關節的位置和姿態的表達式。
參考文獻:
[1]棍田秀司,管貽生,仿人機器人[M].清華大學出版社,2007,10-14.
[2]虞漢中,馮雪梅.人形機器人技術的發展與現狀[J]. 機械工程師.2010.07.
[3]范強.雙足競走機器人設計及其步態規劃研究[D].山東理工大學,2009.
[4]朱曉光.人形機器人步態與路徑規劃研究[D].華北電力大學,2012.
作者簡介:王南(1988.05—),女,河北省保定市人,保定市華北電力大學,機械工程專業,研究生
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06