海上多旋翼無人機全自主航拍系統設計
2019-09-10 07:22:44王雷計世勛
無人機 2019年4期
王雷 計世勛



設計了一種適用于海上自主航拍的多旋翼無人機系統。根據無人機系統需求,對多旋翼無人機的起飛與降落、全自主飛行控制、云臺控制、續航能力、機動性與穩定性等技術難點進行了研究與設計,提出了解決方案。
常規影視航拍無人機通常采用多旋翼飛行器作為飛行平臺,由飛行操作手和云臺操作手分別對無人機和云臺進行實時控制,航程和高度一般控制在操作手可視范圍內,對飛行距離有較高需求的航拍任務一般采用FPV(無人機第一視角飛行)或自主導航飛行,這兩種飛行模式下通信系統需采用數傳通信,最大飛行時間則因為抗風因素會有所縮短。以上任何一種飛行模式下相機拍攝角度的控制均需要云臺操作手依據圖傳接收端畫面對云臺進行實時控制。而海上全自主無人機航拍系統與常規影視航拍系統相比,對無人機系統提出了更高的性能指標要求和更多的功能要求,主要表現在對無人機系統的續航能力、起降可靠性、飛行機動性和穩定性、自主飛行和目標跟隨能力、云臺自主目標拍攝能力以及攝像系統和數據傳輸系統等都提出了較為苛刻的要求。
系統需求能力分析
無人機續航能力分析
海上全自主無人機航拍系統采用船上起飛,無人機自主拍攝,數據回傳至遠端控制中心的工作模式,如圖1所示。
假設無人機在1000m高空執行航拍,這就要求無人機有較高的續航能力,從而保證無人機有足夠動力執行爬升、懸停、返航全過程。在不計海風的干擾下:以5m/s的爬升速率計算完成爬升1000m高度則需要3min20s的時間,爬升階段能量消耗率較高,折算成懸停航時約為7-9min。以3m/s下降速率計算,返航降高1000m需要5min33s,該過程能量消耗率相對較低,折算成懸停航時約為3-4min。假設定點懸停任務時間為10min,則執行任務全過程無人機續航能力需求可以表示為:最大無風懸停飛行續航能力為20-23min。再考慮到海面1000m以下的實際風力影響,續航能力指標應設定為:最大無風懸停飛行時間約為30-35min。
無人機起降可靠性與飛行穩定性分析
由于海面風浪較大,這要求無人機能夠在搖擺的甲板上實現安全起降,常規起降方式在該項目中可靠性很低,極有可能在起降階段產生側翻。這就要求采用非常規起降方式,如彈射式起飛或脫鉤式放飛。返航著落方式應設計為軟著落,如在甲板返航點設置回收網,或在海面直接降落。海面直接降落則要求將無人機設計為具備防水功能的兩棲無人機。
此外,無人機的抗風能力應較高,從而保證海上任務過程中的姿態穩定性和航線的保持能力,抗風能力指標應達到5-6級,這一要求與續航能力要求有一定矛盾,在動力配置(電機和槳)較高的情況下,這一矛盾可以消弱。可根據實際任務載荷、抗風等指標來綜合權衡從而選擇或定制更加合適的電機及螺旋槳。
圖像采集與遠距離數據傳輸分析
在100Om高空拍攝海面上高速移動物體對相機的成像精度、變焦能力以及成像速度都有較高要求,可同時掛載兩套云臺和相機分別對高空全景和船體近景細節進行拍攝,需要針對性的選擇高分辨率和高倍變焦相機,對錄像幀數也有一定要求。如要實現圖像在地面指揮控制中心的實時直播,還需選擇遠距離的高清數字圖傳設備。如要同時實現在高空中對細節的高速拍攝與直播,則同時要滿足高倍變焦、高速拍攝以及高速圖像傳輸,這對相機和圖傳以及播放設備都有極高要求,即使滿足所有條件實況直播時肉睛也無法感知,這需進一步探討。可使用高速攝影機近距離獨立記錄與回放。
數據傳輸方案有兩種選擇,第一種方案是無人機與地面控制中心直接通信,這要求將遠距離傳輸設備直接搭載在無人機端,這對無人機載重能力要求較高。第二種方案即分為兩段傳輸,第一段是無人機與船體建立通信,無人機只需搭載1-2km傳輸能力的數據傳輸設備,而遠距離數據傳輸設備作為中繼站放置在船體,由該中繼站與地面控制中心建立第二段通信。
關鍵技術難點及解決方案
在需求分析中已基本闡述該無人機系統應達到的性能指標,與已經相對成熟的影視航拍無人機系統相比,關鍵技術難點及解決方案可以概括如下:
無人機的起飛與降落設計
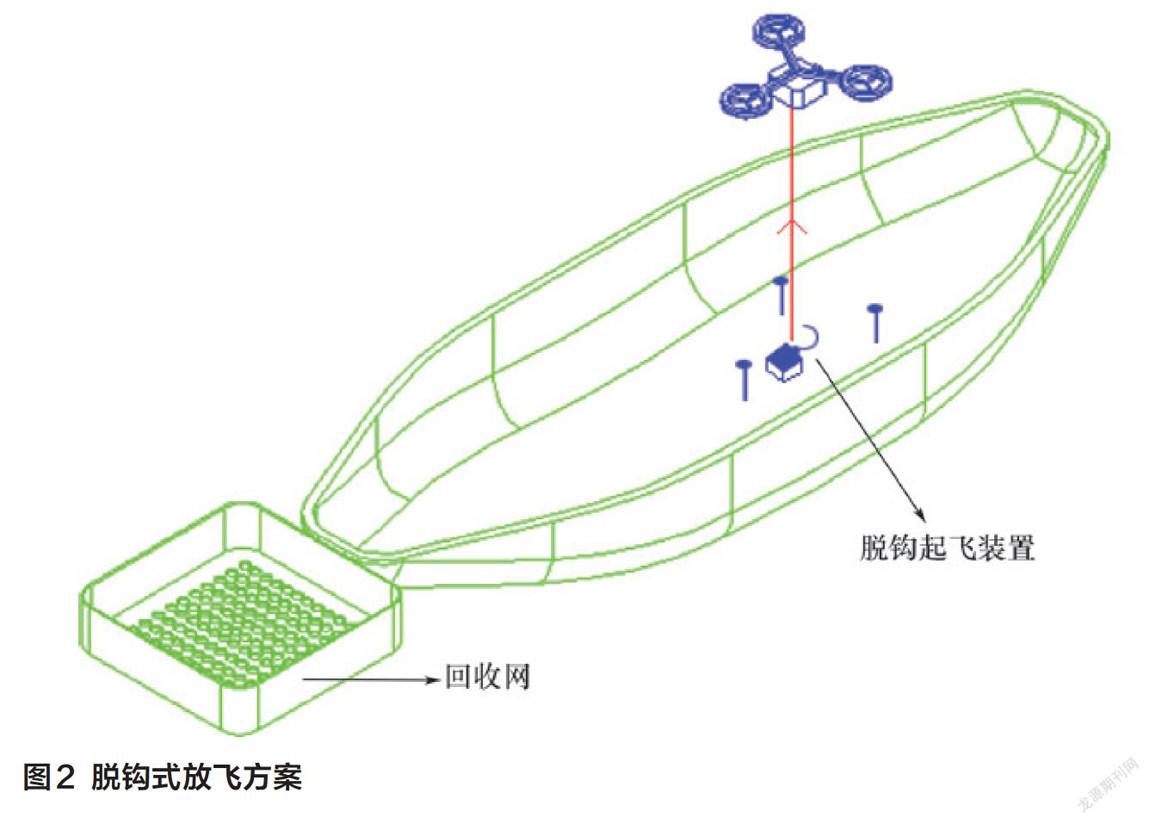
小型船體在海面的低頻晃動較大,常規起降過程中無人機剛離地階段極易受到甲板的晃動擊打到而墜毀。為了保證起降的順利進行,這里給出“脫鉤式放飛”方案,見圖2。起飛前無人機機體與船面三個支撐點保持接觸,觸點帶有凹槽。機體與船體的連接通過安裝在機體中心下方的封閉環與安裝在船體上的倒置掛鉤連接來實現,使得無人機與船體在起飛前保持相對靜止關系。
起飛前無人機首先啟動各個旋翼,當旋翼拉力達到較高值(確保放飛瞬間的向上加速度)時,安裝在船體的倒置掛鉤通過舵機的轉動控制來執行放飛指令。這樣的設計不僅利用了無人機自身的動力系統來實現了快速彈射效果,同時也保證了起飛前無人機處于穩固的待命狀態。
降落則是通過船體安裝回收網來實現,根據GPS定位精度以及無人機特征尺寸,網的特征尺寸應達到4-5m。降落時無人機應飛至回收網正上方一定高度,然后將電機停轉。如果高速移動物體可能導致回收網在任務過程中發生損壞,則需安裝雙層回收網,其間隔應不低于高速移動物體可能導致的破壞范圍。
全自主飛行控制、云臺控制設計
任務全程自主飛行與拍攝過程,涉及到飛行控制與云臺控制兩個方面。
(1)飛行控制
現有技術已具備全自主飛行(絕對航線)的能力,但因為拍攝目標是海面漂浮的船體,如果船體隨著海浪產生位置的漂移,那么飛行控制系統和云臺控制系統需要融入船體位置的自主跟隨技術。實現方法是在船體安裝定位系統將其絕對位置實時傳送給無人機飛行控制系統,飛行控制系統根據船體的絕對位置進行實時計算,依據預先設定的拍攝計劃,對無人機進行實時位置修正,始終保持無人機與船體的相對位置關系。
(2)云臺控制
現有云臺技術是用來消除無人機飛行中的俯仰、橫滾與航向角的低頻晃動與高頻振動,僅用來保證拍攝時相機的穩定性。而自主拍攝所需要的角度等信息,則由飛行控制系統依據船體與無人機的當前坐標、拍攝計劃等數據實時計算出并發送給云臺控制系統。從而實現拍攝航向角、俯仰角的自動調整,使相機準確捕獲畫面。
細節拍攝和全景拍攝很難兩全,這里可采用雙云臺方案。第一套云臺用來全景定焦拍攝,1000m高空全景拍攝時,海平面上的高速移動的物體在全景中移動速度相對較慢,可選擇成像分別率和幀數較高的專業級相機。第二套云臺掛載高倍光學變焦相機來實現在高空下的船體細節同步拍攝,該云臺需要增加變焦控制,方法是通過電機或舵機結合皮帶的傳動來控制相機鏡頭的變焦,高倍變焦下,云臺的增穩精度在的放大的畫面中也會被相應降低,這也需要對云臺增穩精度做進一步優化。這樣無人機在千米高空中即可實現近景細節的拍攝,從而在遠端的實時畫面中呈現船體的細節特征。
無人機的續航能力、機動性與穩定性的綜合權衡與優化
根據需求分析中所擬定相關任務時間,并假定采用無人機與船體中繼通信方案,有效載荷以掛載上述兩套相機及相應云臺、2km數據傳輸設備為準,可以得出該無人機飛行性能應大致滿足以下條件:最大無風懸停飛行時間應達到30-35min,抗風能力應達到5-6級,有效載荷8-10kg。有效載荷不變的情況下,飛行器動力系統配置(電機與槳)額定功率越大,相對有效載荷就越小,續航時間則越長。而動力系統功率配置相同的情況下,選擇不同規格的槳葉,對應的抗風能力(機動性)和續航時間也不同,表現為:抗風性能越強,續航時間越短。
依據上述規則,在安全性允許的情況下,該無人機應盡量使用大功率電機,同時應盡量選擇抗風能力更強的槳葉,適當犧牲續航能力(保證最終續航能力仍滿足條件)。根據經驗,這里給出一套機動性較高的飛行器動力配置方案:電機采用規格φ80×60mm、重量800g,工作電壓50V,螺旋槳規格為26×85,重量80g。室內測試該套動力配置在拉力為5000g時工作電流為約13A,功率約650W,若以該套動力為配置,設計為6旋翼方案,飛行器平臺(不合有效載荷及電源)總重約為8-10kg,若采用平鋪式布局,對邊電機軸距為1500mm,最大特征尺寸2160mm,如采用共軸式(3軸6旋翼)設計最大特征尺寸為1660mm。搭配電池最佳匹配規格為12S 50000mah鋰電池,重約11-13kg。依據上述數據中間值,無人機起飛總量約為30kg,最大無風懸停飛行時間約為38min,抗風能力為5-6級。
考慮到評估誤差,該飛行器設計方案也至少能夠達到30-35min無風懸停時間(其它性能指標不變),已滿足無人機僅與船體中繼通信方案對飛行器性能的需求。在飛行器設計與綜合方案上還可做進一步優化,無人機整備重量仍有至少2-3kg的優化空間。也可采用上述動力配置的8旋翼方案,在有效載荷不變的情況下進一步提升續航時間6-8min。或續航時間不變的情況下有效載荷可提升至12-15kg,在該有效載荷下若能滿足承載遠距離數據傳輸系統的重量,該8旋翼方案也可作為無人機與地面控制中心直接通信方案下的載機。
結束語
通過對海面無人機全自主航拍系統項目需求的分析,可以看到有諸多技術難點。從無人機在船體的起降、飛行控制和云臺控制的智能化以及無人機的飛行性能等關鍵技術難點和提出的解決方案來看,每一個難點都可在現有研發技術的基礎上通過新的設計方法或更合理的動力配置、載荷分配等得到解決,沒有技術瓶頸,本方案也具有很高的短期內可實現性。同時,該無人機系統在其他對自主能力要求很高的航拍領域也具有非常高的應用價值。(參考文獻:略。如有需要,請聯系編輯部。)
猜你喜歡
發明與創新(2022年30期)2022-10-03 08:40:56
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
動漫星空(興趣百科)(2020年12期)2020-12-12 05:31:40
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
人大建設(2018年6期)2018-08-16 07:23:10
文理導航·科普童話(2017年5期)2018-02-10 19:42:14
家庭影院技術(2017年9期)2017-09-26 03:41:45