無人機機載拖曳干擾實現
2019-09-10 10:30:49呂曉林
無人機 2019年4期
呂曉林


機載拖曳干擾是一種新的自衛式干擾方式,通過拖纜牽引誘餌,對敵方雷達產生射頻干擾,可逼真模擬載機的航速、航向及雷達反射特性,使雷達無法通過運動特性來區分載機和誘餌,提高了載機的生存能力。
隨著科學技術的發展,爭奪電磁戰場控制權成為決定局部戰爭勝負的關鍵。二十世紀末國外第三代戰斗機已普遍裝備機載拖曳干擾設備,有必要對其組成、工作原理進行分析,結合國內實際情況,對機載拖曳干擾實現進行研究,探討機載拖曳干擾保障能力的實現。
機載拖曳式干擾設備組成、工作原理
機載拖曳干擾設備組成
機載拖曳干擾設備一般由機上設備、拖纜及投放裝置、拖曳誘餌等組成。機上設備包括雷達信號接收機、干擾信號產生器、控制器和電源等;拖纜主要由光纜、電纜和承力纜組成;投放裝置含絞盤和投放器等;拖曳誘餌含光電轉換器、功率放大器、發射天線等。
機載拖曳式干擾原理
載機偵測收到雷達信號后,釋放拖曳誘餌,拖曳式誘餌內裝有放大轉發器,對雷達信號進行放大轉發,與載機雷達回波信號一起對雷達形成雙點源干擾,對于非相參干擾,誘餌產生的效果是使雷達跟蹤兩點源能量中心上;對于相參干擾,將產生合成場,在合成場作用下雷達跟蹤能量較大的點源,雷達天線跟蹤軸偏離目標,從而提高飛機的存活率。
拖曳干擾實施時機
誘餌釋放時,應保證飛機和誘餌對雷達形成的張角小于雷達的角分辨率。在距離上應保證飛機和誘餌對雷達形成的距離差小于雷達的距離分辨率,在速度上應當保證飛機和誘餌相對于雷達的徑向速度差小于雷達的速度分辨率。
(1)尾追攻擊時的戰術措施
當載機發現有導彈進行尾追攻擊時,載機應加速向導彈攻擊同一方向高速飛行,并投下拖曳誘餌,在方位、距離和速度上讓導彈穩定跟蹤誘餌,此時的誘餌與載機的距離、速度、角度基本一致,制導雷達難以分辨,而誘餌很容易捕獲制導雷達的距離、速度跟蹤波門。
(2)攔截攻擊時的戰術措施
當導彈距離載機較遠時,立刻轉向,并加速向導彈飛行方向機動,盡快變為“尾追攻擊”的態勢,然后選擇時機,突然向左或向右急轉彎,構成“三角態勢”。
(3)迎頭攻擊時的戰術措施
迎頭攻擊時,導彈和載機的相對速度很高,它們之間的距離一般不會太遠,此時很難進行180°的大轉彎,只能向左或向右急轉并加速飛行,盡快形成“三角態勢”,以便利用誘餌的強干擾能量把導彈吸引過去,或者使導彈從載機和誘餌中間穿過。干擾實施時機如圖1所示。拖曳干擾國內外現狀和發展趨勢
國內外現狀
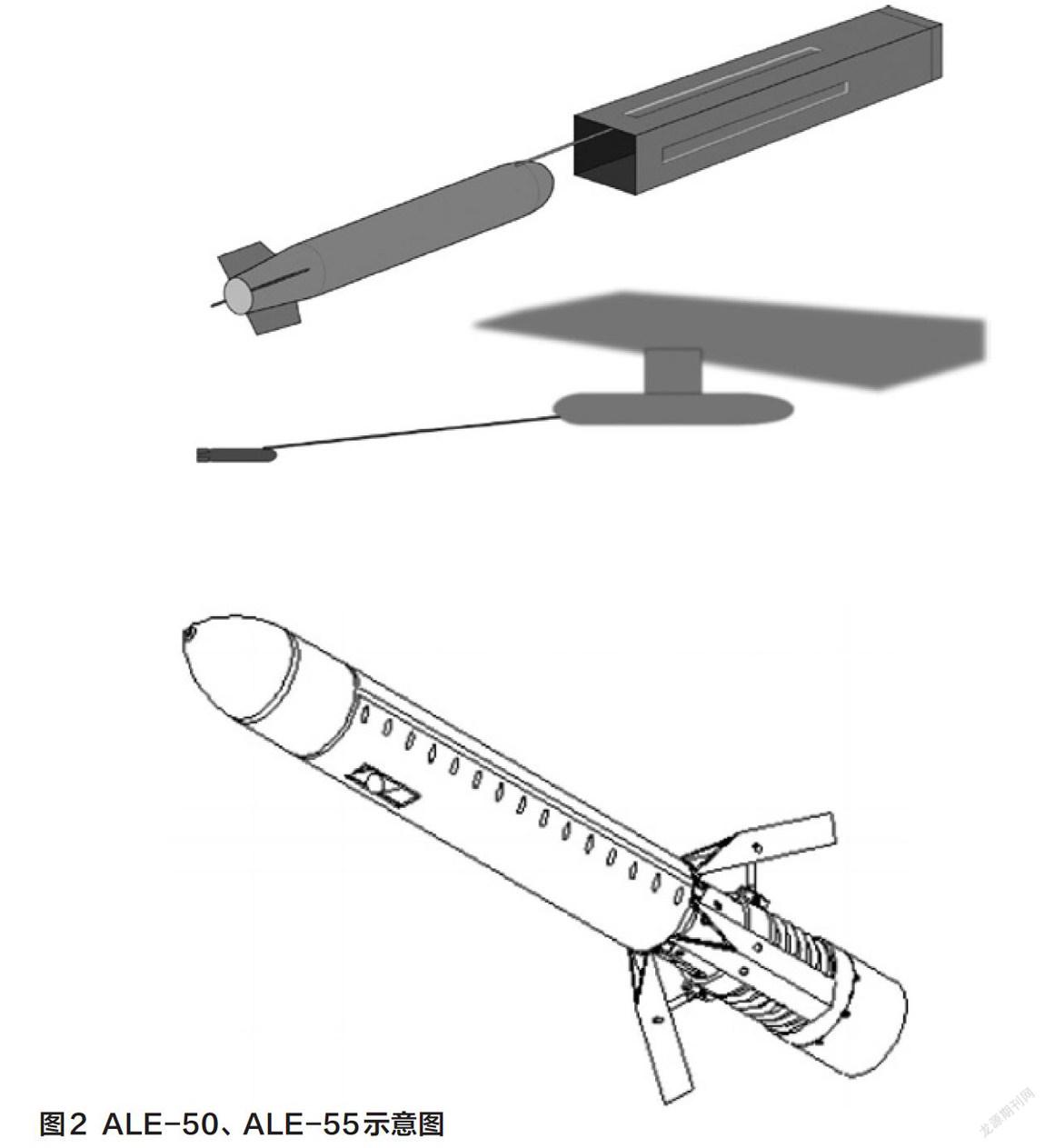
AN/ALE-50拖曳誘餌系統是一種機載電子反制系統,廣泛部署于美軍各型戰機上。AN/ALE-50系統包括一具發射/控制裝置和多枚誘餌,每枚誘餌均安裝于密封的金屬容器內。ALE-50拖曳式誘餌是簡單的轉發型誘餌,誘餌放在一個有電纜卷軸的發射筒中,誘餌在使用后丟棄。設備由飛機供電,有獨立的威脅信號接收和干擾信號發射模塊,誘餌一旦接收到威脅信號就將信號放大并轉發出去,ALE-50還可對威脅信號進行簡單的調制,欺騙雷達跟蹤。
為了提高拖曳誘餌的干擾能力,新研了ALE-55光纖拖曳式誘餌,如圖2所示。ALE-55光纖拖曳式誘餌具有很寬的頻率覆蓋范圍,不僅能轉發威脅雷達信號,而且還能利用飛機上干擾機產生的欺騙信號來誘騙來襲導彈。
目前,西方國家主要裝備的拖曳式有源雷電干擾誘餌有:英國馬可尼雷達和防御系統公司的“瞪羊”誘餌、美國雷聲公司的AN/ALE-50、桑德斯公司的AN/ALE-55、瑞典攝氏技術電子公司的B02D和德國戴姆勒一克萊斯勒航空公司的“空中蜂鳴器”。
發展趨勢
拖曳式有源誘餌經歷了兩個發展階段,第一階段的誘餌主要由電纜拖引在載機后方,誘餌將載機傳輸過來的雷達調制信號或其它噪聲信號進行簡單轉發,第一代拖曳式誘餌工作帶寬較窄,工作頻率低。隨著光纖傳輸線的應用,機載電子戰對抗偵察系統能夠對截獲的高頻段寬帶雷達信號進行復雜的調制,通過光纖傳輸給誘餌,由誘餌負責轉發,進一步提高干擾效果。
經過不斷改進,拖曳誘餌能發射欺騙和壓制性雷達干擾信號,同時將干擾發射天線設計成一個全方位的雷達角反射器,可以模擬一架飛機的雷達反射信號,使飛機具備主動/被動綜合干擾能力。機載拖曳干擾實現方式
無人機拖帶誘餌
拖曳干擾系統由機載雷達偵查告警設備、控制與投放吊艙、拖曳誘餌、拖纜等組成。吊艙安裝在無人機機翼下,拖曳誘餌掛載在吊艙下方。控制與投放裝置接收到投放指令后,施放拖曳誘餌,載機通過拖纜拖帶誘餌飛行。無人機與拖曳誘餌之間的拖纜內有光纖,可進行數據傳輸,拖曳誘餌對收到的雷達信號進行光電轉換、放大、轉發,拖曳誘餌工作參數可通過無人機測控鏈路下傳到地面。
(1)拖曳誘餌
干擾設備集成于拖曳誘餌體內,采用電池供電,拖曳體安裝有穩定尾翼,以保持拖曳時的穩定飛行。
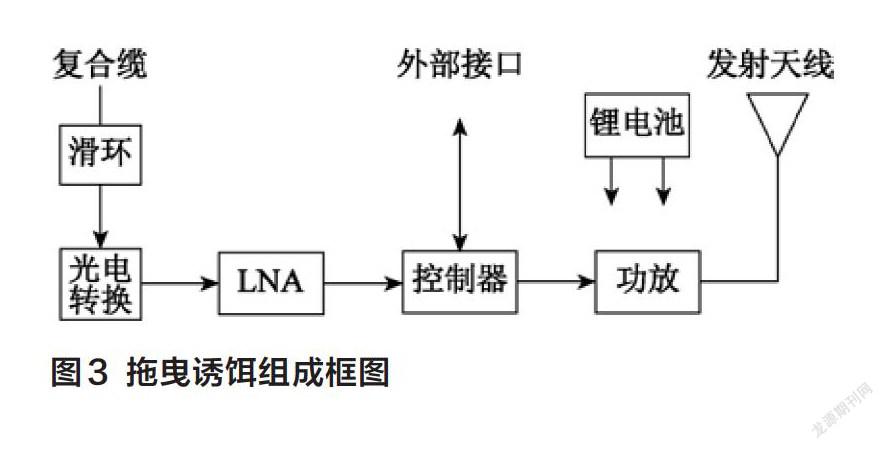
干擾設備由光電轉換器、低噪聲放大器、控制器、功放、發射天線及鋰電池等組成,組成框圖如圖3所示。
(2)吊艙
吊艙由控制與投放裝置、拖纜等組成。控制與投放裝置可用在施放前通過鎖閉機構攜載拖曳誘餌飛行,在接收到投放指令后,施放拖曳誘餌。控制與投放裝置由控制器、拖曳體攜載與鎖閉機構、線纜施放機構、斷纜機構等組成。拖曳體攜載與鎖閉機構可以保證施放前拖曳誘餌的可靠掛載,控制器接收到投放指令后,控制鎖閉機構開鎖,使拖曳誘餌與無人機分離。線纜施放機構可保障拖曳體的平穩施放,線纜施放到預定長度后,施放機構自動鎖緊。控制器接收到斷纜指令后,控制斷纜機構切斷拖纜。
(3)拖纜
拖纜主要承受拖帶誘餌飛行時的拖帶張力,需根據受力情況選取合適的材料與線徑,拖纜長度不小于100m。
為了實現載機與拖曳誘餌之間數據傳輸功能,拖纜采用復合纜。線纜中間布置數據傳輸線,外層為承力結構以承受線纜張力。為防止拖曳飛行過程中拖纜產生旋轉,采用滑環與拖曳體連接。
(4)無人機
根據作戰任務對無人機飛行性能要求,機載雷達偵查告警設備對無人機的有效載荷、空間、供電要求,吊艙和拖曳誘餌氣動特性、結構重量對無人機機翼掛載能力要求以及拖曳誘餌投放后在拖帶飛行過程中和母機不發生干涉對母機氣動外形、結構布局的要求,選擇合適的無人機作為母機。目前國內有多款大型無人機可作為拖曳干擾飛行平臺。
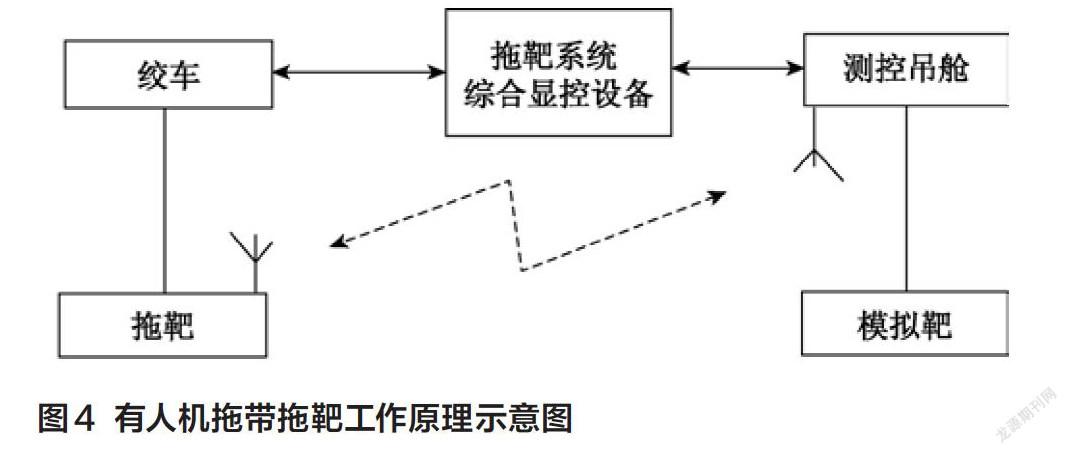
(5)有人機拖帶拖靶
拖曳干擾系統由絞車、測控吊艙、拖靶、模擬靶、拖靶綜合顯控設備、拖纜等組成,干擾設備集成在拖靶體內。拖靶和絞車之間通過鋼制拖纜連接,在一定預緊力作用下吊掛在絞車下,絞車通過制式掛架安裝在有人飛機機翼下。絞車和測控吊艙與飛機通過機內電纜進行數據傳輸,拖靶和測控吊艙通過無線鏈路進行數據傳輸,絞車、測控吊艙和拖靶工作狀態參數顯示在拖靶綜合顯控設備上,飛行員通過拖靶綜合顯控設備控制絞車收放拖靶。其工作原理如圖4所示。
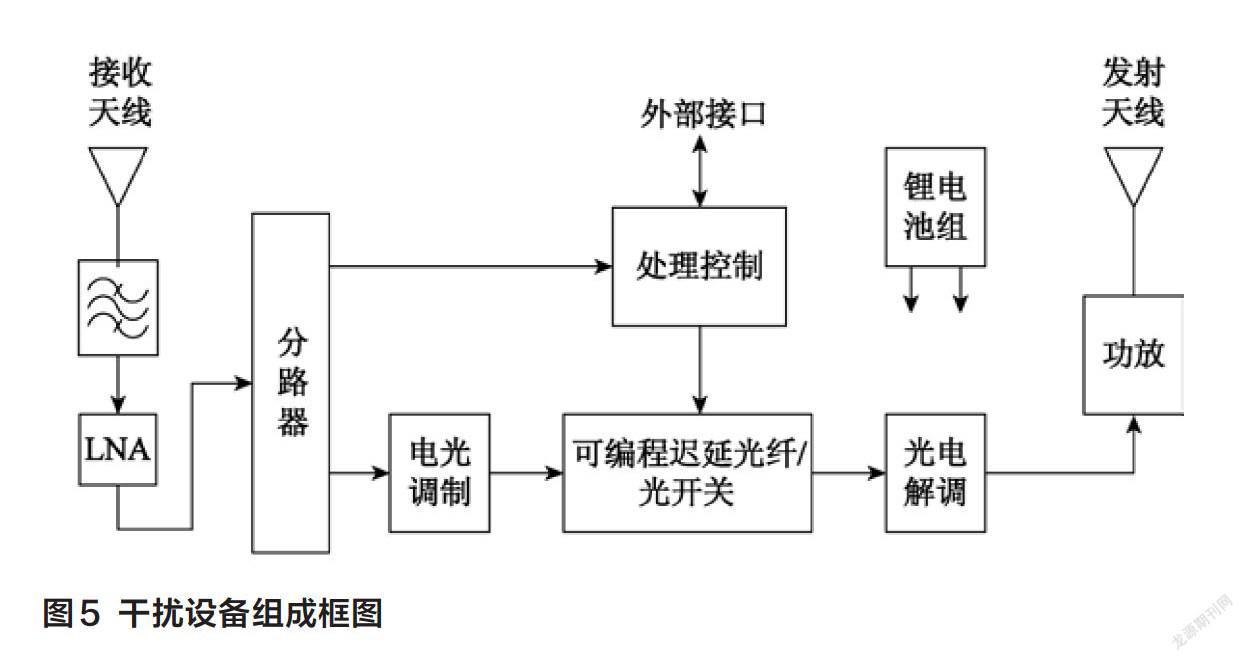
干擾設備由接收天線、光纖存儲、處理控制、功放、發射天線及鋰電池組成。接收天線接收雷達信號,經濾波、放大后分為兩路,一路進入光纖存儲系統,電光調制后,經過可編程的遲延光纖延遲線,完成對雷達信號的存儲;光電解調、信號放大后經發射天線輻射出去。另外一路送給處理控制模塊,完成對雷達信號的檢波測量,根據測量結果,控制光纖存儲設備中延遲線抽頭,實現對雷達信號轉發延時;同時處理控制模塊對整個設備進行監測,將設備工作狀態參數上報。干擾設備組成如圖5所示。
拖曳干擾主要有待機和干擾兩種工作狀態。
(1)待機狀態
拖靶被釋放后,干擾設備進入待機工作狀態,此時僅處理控制等低功耗設備加電工作,處理控制單元對雷達信號進行檢測,一旦發現存在有雷達信號,則轉入干擾狀態。
(2)干擾狀態
根據檢測到的雷達信號時域參數,處理控制單元控制光纖存儲設備的轉發時延量,并控制功放進入功率放大狀態,對雷達進行轉發干擾。
上述兩種實現方式各有優劣,有人機拖帶拖靶采用光纖存儲雷達信號方式,具有損耗低、保真度高等特點,和數字存儲方式相比,設備功耗低,同時拖靶通過絞車進行收放,可回收拖靶,費效比高,適用于訓練演練,不適合實彈射擊使用;無人機拖帶誘餌雖然誘餌內干擾設備簡單,但干擾樣式多、模擬逼真度高,由于誘餌不可回收,適用于實彈射擊,不適合訓練演練使用。兩者互補性強,可根據實際情況,選擇使用。
結論
通過分析機載拖曳干擾原理和實施過程,針對任務需求,利用有人機拖帶拖靶、拖靶內加裝干擾設備和無人機拖帶誘餌實現了機載拖曳干擾,為后續相關任務開展提供參考和借鑒。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
設備管理與維修(2015年12期)2015-04-09 06:57:00