無刷直流電機的轉子位置檢測新策略
2019-09-10 07:22:44楊勝浩李俊良趙建營
河南科技 2019年31期
楊勝浩 李俊良 趙建營





摘 要:在電機速度控制系統中,轉子位置檢測至關重要。通過分析反電動勢法及其改進方法可知,當電機在低速運行時,反電動勢過零檢測法的幅值太小而無法被檢測到。對此,本文提出了一種新的轉子位置檢測方法,并對該方法進行仿真分析。該方法通過檢測線端電壓差的過零點,然后延遲90°機械角得到轉子位置信號。仿真結果表明,當電機低速運行時,新方法均能準確獲取到轉子位置信號,電機有更寬的運行范圍。
關鍵詞:無刷直流電機;無位置傳感器;線端電壓差
中圖分類號:TM33 文獻標識碼:A 文章編號:1003-5168(2019)31-0047-03
Novel Strategy for BLDC Motor Rotor Position Detection
YANG Shenghao LI Junliang ZHAO Jianying
(CAMA(LuoYang) Electronics Co., Ltd.,Luoyang Henan 471003)
Abstract: In the motor speed control system, rotor position detection is very important. By analyzing the back EMF method and its improved method, it can be seen that when the motor is running at low speed, the amplitude of the back EMF zero crossing detection method is too small to be detected. In this paper, a new rotor position detection method was proposed, and the simulation analysis of the modified method was carried out. By detecting the zero crossing point of the line terminal voltage difference, and then delaying 90° mechanical angle, the rotor position signal is obtained. The simulation results show that when the motor runs at low speed, the new method can get the rotor position signal accurately, and the motor has a wider range of operation.
Keywords: Brushless DC motor;position sensorless;line terminal voltage difference
1 研究背景
無刷直流電機(Brushless Direct Current Motor,BLDCM)在調速系統中占有重要地位,其性能直接決定系統性能的好壞。無刷直流電機采用電子換相,需要通過位置傳感器獲取轉子位置信號,以控制電子換相裝置完成換相,因此轉子位置信號的獲取至關重要。目前,我國工業控制中使用的無刷直流電機大多數是通過電子或機電式位置傳感器直接檢測電機的轉子位置信號[1],但在檢測時,仍存在較多問題。一方面,當電機工作于高溫、高壓、潮濕等惡劣環境時,位置傳感器的性能將會降低,甚至不能正常工作;另一方面,位置傳感器的安裝和安裝精度,以及位置傳感器與電機之間的眾多連線,不僅導致電機的體積、制造成本增加,工藝難度提高,而且直接影響電機的運行性能和運行可靠性[2,3]。
國內外提出的無位置傳感器轉子位置的檢測方法有反電動勢過零檢測法、續流二極管法、電感法和狀態觀測器法等[4]。反電動勢過零檢測法的原理是通過檢測不導通相反電動勢過零點并延遲30°可得無刷直流電機的實際換相時刻[5]。在反電動勢過零檢測法基礎上改進的轉子位置檢測方法有線反電動勢法、相電壓法、線相電壓法和端電壓法[6-8]。這些方法共同的不足是當電機低速運行時,被測量的幅值很小或為零,檢測誤差較大或檢測不到,導致電機換相失敗。由此,本文通過分析和計算得到一種改進的轉子位置檢測方法。
2 線端電壓差值過零檢測法原理
三相方波無刷直流電機主回路采用三相全橋驅動的控制方式,每一時刻只有兩相處于導通狀態,另一相處于懸空狀態,每60°換相一次,一個周期有6次換相。三相方波無刷直流電機主回路結構如圖1所示。圖1中的A、B、C分別代表電機三相繞組。為了分析方便,進行如下假設[9]:①電機三相繞組采用星型結構,繞組對稱且相位在空間上相差120°;②忽略渦流損耗和磁路飽和;③不計三相繞組電樞反應;④電機三相繞組電阻、自感和互感均為常數且相同。
根據以上假設,無刷直流電動機端電壓方程的矩陣為:
[UAUBUC=R000R000RiAiBiC+L-M000L-M000L-MPiAiBiC+eAeBeC+UNUNUN]? ? ?(1)
式中,[UA]、[UB]、[UC]分別為電機三相定子繞組端電壓,[R]為定子繞組電阻;[P]為微分算子;[L]為定子繞組等效自感;[M]為定子繞組等效互感;[iA]、[iB]、[iC]為三相定子電流;[eA]、[eB]、[eC]為三相定子繞組反電動勢;[UN]為電機三相繞組電機中點電壓。
在非換相區間,以A、C兩相導通和B相為非導通相為例進行分析,假定電流從A相流到C相,即[ic=-ic=I],[eA=-ec=E],[eB∈-E,E],由于電機三相定子繞組Y形連接,三相電流滿足式(2):
[iA+iB+iC=0]? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? (2)
由式(1)得到線端電壓差為:
[UABCA=UAB-UCA=3RiA+3L-MPiA+3eA-eB]? ? ? (3)
[UBCAB=UBC-UAB=3RiB+3L-MPiB+2eB]? ? ? ?(4)
[UCABC=UCA-UBC=3RiC+3L-MPiC+3eC-eB]? ? ? ? (5)
其中,[UAB]、[UBC]、[UCA]為端電壓差。因為A、C為導通相,B相為非導通相,在非換相區間,如果非導通相繞組在其整個關斷期間無續流,那么,[iB]=0,式(4)可以進一步化簡為:
[UBCAB=UBC-UAB=2eB]? ? ? ? ? ? ? ? ?(6)
從(6)式可以看出,在非換相期間,當B相不導通且其繞組內部無續流流過時,電動勢[eB]只與線端電壓差[UBCAB]有關,且是二倍關系,所以,在電機低速運行時,和其他幾種方法相比更易檢測到過零點。因此,在非換相期間,B相不導通時,線端電壓差[UBCAB]的過零點就是反電動勢[eB]的過零點。
在非換相期間,對于A、C兩相,因為[iA]和[iC]變換緩慢,其微分值很小,并且定子繞組[R]值也很小,為了便于分析,忽略其影響。式(3)和式(5)可以化簡為:
[UABCA=UAB-UCA=3eA-eB]? ? ? ? ? ? (7)
[UCABC=UCA-UBC=3eC-eB]? ? ? ? ? ? ? (8)
由式(7)和式(8)可以看出,線端電壓差[UABCA]、[UCABC]只與反電動勢有關系。當[eB]在區間[[-E,E]]變化,線端電壓差[UABCA∈4E,2E]、[UCABC∈-2E,-4E]。
綜上所述,在整個B相斷開期間,三相線端電壓差幅值始終比較大。同樣,對A相或者C相斷開進行分析,上述結論仍然成立。以上結論成立的條件是:斷開相繞組在非換相期間無續流電流流過,而斷開相繞組有無續流電流取決于調制方式。研究證明[10],H-PWM-L-PWM調制方式在關斷期間沒有續流,所以選用H-PWM-L-PWM調制方式。
3 MATLAB/Simulink環境下無刷直流電機仿真模型設計
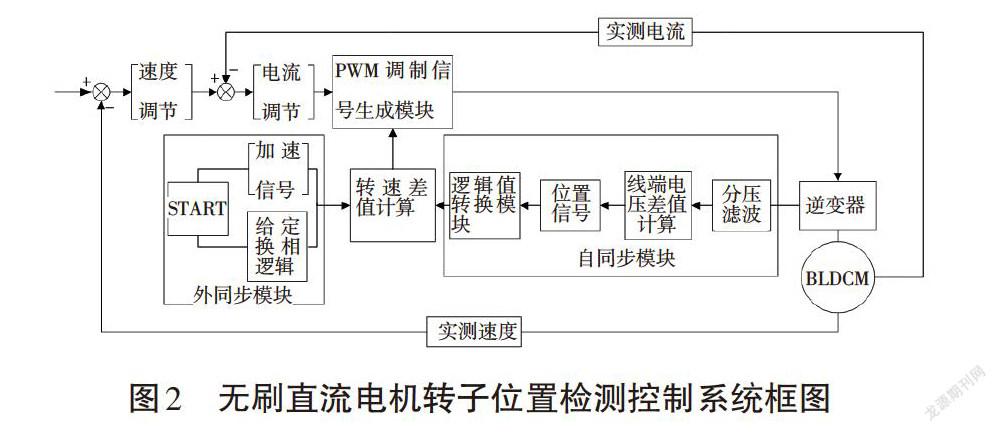
為了驗證該方法,無刷直流電機轉子位置檢測控制系統采用調整轉速的方式,電流雙閉環控制策略如圖2所示。在轉速較低的情況下,反電動勢很小或者為零,工作在外同步階段,需要采用專門的起動電路。當電機達到給定轉速,切換至自同步階段。
3.1 外同步模塊
外同步模塊主要完成外同步階段電機的起動。本文采用“三段式”起動法[11]:轉子預定位、加速階段和同步切換階段。首先,轉子在給定的換相邏輯下,使磁極轉到預設位置。預定位完成以后,電機在給定加速信號和換相邏輯信號下完成加速。當電機達到一定的轉速,自動切換至自同步階段運行。
3.2 自同步模塊
自同步模塊主要完成延遲90°-[a]換相。端電壓經過濾波,會導致后端電壓波形產生延遲。延遲角度[a]的大小區取決于電機的運行速度,相關公式為:
[a=tan-12πRR1Cp60(R+R1)n]? ? ? ? ? ? ? ? ? ?(9)
其中,分壓電組[R]和[R1]、濾波電容[C]和電機極對數[p]均由電路自身決定。由此可以看出,延遲角[a]隨著轉速的增大而增大。當轉速[n]=1 000r/min時,濾波產生的延遲角[a>30°]。所以檢測到線端電壓過零點后,不再是延遲[30°-a]換相,只能采用[90°-a]換相方法,這樣可以避免[a>30°]時過零檢測失敗。
4 無刷直流電機控制系統仿真
基于給定參數在電機低速運行時驗證本課題方法能準確換相。
圖3是給定轉速30r/min下電流和線端電壓差值與過零信號的仿真波形。從圖3可以看出,在電機低于50r/min時,轉速波形良好,系統依然能夠精確檢測到線端電壓差過零點,獲得轉子位置信號,控制電機正確換相。
對線反電動勢過零檢測法與線端電壓差值過零檢測法進行比較分析,圖4是給定轉速30r/min下線反電動勢過零檢測法轉速和線反電動勢與線端電壓差值過零信號仿真波形圖。從圖4可以看出,其轉速波形呈現周期性波動,整個仿真期間僅檢測到一次過零點,換相點丟失。而線端電壓差值過零檢測法在同樣的仿真時間段檢測到三次過零點,不會錯失換相點,其靈敏度較高。因此,傳統檢測方法只適用于轉速大于50r/min,但新的檢測方法適用于更低的轉速。
綜上所述,本文設計的新檢測方法和其他轉子位置檢測方法相比,其優勢在于位置信號獲取精確度和靈敏度高。試驗和仿真結果表明,本文提出的轉子位置檢測方法能實現低速運行,制造成本較低,提高了電機工作在高溫、高壓、潮濕等惡劣環境中的可靠性,能滿足實際需要。
參考文獻:
[1]吳鵬坤,賈琴妹.無位置傳感器無刷直流電機控制系統仿真研究[J].伺服控制,2011(4):29-33.
[2]夏長亮.無刷直流電機控制系統[M].北京:科學出版社,2009.
[3]張琛.直流無刷電動機原理及應用[M].2版.北京:機械工業出版社,2006.
[4]譚建成.永磁無刷直流電機技術[M].北京:機械工業出版社,2011.
[5]劉剛,王志強,房建成.永磁無刷直流電機控制技術與應用[M].北京:機械工業出版社,2008.
[6]焦曉磊,高延麗,潘勁.無刷直流電機無位置傳感器控制系統仿真及試驗研究[J].電機與控制應用,2013(10):36-39.
[7]郭研岐,李紅.無位置傳感器無刷直流電機換相點自校正控制方法研究[J].微電機,2013(2):59-62,70.
[8]鄒繼斌,江善林,張洪亮.一種新型的無位置傳感器無刷直流電機轉子位置檢測方法[J].電工技術學報,2009(4):48-53.
[9]范冰潔,李玉忍,陳永祿.基于遺傳算法的無刷直流電機控制參數優化[J].計算機仿真,2009(8):188-191,198.
[10]李春海,汪海寧.不同PWM調制方式下無刷直流電機非導通相續流分析[J].微特電機,2013(6):39-41,49.
[11]劉海亭,汪劍鳴,竇汝振,等.無刷直流電機啟動過程仿真研究[J].計算機仿真,2012(1):389-394.
