時滯不確定線性系統最優濾波
2019-09-12 11:55:00郭小春
山東農業大學學報(自然科學版) 2019年4期
郭小春
時滯不確定線性系統最優濾波
郭小春
泰山學院信息科學技術學院, 山東 泰安 271021
針對線性時滯不確定系統,應用重組觀測分析和完全平方方法,提出了一種簡單有效的最優濾波算法。首先將時滯濾波問題轉化為非時滯問題,然后通過求解Lyapunov方程以及與原系統維數相同的+1個Riccati矩陣方程,給出濾波器的設計,最后通過一個仿真實例說明該算法的正確性和有效性。
時滯系統; 線性; 濾波
線性最優濾波理論是現代控制理論中的一個基本問題,對于無時滯系統,著名的Kalman濾波理論已經提出了圓滿的解決方法,其結果是基于微分或差分Riccati方程設計濾波器[1]。然而對時滯系統的估計問題,經典的Kalman濾波方法已經不再適用。因此,幾十年來,線性時滯系統濾波的研究已經引起了專家學者關注,并且已提出許多方法[2-5],例如線性矩陣不等式方法、狀態擴維方法和無限維理論等方法。
不確定性廣泛存在于通信系統、網絡擁塞控制等許多工程領域,眾多學者已對不確定線性系統最優濾波問題提出了不同算法[6-8]。針對觀測方程中有相互獨立的隨機不確定線性系統,Nahi設計出了遞推的線性最小方差濾波器[6]。后來Hadidi等人擴展了Nahi的工作,研究了觀測中的不相互獨立的隨機不確定線性系統的濾波問題,同時給出了濾波器的設計算法[7]。Hermoso Carazo等人針對狀態噪聲和觀測噪聲都是有色噪聲的情況研究了不確定系統的濾波問題,設計出了理想的濾波器[8]。考慮帶有隨機參數不確定的線性時變系統,應用線性矩陣不等式方法,通過計算一個凸優化問題,Wang和Balakrishnan提出了魯棒Kalman濾波算法,保證了每一步估計誤差的方差最小,同時進一步論證了當狀態矩陣是時不變且均方穩定的情況下,該算法是收斂的[9]。應用類似方法,Wang和Balakrishnan又進一步研究了隨機不確定系統的魯棒穩態Kalman濾波問題[10]。不一而足[11-13]。以上所考慮的系統都是非時滯系統。對觀測中含有定常時滯的線性系統,應用新息分析理論,有效地解決了最優濾波問題[14-16]。然而,觀測中含有定常時滯的線性不確定系統的濾波問題仍需進一步研究。
針對觀測中帶有多個定常時滯的線性不確定系統,本文將研究最優濾波問題。應用完全平方和觀測重組方法,通過計算+1個Riccati方程和一個Lyapunov方程,設計最優濾波器。
為了描述方便,在本文中,給出了如下的符號記號:
(1)表示矩陣轉置
(2)R表示實維歐氏空間

(4)[·]表示數學期望
(5)符號⊕表示塊對角矩陣
(6){·}為列向量
1 問題闡述
設帶有l個時滯觀測的離散時不變系統


k=-d,=0,1,…,

并滿足如下三個假設:
假設1:Prob{(k)=1}=且Prob{(k)=0}=1-.其中為已知常數。
假設2:噪聲(),(j)()和初始狀態(0)為互不相關的零均值白噪聲,且方差分別為
假設3:時滯d,=0,1,…,滿足0=0<1<…d.

本文問題如下:

注1:本文所研究的問題廣泛存在于信號檢測、通訊、網絡控制等各種工程領域[7,12]。
注2:對1,原始系統(1)-(2)為非時滯不確定系統,濾波器的設計問題已存在完善的結果[4,5]。因此,本論文主要討論k≥d時的濾波器的設計問題。
2 濾波器設計
2.1 重組觀測
為了設計時滯系統的濾波器,首先重組觀測序列,目的是將時滯觀測轉化成非時滯觀測。注意到y(),=1,…,是狀態(k)在時刻量測,包含有時滯d,為了使時滯觀測轉化成非時滯觀測,導出重組觀測方程
y()=H()()+v(),=+1,…,1 (3)

下面引理闡述了原始觀測序列與重組觀測序列的聯系。


2.2 主要結果

讓

為狀態估計誤差的協方差矩陣。

根據上面討論,給出如下結果。


其中:

和

并且:


將(1)代入(11),整理得

其中



且有Δ(-1,)=-(-1,)H-(-1,)。
對式(13)右邊完全平方,利用(10),得
因為式(14)中第二項與(-1,)和(-1,)無關,所以選擇(-1,)和(-1,)使上式第一項、第三項為零,從而極小化式(14),得證式(7)和(8)。
為了計算濾波器,需進一步給出估計誤差(|,)的計算。
引理3:估計誤差協方差矩陣(|,),k<≤k-1,=+1,…,滿足

其中初始值為(0|0,+1)=0和(k|k,+1)=(k|k,),并且P(-1,)和W(-1,)分別由(9)和(10)給出。
證明根據(7)、(8)和(14),結論易得。

注4:顯然,由于時滯的存在,傳統的Kalman方法不適合于系統(1)-(2)。利用重組觀測和完全平方方法,定理1給出了線性最優濾波器的設計算法。


注意到,o1時,原始系統(1)-(2)變成了[11]中考慮的系統模型(2.1)-(2.2)。進一步觀察濾波器(17)經過簡單的變換即為[11]中所得到的濾波器(3.20)。
3 數值例子
本節給出一個數值例子闡明論文提出方法的有效性。


假設噪聲(),(0)()和(1)()是互不相關的白噪聲,方差為0.3,進一步假設=0.93。 應用MATLAB仿真軟件,根據定理1,線性最優濾波器的仿真結果將展示在圖1和圖2中。可以清晰地看出狀態估計曲線能夠很好地跟蹤原始狀態,進一步說明了所提出新算法的有效性。
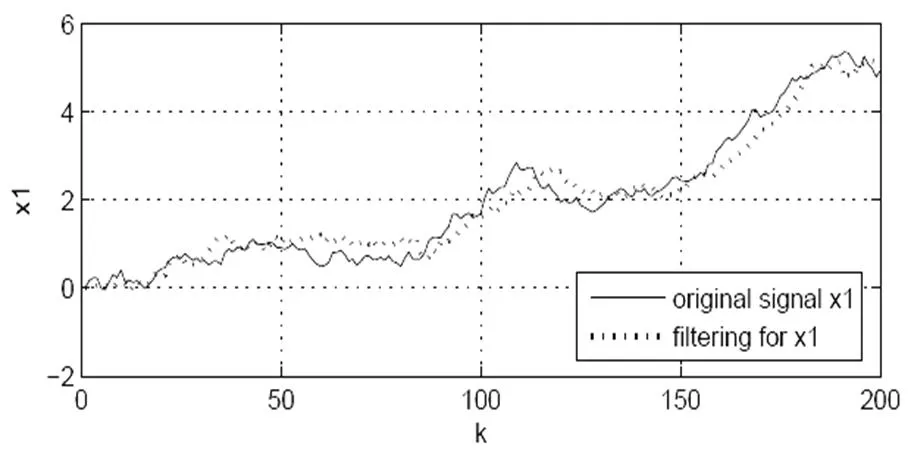
圖 1 信號1的濾波器跟蹤性能
Fig.1 Filter tracking performance of the signal1
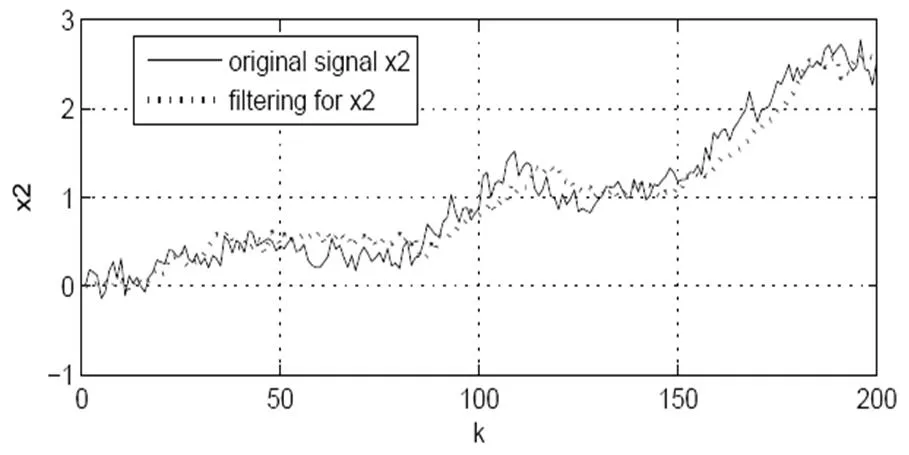
圖 2 信號x2的濾波器跟蹤性能
4 結語
利用完全平方和重組觀測技巧,本文研究了觀測中含有不確定參數的線性定常時滯系統的線性最優濾波問題。通過重組觀測,使一個時滯濾波問題轉化為非時滯濾波問題,進一步應用完全平方技巧,使線性最優濾波器的計算歸結為計算+1個與原系統有相同維數的Riccati方程和一個Lyapunov遞推等式。該方法無需狀態擴維,計算簡單。
[1] Kailath T, Sayed AH, Hassibi B. Linear estimation[M]. Englewood Cliffs, NJ: Prentice-Hall, 1999
[2] Zhang H, Xie L. Control and estimation of systems with input/output delays[M]. Heidelberg Berlin: Springer-Verlag, 2007
[3] Fridman E, Shaked U, Xie L. Robust2filtering of linear systems time delays[C]. Nevada,USA: Proc of 41th IEEE Conf. Decision Contr., Las Vegas, 2002:3877-3882
[4] Hou W, Fu M, Zhang H,. Consensus conditions for general second-order multi-agent systems with communication delay[J]. Automatica,2 017,75:293-298
[5] Qiu Z, Liu S, Xie L. Distributed constrained optimal consensus of multi-agent systems[J]. Automatica, 2016,68:209-215
[6] Nahi NE.Optimal recursive estimation with uncertain observation[J]. IEEE Trans.Infor. Theory, 1969,15(4):457-462
[7] Hadidi MT, Schwartz SC. Linear recursive state estimators under uncertain observations[J]. IEEE Trans. Automat. Contr., 1979,24(6):944-948
[8] Hermoso CA, Linares PJ. Linear estimation for discrete-time systems in the presence of correlated disturbances and uncertain observations[J]. IEEE Trans. Automat. Contr., 1994,39(8):1636-1638
[9] Wang F, Balakrishnan V. Robust Kalman filters for linear time-varying systems with stochastic parametric uncertainties[J]. IEEE Trans.Signal Proc., 2002,50(4):803-813
[10] Wang F, Balakrishnan V. Robust steady state filtering for systems with deterministic and stochastic uncertainties[J]. IEEE Trans.Signal Proc., 2003,51(10):2550-2558
[11] Yang Z, Yang C, Deng Z. Guaranteed-cost robust Kalman filters for time-invariant systems with uncertain noise variances[J]. Contral Theory &Applications, 2016,33(4):446-452
[12] Liu W, Wang X, Deng Z. Robust centralized and weighted measurement fusion Kalman estimators for uncertain multisensor systems with linearly correlated white noises[J]. Information Fusion, 2017,35(3):11-25
[13] Hu CB, Ho GQ, Daniel WC,. Distributed robust fusion estimation with application to state monitoring systems[J]. IEEE Transactions on Systems Man & Cybernetics Systems, 2017,47(11):2994-3005
[14] Zhao H, Zhang H, Cui P. Steady-state optimal filtering for continuous systems with timedelay[J]. IEEE Signal Proc. Lette., 2009,6(7):628-631
[15] Zhao H, Zhang H, Zhang C,. Optimal filtering for linear discrete-time systems with signal delayed measurement[J]. Inter. Journal of Contr. Auto., 2008,6(3):378-385
[16] Lu X, Zhang H, Wang W,. Kalman filtering for multiple time-delay systems[J]. Automatica, 2005,41(8):1455-1461
[17] Sage AP, Melsa JL. Estimation theory with applications to communications and control[M]. New York: Mcgraw Hill, 1971
Optimal Filtering Wave for Uncertain Linear Time –Delay System
GUO Xiao-chun
271021,
A simple and effective optimal filtering algorithm is proposed for linear uncertain systems with time delay by using recombinant observation analysis and complete square method. First, the time-delay filtering problem is transformed into a non-time-delay problem, then the design of the filter is given by solving the Lyapunov equation and the+1 Riccati matrix equation with the same dimension as the original system, and finally, the correctness and the effectiveness of the algorithm are explained by a simulation example.
Time-delay system; Linear; filtering wave
[TP13]
A
1000-2324(2019)04-0656-05
2018-1-18
2018-6-20
郭小春(1973-),女,碩士,高級實驗師,主要研究方向為時滯系統控制. E-mail:gxc99gxc@126.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12