混合動力汽車動力耦合系統與能量控制策略研究概述
2019-09-12 02:59:26高惠東呂金賀褚亞旭
小型內燃機與車輛技術 2019年4期
徐 凱 高惠東 呂金賀 褚亞旭
(北華大學土木與交通學院 吉林 吉林 132013)
引言
隨著經濟社會的發展,推進可持續性發展是世界各國發展的首要前提。實現車輛的高動力及低能耗成為現如今汽車工業發展的大趨勢,在此趨勢下混合動力汽車(Hybrid Electric Vehicle,HEV)應運而生。
HEV目前特指內燃機(Internal Combustion Engine,ICE)和電動機(Electric Motor,EM)組合的混合驅動類型汽車,兼顧電動汽車(Electric Vehicle,EV)和內燃機汽車(Internal Combustion Engine Vehicle,ICEV)的優勢。相比于EV,既有ICEV高比能量和比功率的特性,又有超長續航里程的優勢。相比于ICEV,既有可瞬間產生峰值轉矩,又可改善ICEV的工作效率。作為ICEV與EV的中間產物,HEV已成為新能源汽車研發的焦點[1]。
1 混合動力汽車動力耦合系統分類
針對HEV的系統配置形式及工作模式,HEV的動力耦合系統可分成3種類型:機械式、電磁式及液壓式[2],3種動力耦合系統綜合對比如表1所示。
1.1 機械式動力耦合系統
現如今,HEV搭載的機械式動力耦合系統多為行星輪系結構,可簡潔高效地實現轉矩集中與分配。機械式動力耦合系統的代表為豐田THS系統,現已發展至THS-Ⅱ系統[3-4]。與THS系統的單行星輪系機構不同,其采用雙行星輪系結構,如圖1所示。ICE輸出軸連接第一排行星架,MG1連接第一排太陽輪,MG2連接第二排太陽輪,第二排行星架固定,第一排齒圈與第二排齒圈連接,第二排齒圈連接主減速器及差速器驅動半軸[5],其動力耦合系統原理[6]如圖2所示。
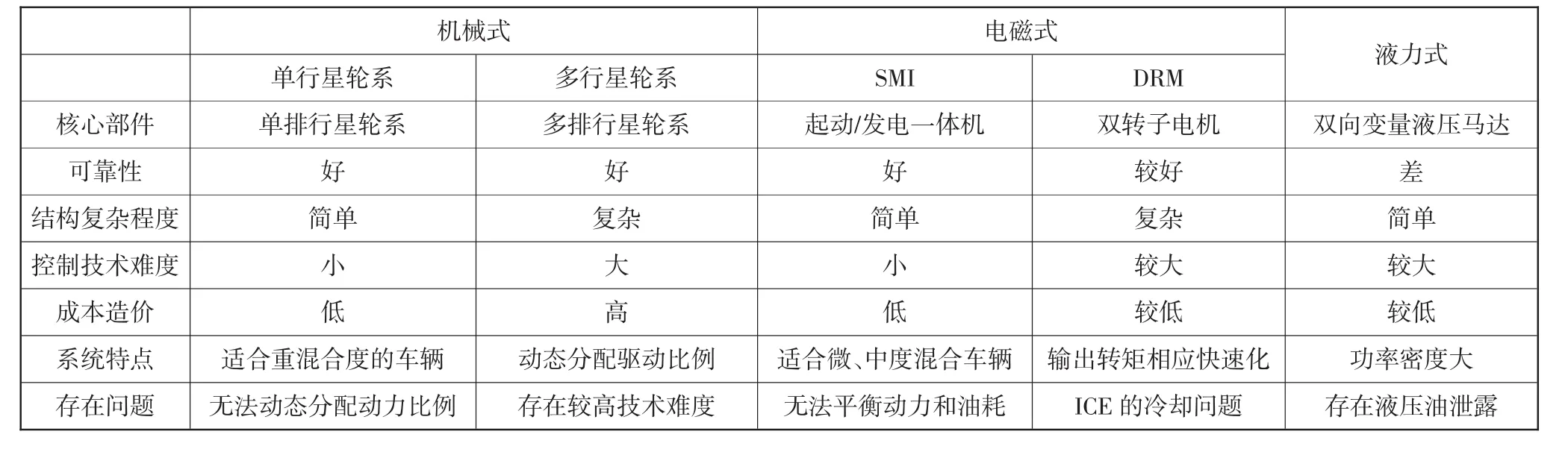
表1 動力耦合系統對比
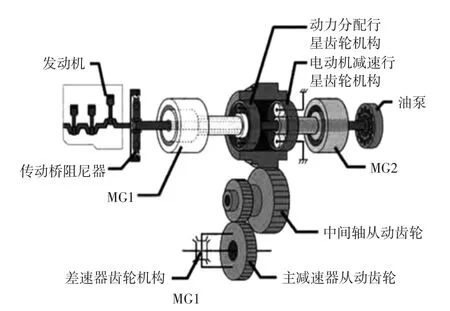
圖1 THS-Ⅱ系統機械結構示意圖

圖2 THS-Ⅱ系統動力耦合原理框圖
豐田THS-Ⅱ系統屬于深度混合的混聯式混合動力系統,其對變速器、起動機、發電機進行集成[7],可實現的功能有:
1)發動機起動時,MG1處于起動機模式帶動發動機轉速至約1 000 r/min時,火花塞點火起動發動機,可有效降低廢氣排放。
2)行星輪系傳動比的改變決定其分配比例。THS-Ⅱ系統采用多行星輪系結構可改變ICE輸出轉矩分配,ICE與電動/發電一體機輸出轉矩的分配比例為72∶28。
3)豐田THS-Ⅱ系統不是利用機械結構實現零件鎖止,而是利用IEG電動/發電一體機及ICE來改變轉矩比例,以實現傳動比的連續變化,故稱為電子無級變速器(Electronic Continuously Variable Transmission,ECVT)。
多行星輪系的機械式動力耦合系統由于內部各機構配置復雜,控制技術難度大,成本高及可靠性的原因,目前還處于發展階段。目前代表車型有豐田Camry等。
1.2 電磁式動力耦合系統
電磁式動力耦合系統通過電磁力實現輸出轉矩耦合,屬于分離式耦合形式,工作原理與電磁耦合效應相關。雙轉子電機(Double Rotor Motor,DRM)動力耦合系統為主要代表。
DRM動力耦合系統是相關領域研究的新興技術,結構如圖3所示,傳動配置結構如圖4所示。DRM為系統核心組成部分,其結構較為復雜,由內轉子、中間轉子和定子組成,內轉子和中間轉子組成內部電機,中間轉子及定子組成外部電機,從結構分析其為雙電機復合形式。最早荷蘭MartinHoeijmaker教授創新性的將DEM動力耦合結合到HEV。后期,瑞典專家設計DRM結構四象限能量轉換器(Four-Quadrant Transducer,4QT),并開發實驗機型。4QT 由2個永磁同步電機復合而成,包括一個DRM,一個定子電機[8]。其建立有限元及仿真模型,對轉矩波動、定位力矩、反電動勢等做相應論證及對比[9-10]。美國電機專家Xu L教授針對DRM研究其控制策略,開發雙機械端口電機(Dual Mechanical Port,DMP),并針對DPM研究電磁式動力耦合系統的控制策略及流程[11]。埃及學者Abdelsalam Ahmed把模糊控制引入DRM動力耦合系統的能量控制策略中。模糊規則可視為由研究人員綜合前期的實踐經驗的綜合決策[12]。在測試中發現,DRM動力耦合系統可取代行星輪系動力耦合系統[13]。
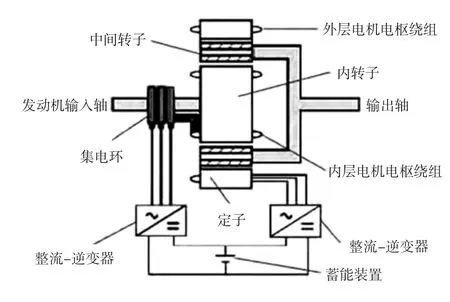
圖3 DRM內部結構示意圖

圖4 基于DRM的動力耦合系統結構示意圖
DRM動力耦合系統具有布置方便,控制靈活,造價低等特點,相較于傳統電機,DRM動力耦合系統有功率密度高效化,輸出轉矩快速化,工作效率最大化等優秀表現。特別是多端口機電轉換裝置,通過內、外電機配合工作,在HEV上可代替變速器、起動機及發電機,從而實現ECVT及其他工作模式,理論上使ICE始終處于最高效率,使車輛的燃油經濟性和排放性能更好。
1.3 液壓式動力耦合系統
液壓式動力耦合系統由雙向變量液壓馬達、高壓蓄能器、ICE等組件構成,如圖5所示。可實現ICE、液壓、HEV等驅動行駛模式。液壓油為能量傳遞介質,其基本原理是通過改變液壓油路以完成轉矩的集中和分配。

圖5 液壓式動力耦合系統結構示意圖
由于控制系統及液壓系統的技術進步,1980年后美國、德國和日本等國的汽車企業逐漸將液壓式動力耦合系統應用于實車。Ford公司和美國EPA于2004年聯合開發全球首輛全液壓HEV的SUV車型,對比同款ICEV車型,其燃油經濟性提升約55%。澳大利亞Permo-Drive公司開發一款基于液壓控制技術的液壓再生驅動系統(Hydraulic Regenerative Drive System,HRDS),其針對大型貨車及城市客車有較好應用,燃油經濟性可提升約40%。目前美國軍用車輛已進行基于HRDS的道路測試[14]。
液壓式動力耦合系統控制可靠,造價低廉,高壓蓄能裝置功率密度大,故轉換速度快且回收效率高。由于應用環境相對不成熟,在我國液壓式動力耦合系統開發較晚。
2 混合動力汽車能量控制策略
能量控制策略主要根據車輛在運行時的能量需求情況,有針對性的動態分配ICE與EM的輸出功率流,以此保證最佳的經濟性、動力性和排放性等[15]。
2.1 能量控制策略的類型
近年來在HEV發展過程中,國內外專家學者以不同方向及視角對能量控制策略進行一系列具體研究,其分類方式如圖6所示[16-18]。根據能量控制策略優化實時性,可分在、離線控制策略兩類,在線控制策略可分為基于規則型控制策略及基于最優化型控制策略。幾種能量控制策略綜合對比如表2所示。
2.2 幾種典型能量控制策略
2.2.1 模型預測能量控制策略
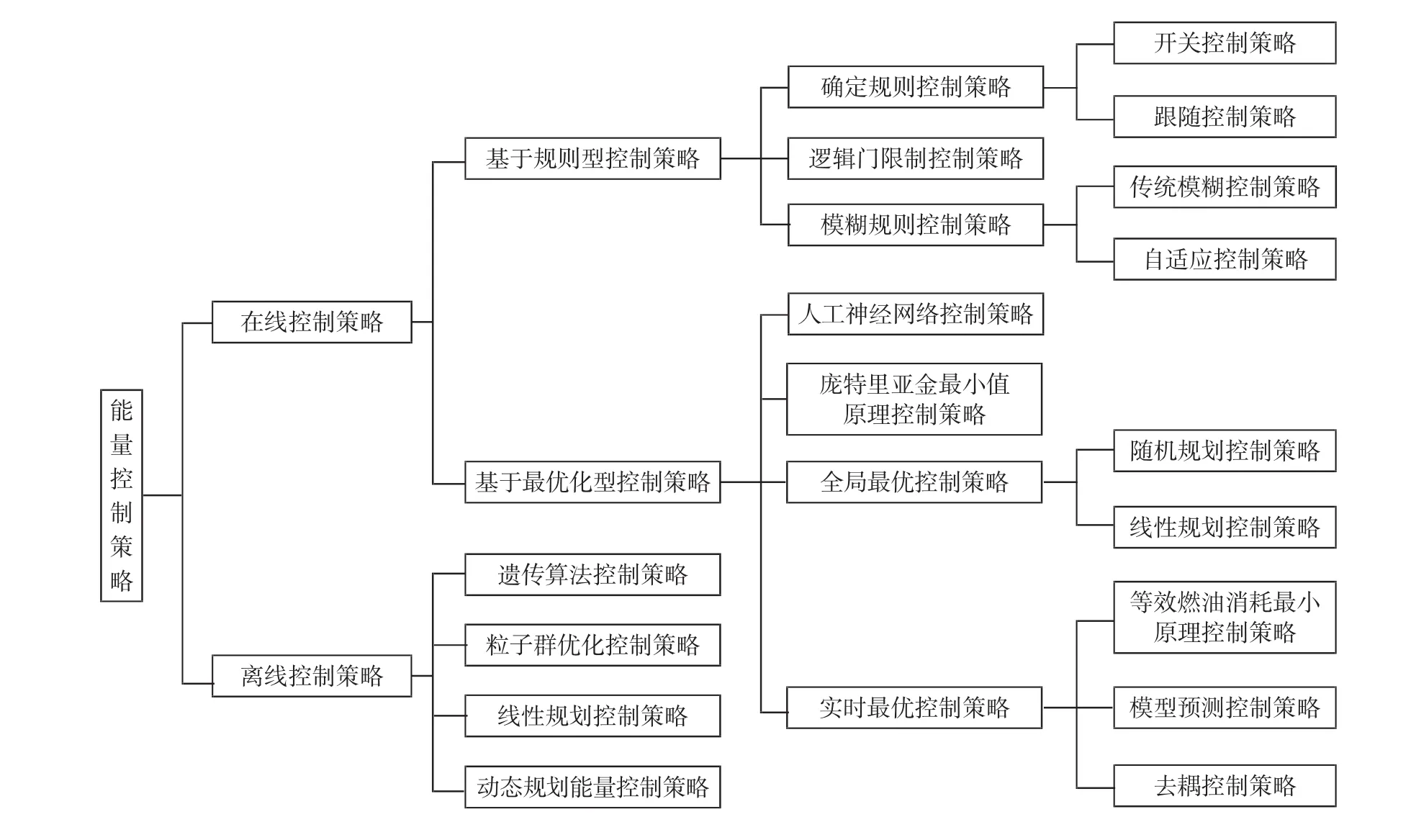
圖6 能量控制策略分類框圖
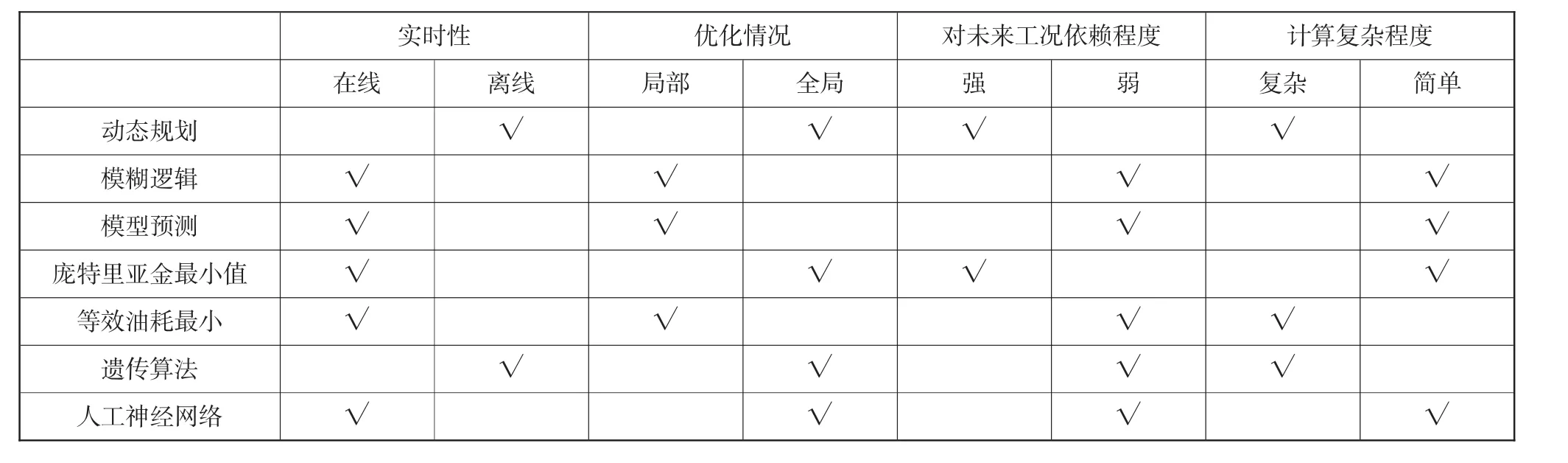
表2 幾種能量控制策略對比
模型預測能量控制(Model Predictive control,MPC)策略通過分析車輛前期運行數據、道路綜合信息及相關地域環境因素等,預測車輛在未來運行過程中階段性的功率期望,以便對能量進行合理匹配。張昕等提出一階齊次Markovprocess預測模型,對城市主要道路交通網構建車輛運行工況特征參數做相應預測[19]。Chao Sun等通過建立隨機Markovprocess預測模型,對車輛相關速度指標做相應預測[20-21]。羅禹貢等針對行車安全性、油耗經濟性和駕乘舒適性等方面提出基于非線性MPC理論的混合動力預測巡航控制算法,在巡航的安全性及經濟性存在明顯優勢[22]。SUNC等提出動力電池組荷電狀態監控及功率平衡的系統模型,制定基于實時交通信息的混合動力預測控制策略[23]。
MPC可在車輛處于運行狀態下對能量匹配實時優化,但因具有較強特殊性,控制算法存在明顯缺點。目前代表車型有豐田Prius等。
2.2.2 模糊邏輯規則能量控制策略
模糊邏輯(Fuzzy logic,FL)規則控制策略根據數理邏輯及模糊數學,通過模擬駕駛者的邏輯推導及決策判斷,可解決非線性系統控制難的問題。ZHAO D Z等提出將FL與等效燃油消耗最小控制策略進行適當結合,對其中等效因素采用模糊控制,優化深度混合動力汽車的經濟性[24]。PEIJZ等提出基于量子混沌鴿群優化算法的FL策略,同時對FL動力匹配控制系統的策略及相關隸屬度函數做相應改進,對比普通FL策略其經濟性表現更佳[25]。NCT通過使模糊邏輯算法與遺傳算法、學習矢量量化人工神經網絡進行適當結合,提出了以最小燃油消耗和動力電池組荷電狀態為雙優化目標的等效燃油消耗最小控制策略[26]。
因FL策略制定時無法脫離工程經驗,且無法保證策略最優,故將FL和其他策略結合可得到更佳效果。但其最終獲得的均為相應近似最優,且制定模糊邏輯規則表的工作量較大。
2.2.3 動態規劃能量控制策略
動態規劃能量控制策略對未來工況信息具有較大的依賴性,有著全局優化效果,且計算量較大。LarssonV,Lee H等人通過基于2~3次樣條近似動態規則算法的混合動力能量控制優化問題,使迭代計算過程有效簡化[27-28]。LEEH,CHA SW提出基于隨機動態規劃的并聯式混合動力能量控制策略,用Markovprocess反映駕駛者的實時功率需要,依據隨機動態規劃得出結果,通過優化功率分配比例,使燃油經濟性有較好表現[29-30]。QINF,LIW提出基于神經動態規劃的能量控制策略,同時對燃油經濟性和動力電池組荷電狀態進行優化,相比隨機動態規劃算法,有更佳的性能表現[31]。
動態規劃能量控制策略對未來工況數據有較強依附性及工作處于離線狀態的弊端,通過算法優化或結合其他能量控制策略,以減小計算量及實現對未來工況信息的預測。
3 總結與展望
混合動力汽車的混合驅動類型、動力耦合系統和能量管理策略直接影響著混合動力汽車的綜合性能。因此合理的系統結構匹配對混合動力汽車的開發至關重要。總體來說:
在動力耦合系統方面:DRM動力耦合系統尚存在部分問題有待解決,包括ICE的冷卻問題、車輛協同能量控制策略的進一步優化問題及DRM的升級改進問題等,都是導致DRM動力耦合系統無法大規模應用的因素。液壓式動力耦合系統同樣明顯存在問題:由于蓄能器的能量密度相對較小,故單位體積內儲存能量少,導致純液壓行駛工況下的續航里程短。由于液壓系統的結構可靠性相對較差,存在液壓油泄露的可能,故需定期進行保養維護。目前部分汽車工業發達國家對機械式動力耦合系統研究時間較長,如豐田及通用等國際車企已成功研發出基于單行星輪系、雙行星輪系及三行星輪系的機械式動力耦合系統。
現階段,基于行星輪系的機械式動力耦合系統仍為主要研究內容,尤其是基于多行星輪系。通過行星輪系的增加可以實現更多不同工作模式,更好地結合車輛的使用工況將能量輸出,盡可能使車輛始終工作在高效能區間內,更好地協調動力性與經濟性的關系。由于機械式動力耦合系統內部各機構配置復雜,控制難度較高,在我國還處于研究的初級階段,可在零部件的加工制造、新型材料的應用技術及控制策略等方面做相應技術提升。
在能量控制策略方面:HEV能量控制策略的研究對混合動力汽車的發展提供有力的技術支撐和改進方向。在今后的研究工作中,能量控制策略要在結合駕駛員的駕駛習慣、車輛行駛工況、動力電池組性能等的前提下,保證各方面綜合性指標。
總之,單一的能量控制策略均存在部分問題,因此將多種能量控制策略進行系統性判斷,取各策略優勢將不同策略進行綜合是目前能量控制策略研究的重點。綜合選擇最佳的能量控制策略,將近似全局優化、固定工況下的預測算法,依據未來運行工況信息下的動態規劃、神經網絡、大數據采集分析技術及智能交通技術等綜合結合在優化能量控制策略上具有更好前景。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26