某L型片體小水線面雙體船總體性能
2019-09-13 06:30:38陳登
船舶與海洋工程 2019年4期
關鍵詞:船舶
陳 登
(701研究所 上海凌耀船舶工程有限公司,上海 201108)
0 引 言
提高船舶的耐波性一直是船舶設計人員和其他相關研究人員關注的課題。排水量小于1000t的單體船通常難以在惡劣海況下航行,即使是排水量大于3000t的船舶,其在惡劣海況下航行時的性能也較差[1]。為提高船舶的航行性能,滿足日益增長的海上運輸需求,人們在不斷探索新的船舶設計概念,開發新船型,在此背景下提出了小水線面雙體船型。
常規的小水線面雙體船主要由水下船體、水上船體和支柱等3部分組成,其中:水下船體是完全浸沒在水中的彼此平行的魚雷狀回轉體,是浮力的主要來源;水上船體是包括上層建筑連接橋在內的所有結構;支柱穿過水面,在上體與下體之間起連接作用,橫剖面較小。小水線面雙體船具有甲板面積大、耐波性能和高航速下的靜水阻力性能好及生存能力強等特點,廣泛應用于海洋調查、客運和軍輔等領域中。但同時也存在船體結構質量大、結構工藝復雜、建造和維護成本高等缺點。目前已有多個國家擁有小水線面雙體船,比較典型的有“無暇”號、“海斯”號、“實驗1”號和“北調993”等。
1 目標船船型
目標船是一艘為海上水聲試驗提供支撐的平臺,在近海航區航行,定員100人。試驗要求該船的航速為 0~6kn,耐波性優良,甲板面積大,舷側可進行載荷收放作業。同時,能使試驗設備(質量約 50t)在船上方便地被移動。
為滿足目標船對甲板面積和耐波性的要求,考慮采用小水線面雙體船型。但是,常規小水線面雙體船對載荷變化極為敏感,建造過程復雜,無法滿足目標船對大批試驗設備上船、下船和船上移動的需求,因此常規小水線面船不能很好地適用于該項目。鑒于目標船對航速的要求并不高,考慮適當增大支柱體的水線面面積,在兼顧耐波性的同時降低對載荷變化的敏感度。同時,為適應舷側作業需求,將片體設計為L型(見圖1)。
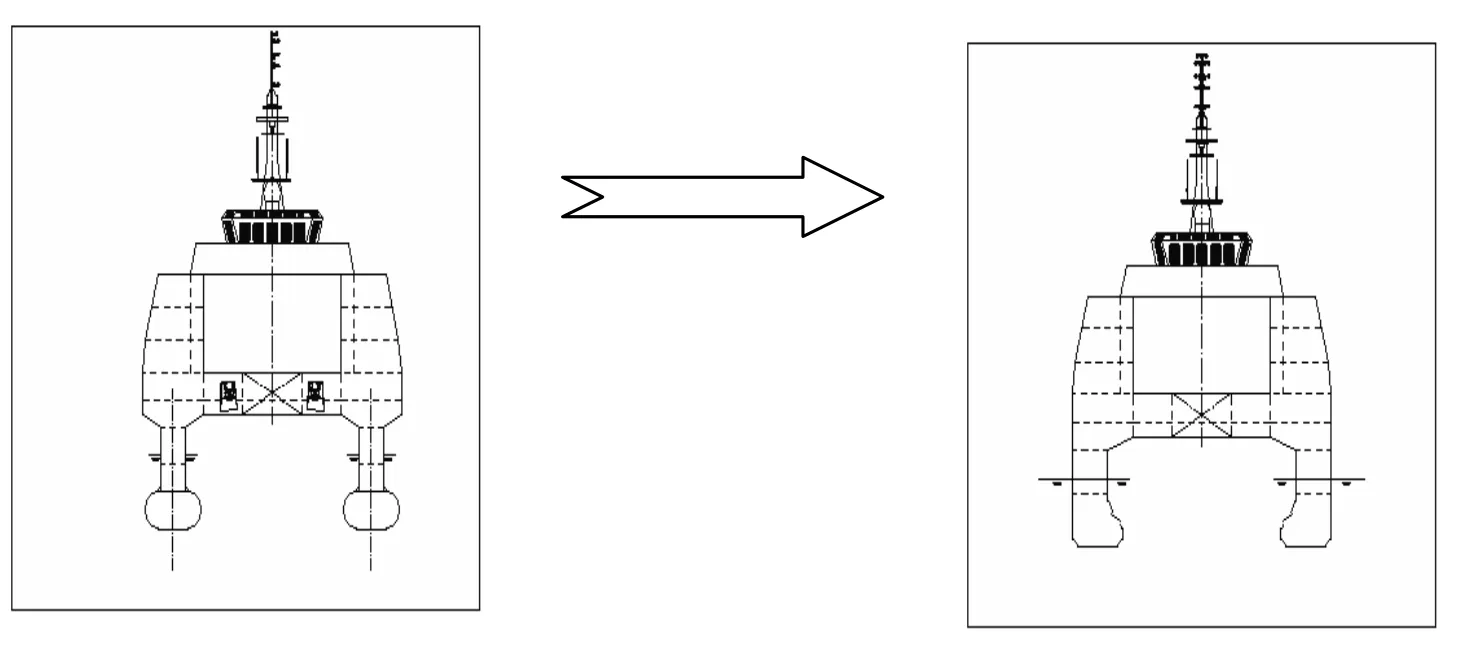
圖1 片體形狀
與常規非小水線面雙體船和單體船相比,將片體設計為L型既能減小船舶的水線面面積,保證其具有良好的耐波性,提高其適應海況的能力、出航率和作業質量,為特種試驗提供穩定的海上平臺,又能克服小水線面船載荷敏感和建造復雜的缺點,同時有利于確保結構強度和提高支柱體空間的利用率。
該船主要參數見表1。

表1 目標船主要參數
2 船舶主要性能
船舶的總體性能主要包括穩性、耐波性、快速性和操縱性。
2.1 穩性
船舶穩性是保障船舶安全需考慮的一個重要因素。穩性可分為完整穩性和破損穩性,其中:完整穩性用來校核船舶在風、浪聯合作用下抵抗傾覆的能力;破損穩性用來衡量船舶在1艙或數艙破損進水之后仍能保持一定浮性和穩性的能力,是判斷船舶遭遇海難之后能否生存的重要指標[2]。
2.1.1 完整穩性
根據《國內航行海船法定檢驗技術規則》(2012)對雙體客船的要求,對該船進行完整穩性計算,結果見表2。
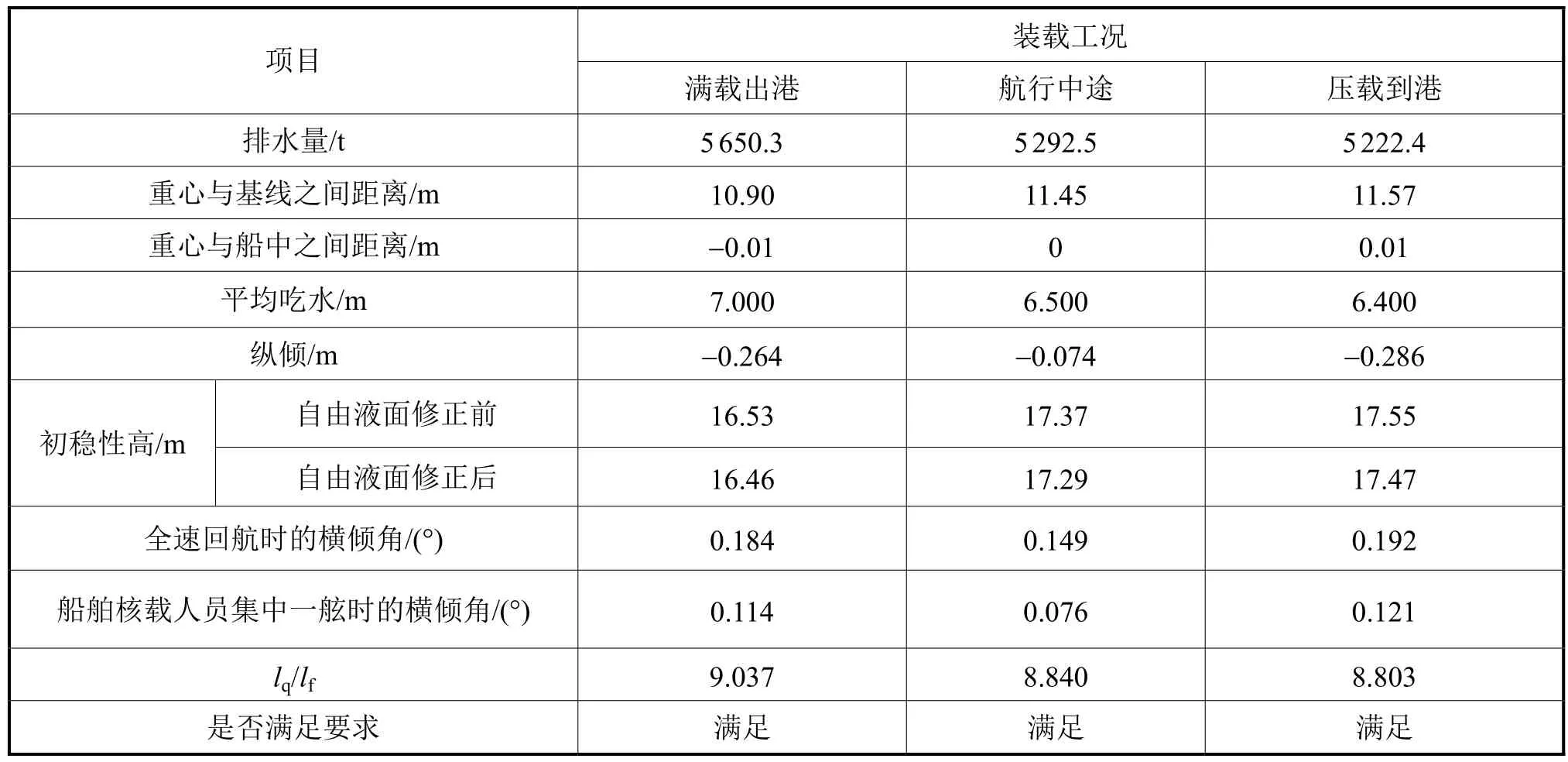
表2 目標船完整穩性計算結果
由計算結果可知,雙體船具有較大的初穩性高,抗風能力較強。
2.1.2 破損穩性
根據《國內航行海船法定檢驗技術規則》(2012)對雙體客船的要求,該船需滿足單艙不沉。采用確定性方法對該船進行破損穩性計算,得到設計狀態下的計算結果見表3。

表3 目標船破損穩性計算結果
由計算結果可知,當單片體機艙段一舷破損時,橫傾角較大。設計時,在滿足機艙布置的前提下需控制機艙段的長度。
2.2 耐波性
船舶耐波性是指:船舶在波浪擾動下發生搖蕩運動、砰擊、甲板上浪、失速、螺旋槳出水和波浪彎矩等情況時仍能在波浪中維持一定的航速安全航行的性能[3]。
2.2.1 理論計算
針對與船舶耐波性分析有關的垂蕩、橫搖和縱搖運動響應,根據Wasim數值模擬結果繪制船體在不同有義波高和不同遭遇浪向下的有義單幅值曲線,結果見圖2~圖4。
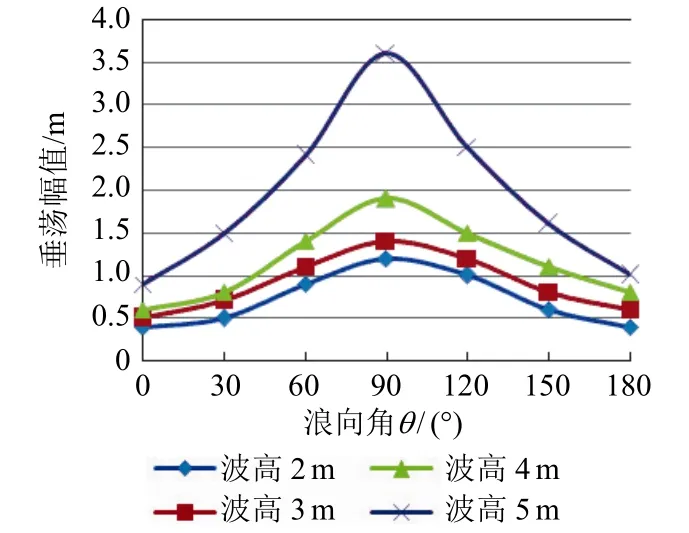
圖2 垂蕩有義單幅值曲線
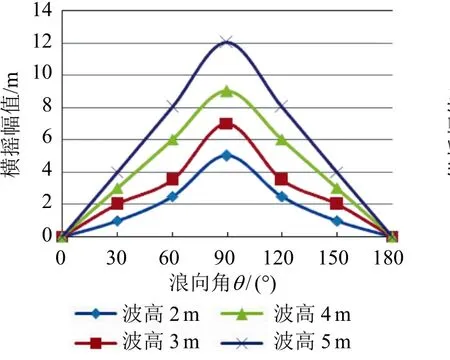
圖3 橫搖有義單幅值曲線

圖4 縱搖有義單幅值曲線
由圖2可知:垂蕩響應的有義單幅值在浪向角θ=90°時出現極值;當有義波高為2~4m時,在不同浪向下有義單幅值變化較小,最大幅值約為1.9m;當有義波高為5m時,有義單幅值變大且隨浪向變化,在浪向為90°時出現最大垂蕩有義單幅值,約為3.6m。當有義波高為5m時,波浪已砰擊到船體下部,故會引起較大垂蕩。由圖3可知:橫搖響應的最大幅值在浪向角θ=90°時出現,約為12°;最小值出現在θ=0°和θ=180°;在同一浪向下,有義波高增大則幅值增大。由圖4可知:在浪向角θ=0°~90°的浪向下,縱搖幅值逐漸變小,最小值約為0.5°;隨后縱搖幅值開始增大,縱搖有義單幅值最大約為6.5°。
2.2.2 水池試驗
在水池對該船進行耐波性試驗,包括帶航速的迎浪和隨浪試驗和無航速的橫浪和斜浪試驗。根據規則波的試驗結果,按照JONSWAP波譜進行不規則波耐波性預報,結果見圖5~圖7。
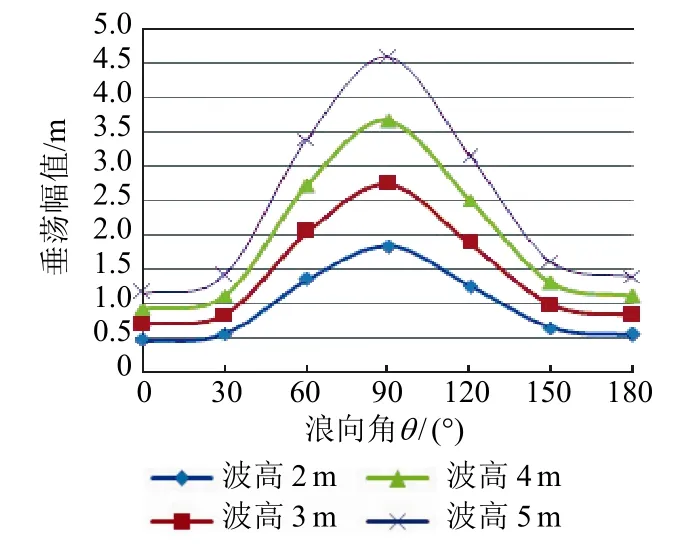
圖5 垂蕩有義單幅值曲線
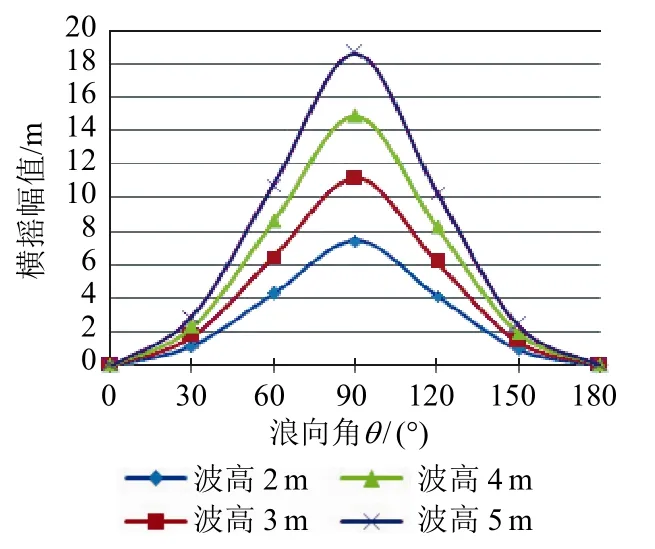
圖6 橫搖有義單幅值曲線
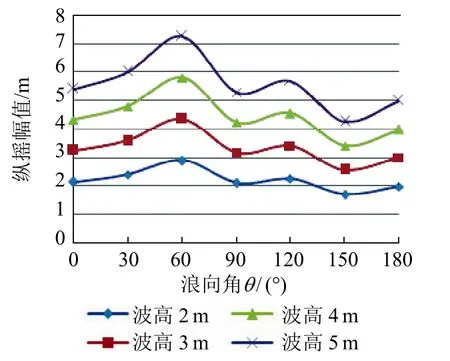
圖7 縱搖有義單幅值曲線
由圖5可知:垂蕩響應的有義單幅值在浪向角θ=90°時出現極值,在2~5m有義波高范圍內隨波高的增大,幅值不斷增大,最大幅值約為4.5m。由圖6可知:橫搖響應的最大幅值出現在浪向角θ=90°時,約為18°;最小值出現在θ=0°和θ=180°,約為0°;在同一浪向下,有義波高增大則幅值增大。由圖7可知:船舶在遭遇斜浪時,縱搖幅值較大,單幅縱搖有義值最大約為7.0°。
垂蕩和橫搖試驗結果與理論計算結果趨勢基本一致,均是在浪向角θ=90°時出現極值,但幅值不同,試驗結果比理論計算結果更大。縱搖試驗結果表明,船舶在遭遇斜浪時,縱搖幅值較大。經實船航行驗證,船舶的運動幅值與水池試驗的結果較為吻合。
2.3 快速性
復雜的雙體船型給阻力的理論估算帶來了一定的困難[4]。以水池模型試驗為手段,得到該船在設計吃水下的阻力估算結果見表4。
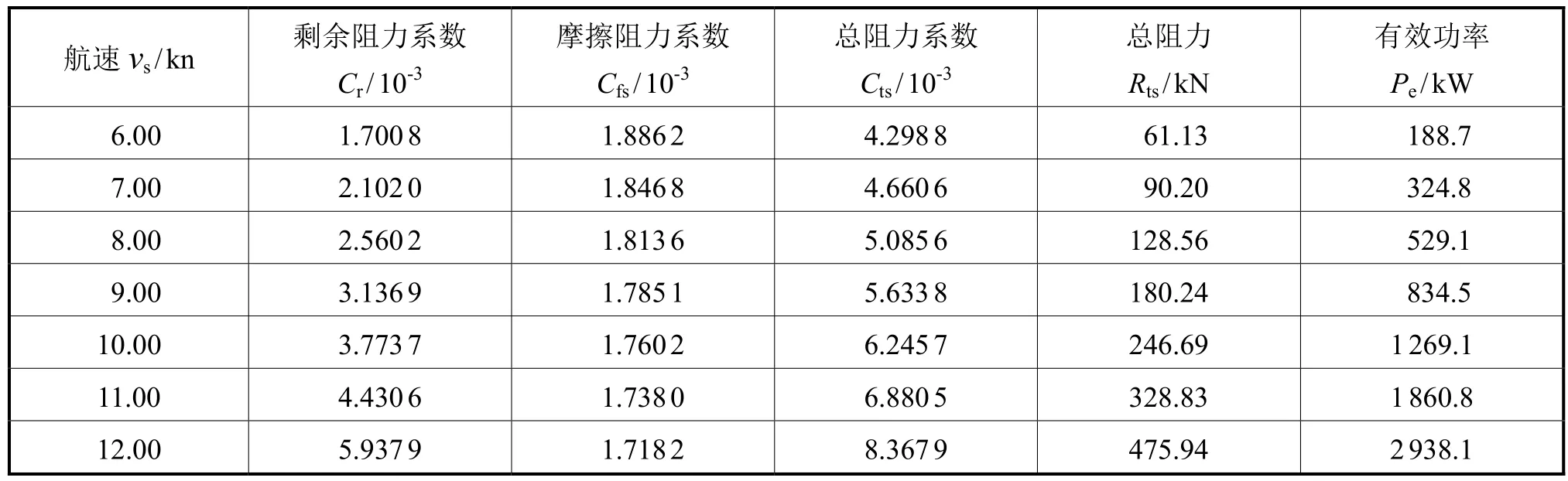
表4 目標船在設計吃水下的阻力估算結果
由表4可知,由于該船采用長平行中體,只有艏艉適當過渡的型線設計方式,因此其摩擦因數與同噸位的單體船相差不大,剩余阻力系數在高航速時遠大于常規單體船。但是,該船主要運營在0~6kn的低航速范圍區,因此其對運營經濟性的影響是有限的。
2.4 操縱性
國內外相關學者[5]已針對雙體船的操縱性開展很多研究,本文結合目標船的實船試航結果對雙體船的操縱性進行分析。雙體船的左右2個片體有利于保證其航向穩定性。船舶在直線航行時,左右2個螺旋槳可同時運轉產生推力,起到推進船舶運動的作用。船舶回轉時,2個螺旋槳與舵分別位于2個片體的尾部,且橫向間距較大,故在一定的操舵角和正車、倒車的情況下可提供大的回轉力矩和回轉角速度,使船的航向穩定性和回轉性均比較好。
該船穩定航行時,在雙機、轉速1000r/min下操舵35°的回轉試驗結果見表5。
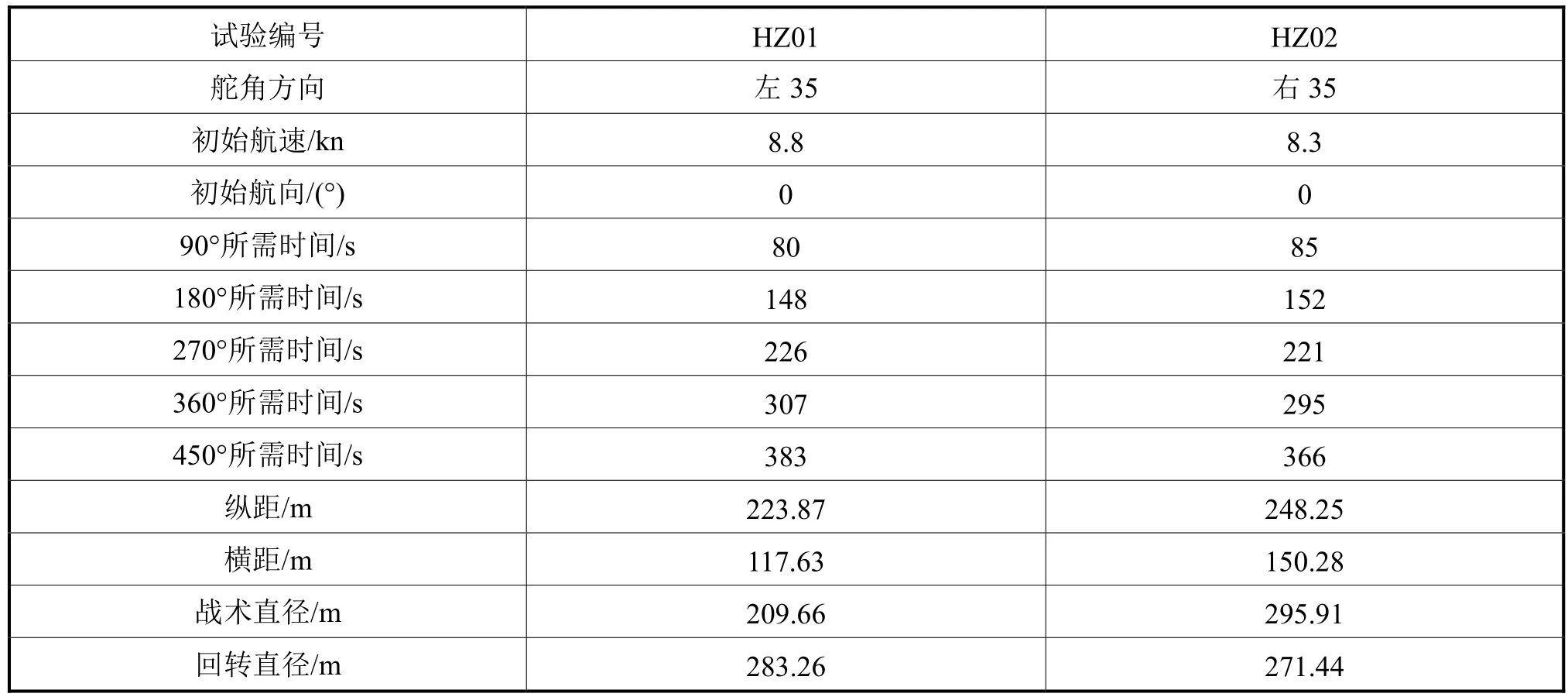
表5 目標船回轉試驗結果
該船正車航行時,保持其舵角不變,穩定3min,用差分全球定位系統(Differential Global Positioning System, DGPS)測量其在雙機、轉速1000r/min和單軸推進(左)工況下的航跡和速度變化,結果見表6。
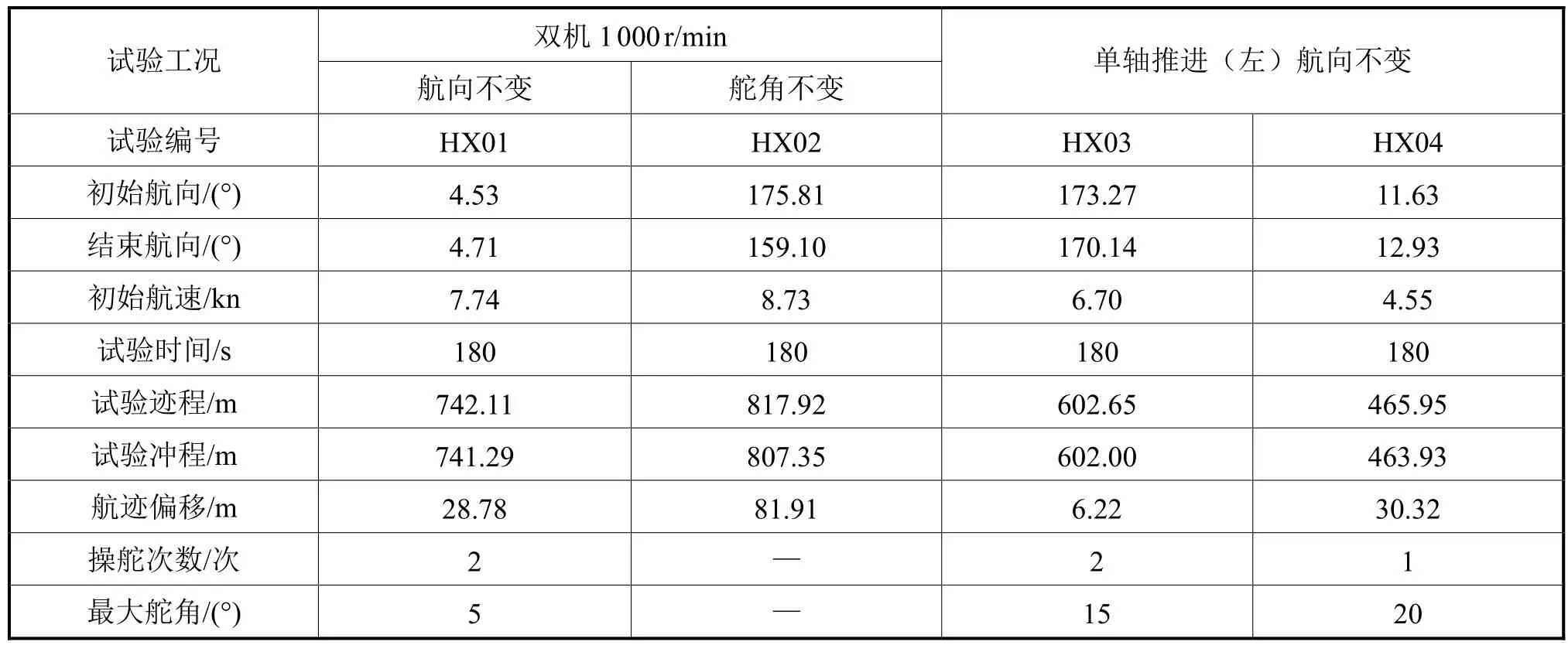
表6 目標船航向穩定性試驗結果
3 結 語
由于小水線面雙體船具有船體結構質量大、結構工藝復雜、建造及維護成本高等缺點,其發展受到了制約。目前正在營運的小水線面雙體船數量遠少于單體船,如何充分發揮小水線面雙體船的效能尚待進一步研究。本文通過一系列仿真計算和模型試驗分析,得出以下結論:
1) 通過軟件計算可知,雙體船的船寬大、初穩性高,因此完整穩性好,抗風能力強。但是,其左右不聯通,一舷破損時即會發生較大的橫傾,不利于保證其破損穩性。
2) 通過理論計算和模型試驗可知,垂蕩和橫搖的試驗結果與理論計算結果的趨勢基本一致,但幅值不同,試驗結果遠比理論計算結果大。縱搖試驗結果表明,船舶在遭遇斜浪時縱搖幅值較大。
3) 通過模型試驗可知,小水線面船的濕表面積較大,因此其摩擦阻力較大。另外,雙體船的快速性與其片體型線有很大關系,長平行中體的L型片體小水線面船的阻力性能不具有優勢。
4) 由實船試航結果可知,雙體船船長短、片體瘦長間距大,在一定的操舵角和正車、倒車情況下可提供較大的回轉力矩和較高的回轉角速度,因而其航向穩定性和回轉性都比較好。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30
