基于可穿戴式慣性傳感器的人體運(yùn)動(dòng)跟蹤方法綜述
2019-09-15 23:58:14張鋆豪何百岳楊旭升張文安
自動(dòng)化學(xué)報(bào) 2019年8期
張鋆豪 何百岳 楊旭升 張文安
人體運(yùn)動(dòng)跟蹤是一種利用傳感器來(lái)測(cè)量人體在三維空間運(yùn)動(dòng)時(shí)運(yùn)動(dòng)參數(shù)的技術(shù),早在第二次世界大戰(zhàn)之后,斯坦福大學(xué)就提出了人體運(yùn)動(dòng)捕捉這一概念,當(dāng)時(shí)主要用在醫(yī)療康復(fù)領(lǐng)域,用于對(duì)傷殘、截肢病人的運(yùn)動(dòng)分析和治療.近年來(lái),人體運(yùn)動(dòng)跟蹤技術(shù)的發(fā)展促使該技術(shù)廣泛應(yīng)用于醫(yī)療、體育、人機(jī)交互、虛擬現(xiàn)實(shí)和影視制作等領(lǐng)域.
常見(jiàn)的人體運(yùn)動(dòng)跟蹤系統(tǒng)主要有機(jī)械式的、光學(xué)式的、聲學(xué)式的和電磁式的,這些人體運(yùn)動(dòng)跟蹤技術(shù)已漸漸不能滿(mǎn)足目前人體運(yùn)動(dòng)跟蹤系統(tǒng)的要求,其中機(jī)械式的人體運(yùn)動(dòng)跟蹤系統(tǒng)容易使人體運(yùn)動(dòng)受限,基于光學(xué)的人體運(yùn)動(dòng)跟蹤系統(tǒng)較為昂貴、對(duì)光照環(huán)境要求高、易受遮擋,基于聲學(xué)的人體運(yùn)動(dòng)跟蹤系統(tǒng)實(shí)時(shí)性比較差、易受干擾,基于電磁的人體運(yùn)動(dòng)跟蹤系統(tǒng)易受磁場(chǎng)干擾,場(chǎng)地周?chē)慕饘傥锲窌?huì)造成磁場(chǎng)畸變,嚴(yán)重影響精度.人體運(yùn)動(dòng)跟蹤技術(shù)中最大的挑戰(zhàn)是使用非介入式的傳感器和在不受限的環(huán)境中準(zhǔn)確估計(jì)人體的運(yùn)動(dòng)姿態(tài).隨著微機(jī)電系統(tǒng)(Micro-electro-mechanical system,MEMS)技術(shù)的發(fā)展,基于可穿戴式慣性傳感器的人體運(yùn)動(dòng)跟蹤技術(shù)逐漸受到人們的關(guān)注,慣性式人體運(yùn)動(dòng)跟蹤系統(tǒng)具有佩戴方便、運(yùn)動(dòng)空間不受限和成本低等優(yōu)點(diǎn).
上世紀(jì)90 年代末,國(guó)外的Luinge 等[1]、Bachmann 等[2?3]和Yun 等[4]已開(kāi)展了對(duì)基于可穿戴式慣性傳感器的人體運(yùn)動(dòng)跟蹤技術(shù)的研究,EI-Gohary 等[5]首次將上肢五自由度運(yùn)動(dòng)學(xué)模型引入到上肢關(guān)節(jié)角度估計(jì)中.在商業(yè)領(lǐng)域,目前主要有美國(guó)的Innalabs、荷蘭的Xsens 等幾家公司在出售基于慣性傳感器的人體運(yùn)動(dòng)捕捉系統(tǒng).國(guó)內(nèi)的相關(guān)研究起步較晚,目前主要有中國(guó)科學(xué)院自動(dòng)化研究所吳健康等[6?10]、浙江大學(xué)金李啟雷等[11?13]、哈爾濱工程大學(xué)王科俊等[14?16]和大連理工大學(xué)王哲龍等[17?19].吳健康等[6?10]研制的MMocap 動(dòng)作捕捉系統(tǒng),由16 個(gè)慣性傳感器(包括加速度計(jì)、陀螺儀、磁力計(jì))節(jié)點(diǎn)和一個(gè)主控原件組成,數(shù)據(jù)通過(guò)藍(lán)牙裝置傳到計(jì)算機(jī)中,是國(guó)內(nèi)第一個(gè)實(shí)現(xiàn)商業(yè)化的慣性運(yùn)動(dòng)捕捉系統(tǒng).目前國(guó)內(nèi)開(kāi)發(fā)慣性動(dòng)捕系統(tǒng)比較成功的是北京諾亦騰科技有限公司,戴若犁帶領(lǐng)的團(tuán)隊(duì)成功研發(fā)了以Noitom 為品牌的全身動(dòng)作捕捉系統(tǒng).
隨著對(duì)基于可穿戴式慣性傳感器的人體運(yùn)動(dòng)跟蹤研究的深入,大量的成果不斷涌現(xiàn),眾多學(xué)者逐漸展開(kāi)了對(duì)慣性式人體運(yùn)動(dòng)跟蹤的綜述工作,對(duì)該領(lǐng)域進(jìn)行歸納與總結(jié).在已有的綜述文獻(xiàn)中,部分只是面向具體應(yīng)用進(jìn)行展開(kāi),例如文獻(xiàn)[20]介紹了穿戴式慣性傳感器在步態(tài)分析、跌倒檢測(cè)和睡眠質(zhì)量監(jiān)測(cè)方面的應(yīng)用,文獻(xiàn)[21?22]介紹了人的室內(nèi)慣性定位系統(tǒng),文獻(xiàn)[23]對(duì)基于慣性傳感器的行人步行速度估計(jì)展開(kāi)了綜述,文獻(xiàn)[24]綜述了穿戴式慣性傳感器在體育訓(xùn)練領(lǐng)域的一些應(yīng)用.當(dāng)然,也有一些學(xué)者對(duì)慣性式人體運(yùn)動(dòng)跟蹤技術(shù)進(jìn)行了較為全面的闡述、分析與整理.文獻(xiàn)[25]著眼于基于慣性傳感器的上肢運(yùn)動(dòng)跟蹤,從方法和應(yīng)用兩個(gè)方面進(jìn)行了詳細(xì)的綜述,文獻(xiàn)[26]從穿戴式體感網(wǎng)技術(shù)和數(shù)據(jù)融合方法兩個(gè)角度出發(fā)討論了如何提高基于慣性傳感器的人體位姿估計(jì)精度,文獻(xiàn)[27]對(duì)慣性式人體運(yùn)動(dòng)跟蹤技術(shù)進(jìn)行了綜述.調(diào)研發(fā)現(xiàn),現(xiàn)有的綜述文章對(duì)文獻(xiàn)的闡述還不夠全面,對(duì)傳感器初始對(duì)準(zhǔn)、模型不確定性、傳感器誤差等關(guān)鍵問(wèn)題也缺乏完整的梳理,且目前國(guó)內(nèi)未見(jiàn)有文獻(xiàn)評(píng)述這方面的研究進(jìn)展,
基于慣性傳感器的人體運(yùn)動(dòng)跟蹤系統(tǒng)如圖1 所示,為了較為全面地闡述和整理相關(guān)文獻(xiàn),本文重點(diǎn)從以下幾點(diǎn)展開(kāi)綜述:1)歸納當(dāng)前人體運(yùn)動(dòng)學(xué)模型和生物學(xué)約束;2)強(qiáng)調(diào)傳感器初始對(duì)準(zhǔn)的重要性,并對(duì)傳感器初始對(duì)準(zhǔn)方法進(jìn)行總結(jié);3)對(duì)傳感器誤差處理和數(shù)據(jù)融合方法進(jìn)行詳細(xì)整理;4)概述相關(guān)方法應(yīng)用于實(shí)際的現(xiàn)狀.最后,總結(jié)當(dāng)前研究及應(yīng)用中存在的亟待突破的關(guān)鍵問(wèn)題,為后續(xù)研究提供借鑒.
1 人體運(yùn)動(dòng)學(xué)建模及約束
人體模型是對(duì)人體進(jìn)行抽象處理得到的一種對(duì)人體形態(tài)的近似描述,基于慣性傳感器的人體運(yùn)動(dòng)跟蹤系統(tǒng),利用傳感器采集的人體動(dòng)作數(shù)據(jù),對(duì)建立的人體運(yùn)動(dòng)學(xué)模型進(jìn)行驅(qū)動(dòng),從而可對(duì)人體運(yùn)動(dòng)姿態(tài)進(jìn)行近似跟蹤,因此,建立一個(gè)符合人體行為特征的三維人體模型,以及選用合適的運(yùn)動(dòng)學(xué)表示方法,對(duì)于形象逼真地跟蹤人體運(yùn)動(dòng)顯得尤為重要.本節(jié)首先描述肢體運(yùn)動(dòng)的運(yùn)動(dòng)學(xué)表示方法,然后介紹常用的人體運(yùn)動(dòng)學(xué)模型,最后說(shuō)明人體的生物學(xué)約束.
1.1 運(yùn)動(dòng)學(xué)表示方法
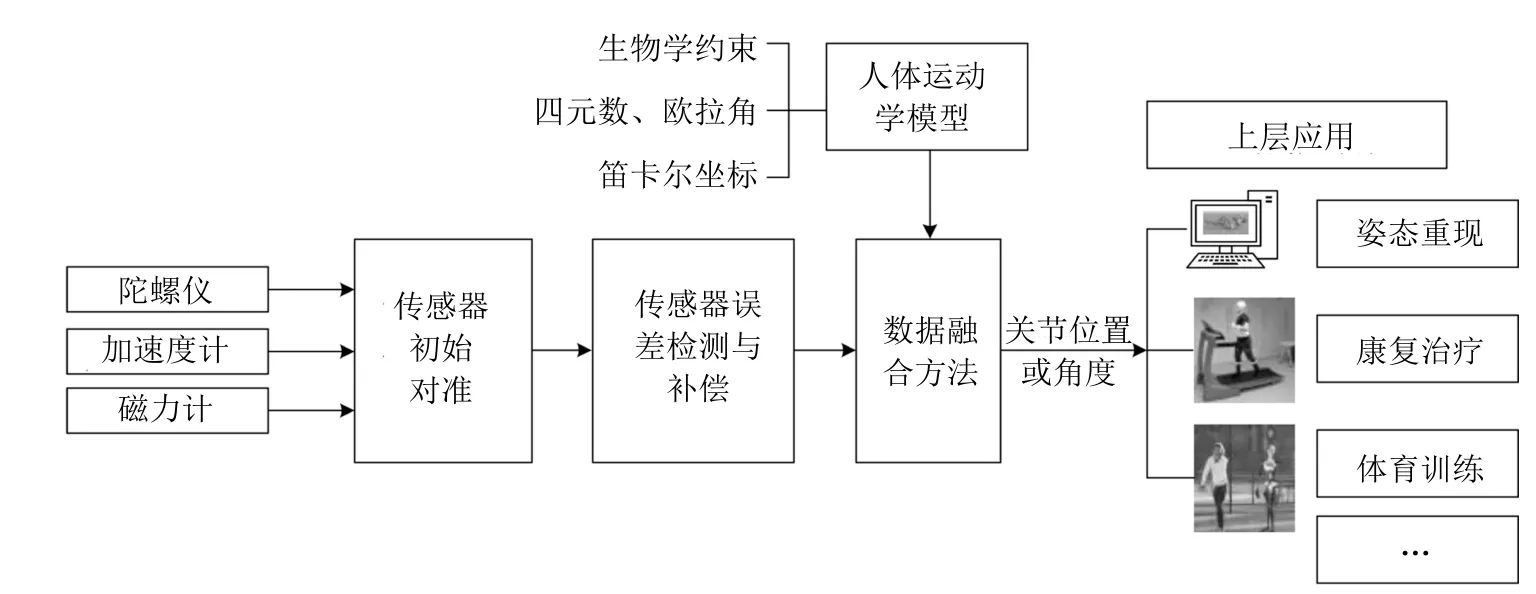
圖1 基于慣性傳感器的人體運(yùn)動(dòng)跟蹤系統(tǒng)示意圖Fig.1 Diagram of human motion tracking system based on inertial sensors
為了便于研究人體的運(yùn)動(dòng),大部分關(guān)于人體運(yùn)動(dòng)跟蹤的文章將人體簡(jiǎn)化為多剛體系統(tǒng).人體運(yùn)動(dòng)姿態(tài)在三維空間上存在6 個(gè)自由度,包括各個(gè)肢體部位的位置和方向.在基于慣性傳感器的人體運(yùn)動(dòng)跟蹤中,通常會(huì)定義三種坐標(biāo)系:傳感器坐標(biāo)系,肢體坐標(biāo)系和參考坐標(biāo)系.人體運(yùn)動(dòng)跟蹤的目標(biāo)是獲得肢體坐標(biāo)系相對(duì)于參考坐標(biāo)系的位姿.姿態(tài)描述的方法有很多,其中包括歐拉角、四元數(shù)等.歐拉角能夠形象地描述人體關(guān)節(jié)運(yùn)動(dòng),因此被廣泛用于人體姿態(tài)估計(jì)中.歐拉角是用來(lái)確定定點(diǎn)轉(zhuǎn)動(dòng)剛體位置的一組獨(dú)立的角參量,歐拉角使用偏航角,俯仰角和翻滾角來(lái)描述剛體繞各坐標(biāo)軸的旋轉(zhuǎn)角度.特別地,在人體姿態(tài)估計(jì)中,人體可以分為矢狀面、冠狀面和橫斷面三個(gè)基本平面.矢狀面沿著身體的前后方向?qū)ΨQ(chēng)地把身體分為左右兩部分,俯仰角定義為姿態(tài)在矢狀面內(nèi)的變化角度;冠狀面是指沿身體左右徑所作的縱切面,翻滾角定義為姿態(tài)在冠狀面內(nèi)的變化角度;橫斷面是指與大地平行的身體橫切面,偏航角定義為姿態(tài)在橫斷面的變化角度.然而,在使用歐拉角描述旋轉(zhuǎn)運(yùn)動(dòng)時(shí),會(huì)存在萬(wàn)向節(jié)死鎖的問(wèn)題[28],可使用四元數(shù)代替歐拉角,四元數(shù)表示方法可提高算法的可靠性,避免出現(xiàn)萬(wàn)向節(jié)死鎖問(wèn)題[2,29?31],在需要建立連續(xù)的運(yùn)動(dòng)軌跡時(shí),四元數(shù)方法更容易進(jìn)行插值[8].文獻(xiàn)[32?33]對(duì)四元數(shù)法進(jìn)行改進(jìn),使用了參數(shù)四元數(shù)法,將四元數(shù)分解在更方便計(jì)算人體生物學(xué)約束的實(shí)際關(guān)節(jié)軸上.除了四元數(shù)法之外,雙歐法[34?36]通過(guò)建立正反兩個(gè)歐拉方程來(lái)描述剛體旋轉(zhuǎn),利用正、反歐拉角解算精華區(qū)和奇異點(diǎn)的倒掛關(guān)系,在二者解算的精華區(qū)進(jìn)行交替計(jì)算,將精華區(qū)覆蓋了姿態(tài)角全域,能夠消除單一歐拉角方法的奇異性問(wèn)題.
1.2 人體運(yùn)動(dòng)學(xué)模型
在對(duì)人體姿態(tài)進(jìn)行跟蹤時(shí),通常需要建立相應(yīng)的三維連接關(guān)系來(lái)輔助跟蹤,本文按照文獻(xiàn)對(duì)關(guān)節(jié)連接方式的不同,將描述人體運(yùn)動(dòng)學(xué)的模型分成三類(lèi).第一類(lèi)方法對(duì)關(guān)節(jié)連接不作限制,獨(dú)立估計(jì)各個(gè)部位的姿態(tài).此類(lèi)方法假設(shè)傳感器擁有很高的精度,能夠單獨(dú)估計(jì)每個(gè)身體部位的姿態(tài)[37?38].文獻(xiàn)[39]使用這類(lèi)方法分別估計(jì)出各個(gè)部位的位姿,再引入生理學(xué)約束防止姿態(tài)的估計(jì)值超出人體實(shí)際的運(yùn)動(dòng)范圍.
第二類(lèi)方法認(rèn)為關(guān)節(jié)是緊耦合的,即人體的運(yùn)動(dòng)鏈模型[8],如圖2(a)所示.該模型把人體各肢體部位假設(shè)成用鉸鏈連接的剛體,每相鄰兩個(gè)部位之間的自由度根據(jù)人體關(guān)節(jié)的旋轉(zhuǎn)自由度而定,例如肘部關(guān)節(jié)為一個(gè)2 自由度的鉸鏈關(guān)節(jié),肩關(guān)節(jié)為3自由度的球窩關(guān)節(jié)[8,40?41].
上肢由上臂、前臂和手三部分組成,可根據(jù)實(shí)際應(yīng)用場(chǎng)景的需要建成具有不同自由度的模型.其中,使用最為廣泛的是7 自由度模型,7 自由度模型分為兩類(lèi),第一類(lèi)對(duì)應(yīng)肩關(guān)節(jié)的旋內(nèi)/旋外、內(nèi)收/外展和屈/伸3 個(gè)運(yùn)動(dòng)自由度,肘關(guān)節(jié)的旋內(nèi)/旋外和屈/伸兩個(gè)自由度,以及腕關(guān)節(jié)的內(nèi)收/外展和屈/伸2 個(gè)自由度[42?44].第二類(lèi)除了考慮肩關(guān)節(jié)的3 個(gè)自由度和肘關(guān)節(jié)的2 個(gè)自由度外,還考慮了肩胛骨相對(duì)運(yùn)動(dòng)的2 個(gè)自由度,分別通過(guò)放置在肩膀、上臂和前臂上的3 個(gè)傳感器來(lái)測(cè)量這3 個(gè)關(guān)節(jié)的運(yùn)動(dòng)[45].另外,根據(jù)實(shí)際應(yīng)用場(chǎng)合的需要,一些文獻(xiàn)采用了5 自由度和4 自由度的人體上肢模型.5 自由度模型一般在第一類(lèi)7 自由度模型的基礎(chǔ)上省略了腕關(guān)節(jié)的2個(gè)自由度,只考慮上臂和前臂的運(yùn)動(dòng),因其結(jié)構(gòu)簡(jiǎn)單又不失一般性,因而被很多學(xué)者采用[5?6].Ruffaldi等[46]將概論圖模型引入上肢5 自由度模型中.在一些特殊的應(yīng)用場(chǎng)合,文獻(xiàn)[47]針對(duì)中風(fēng)病人的康復(fù)治療,只考慮患者肩關(guān)節(jié)3 個(gè)自由度的運(yùn)動(dòng)和肘部的屈/伸運(yùn)動(dòng),因此使用4 自由度模型即可.文獻(xiàn)[48]研究了上臂和軀干的相對(duì)運(yùn)動(dòng),簡(jiǎn)單的4 自由度模型就能滿(mǎn)足要求.若進(jìn)一步考慮上肢關(guān)節(jié)的復(fù)雜運(yùn)動(dòng),還可以采用具有更多自由度的模型,華中科技大學(xué)陳文斌[49]通過(guò)從上肢肩關(guān)節(jié)復(fù)合體和肘關(guān)節(jié)復(fù)合體中抽取出等價(jià)運(yùn)動(dòng)鏈,建立了具有4 個(gè)關(guān)節(jié)和11 個(gè)自由度的人體上肢運(yùn)動(dòng)鏈模型,11 個(gè)自由度為胸鎖關(guān)節(jié)內(nèi)收/外展、抬起/下落和軸向轉(zhuǎn)動(dòng)3 個(gè)自由度,肩鎖關(guān)節(jié)內(nèi)收/外展、側(cè)旋/回旋和前傾/后傾3 個(gè)自由度,盂肱關(guān)節(jié)內(nèi)旋/外旋、外展/內(nèi)收和前屈/后伸3 個(gè)自由度,肘關(guān)節(jié)屈/伸和旋前/旋后2 個(gè)自由度.

圖2 運(yùn)動(dòng)鏈模型和自由部位模型示意圖Fig.2 Diagram of kinematic chain model and free segments model
人體的下肢由大腿、小腿和腳三個(gè)部位構(gòu)成,大腿通過(guò)髖關(guān)節(jié)和骨盆相連.文獻(xiàn)[50]建立的下肢模型以運(yùn)動(dòng)鏈模型的形式將各個(gè)部位連接起來(lái),它含有髖關(guān)節(jié),膝關(guān)節(jié),踝關(guān)節(jié),腳趾共4 個(gè)球關(guān)節(jié),有12 個(gè)自由度.Joukov 等[51],使用了簡(jiǎn)化后的4 自由度下肢模型,其中髖關(guān)節(jié)是存在3 個(gè)自由度的球窩關(guān)節(jié),另外,它根據(jù)生物學(xué)約束,膝關(guān)節(jié)僅保留彎曲/伸展自由度.基于運(yùn)動(dòng)鏈的下肢模型常用于人的步行軌跡跟蹤.文獻(xiàn)[52]直接對(duì)步行速度積分到步長(zhǎng),最后還原行走軌跡.文獻(xiàn)[53]還進(jìn)一步檢測(cè)出步行方向和每一步的時(shí)長(zhǎng),提高了跟蹤的準(zhǔn)確率.文獻(xiàn)[54]為了解決室內(nèi)磁干擾較強(qiáng)的情況,通過(guò)UWB和運(yùn)動(dòng)鏈模型共同確定航向角,該方法能夠保證系統(tǒng)有較強(qiáng)的魯棒性,甚至能夠適應(yīng)跑步和跳躍的場(chǎng)景.文獻(xiàn)[17]還通過(guò)運(yùn)動(dòng)鏈模型和零速度更新算法結(jié)合,提高了行走軌跡的跟蹤精度.在醫(yī)療康復(fù)領(lǐng)域,Cutti 等[55]提出的outwalk 協(xié)議可用于對(duì)腦癱小孩和截肢患者的步態(tài)分析.
全身的人體模型一般建成樹(shù)狀結(jié)構(gòu),如圖3 所示身體部位的移動(dòng)可以看成是子節(jié)點(diǎn)相對(duì)于父節(jié)點(diǎn)的運(yùn)動(dòng),父節(jié)點(diǎn)的姿態(tài)信息能夠通過(guò)運(yùn)動(dòng)鏈模型傳遞給它的子節(jié)點(diǎn).文獻(xiàn)[8,56?58]采用的方法都是選擇某一關(guān)節(jié)作為全身運(yùn)動(dòng)的根節(jié)點(diǎn),從根節(jié)點(diǎn)遞推計(jì)算出每個(gè)子節(jié)點(diǎn)的位姿信息.其中,文獻(xiàn)[8]定義連接髖骨和胸腔骨骼的連接點(diǎn)作為整個(gè)人體樹(shù)狀結(jié)構(gòu)的根節(jié)點(diǎn),文獻(xiàn)[56]提出用優(yōu)化的方法重建模型,選取骨盆作為根節(jié)點(diǎn)進(jìn)行全身姿態(tài)重建,結(jié)果表明,選取骨盆做根節(jié)點(diǎn)時(shí)計(jì)算效率較高.
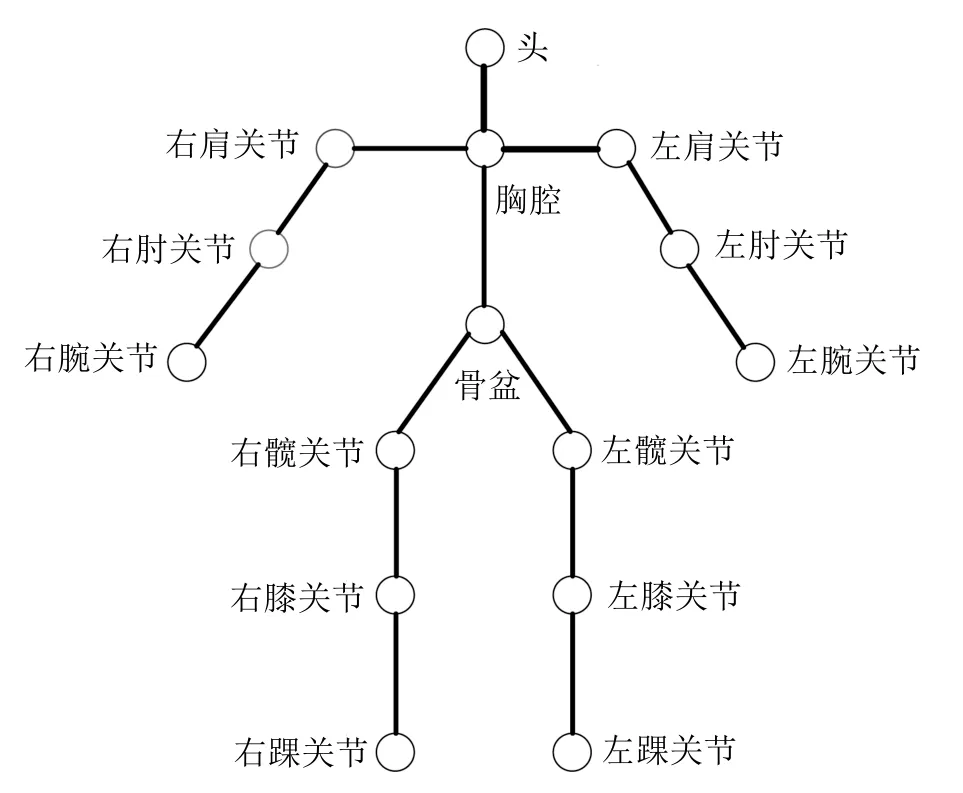
圖3 人體樹(shù)狀結(jié)構(gòu)圖Fig.3 Diagram of human tree structure model
與人體實(shí)際結(jié)構(gòu)相比,運(yùn)動(dòng)鏈模型也存在一些不足,在實(shí)際情況中有些關(guān)節(jié)并不是完美的鉸接關(guān)節(jié),每個(gè)關(guān)節(jié)在運(yùn)動(dòng)時(shí)會(huì)產(chǎn)生一些相對(duì)的位移,因此一些文獻(xiàn)提出了自由部位模型[59?60],如圖2(b)所示.以肘關(guān)節(jié)為例,當(dāng)尺骨相對(duì)于肱骨移動(dòng)時(shí),其軸線不固定[61],建立肘部模型時(shí),難以準(zhǔn)確定位旋轉(zhuǎn)軸的真實(shí)方向[62],因此肘關(guān)節(jié)并不是一個(gè)完美的鉸鏈關(guān)節(jié),選用自由部位模型進(jìn)行建模更為合適.
1.3 人體生物學(xué)約束
運(yùn)動(dòng)鏈模型是人體運(yùn)動(dòng)跟蹤中最常用的模型,它通過(guò)關(guān)節(jié)將身體相鄰部位緊密連接,每個(gè)關(guān)節(jié)最多可以擁有3 個(gè)自由度.但是對(duì)于手肘和膝蓋等關(guān)節(jié),在某些軸上的運(yùn)動(dòng)自由度存在限制,在進(jìn)行人體姿態(tài)估計(jì)時(shí)應(yīng)該考慮這類(lèi)關(guān)節(jié)約束.對(duì)于這一類(lèi)問(wèn)題,國(guó)內(nèi)外學(xué)者進(jìn)行了一系列研究.對(duì)上肢關(guān)節(jié)自由度約束的研究主要集中于肘部,Zhang 等[7,63]根據(jù)肘關(guān)節(jié)內(nèi)收/外展的范圍極小這一事實(shí)提出了分層濾波算法,在第二層中通過(guò)肘關(guān)節(jié)約束建立的濾波算法提高姿態(tài)估計(jì)的精度.同樣,Luinge 等[64]在僅使用陀螺儀和加速度計(jì)的情況下,以肘部?jī)?nèi)收/外展角度為零作為約束建立優(yōu)化問(wèn)題,通過(guò)最小二乘法求解該優(yōu)化問(wèn)題來(lái)提高姿態(tài)估計(jì)的精度.EIGohary 等[5]和Zhang 等[6]在運(yùn)動(dòng)鏈模型中引入對(duì)肘關(guān)節(jié)自由度的限制,從本質(zhì)上解決了上肢運(yùn)動(dòng)估計(jì)時(shí)肘關(guān)節(jié)內(nèi)收/外展角錯(cuò)誤估計(jì)的問(wèn)題.同樣地,對(duì)下肢關(guān)節(jié)自由度約束的研究主要集中于膝關(guān)節(jié),膝關(guān)節(jié)與肘關(guān)節(jié)類(lèi)似.Cooper 等[65]僅考慮膝關(guān)節(jié)的屈/伸自由度,通過(guò)綁在大腿和小腿上的慣性傳感器有效估計(jì)膝關(guān)節(jié)角度.Meng 等[66]同樣將膝蓋約束成僅具有屈/伸自由度的關(guān)節(jié),因此表示膝關(guān)節(jié)屈/伸運(yùn)動(dòng)的四元數(shù)向量應(yīng)該與膝關(guān)節(jié)的內(nèi)收/外展關(guān)節(jié)軸和內(nèi)旋/外旋關(guān)節(jié)軸均正交,以此為約束可減小線性加速度和磁力計(jì)擾動(dòng)的影響.
除關(guān)節(jié)自由度約束外,每個(gè)關(guān)節(jié)的運(yùn)動(dòng)范圍也存在一定的限制.文獻(xiàn)[32]提到在僅使用加速度計(jì)測(cè)量肘關(guān)節(jié)角度時(shí),會(huì)存在歧義解,通過(guò)引入關(guān)節(jié)運(yùn)動(dòng)范圍的約束,可以解決姿態(tài)解算結(jié)果的模糊性問(wèn)題.另外,考慮每個(gè)關(guān)節(jié)的角度約束后,可采用帶有角度約束的數(shù)據(jù)融合方法估計(jì)人體運(yùn)動(dòng)姿態(tài),El-Gohary 等[5]將關(guān)節(jié)角度的約束作為狀態(tài)約束,采用帶有狀態(tài)約束的無(wú)跡卡爾曼濾波器(Unscented Kalman filter,UKF)估計(jì)上肢運(yùn)動(dòng)姿態(tài).文獻(xiàn)[67]總結(jié)了帶有狀態(tài)約束的卡爾曼濾波方法.
另外,一些文章還進(jìn)一步考慮了關(guān)節(jié)位置和速度等約束.文獻(xiàn)[68]為了提高上肢姿態(tài)估計(jì)的精度,引入以下約束:由上臂和下臂傳感器分別計(jì)算所得的肘關(guān)節(jié)的運(yùn)動(dòng)速度應(yīng)該相等.文獻(xiàn)[50]在估計(jì)人步行時(shí)的全局位移時(shí),為了減小累積誤差,考慮以下約束:分別由左下肢和右下肢傳感器獨(dú)立估計(jì)得到的人體位移應(yīng)該盡可能相等,基于此約束的融合方法將在第3.3.2 節(jié)具體闡述.
2 傳感器初始對(duì)準(zhǔn)
本節(jié)介紹傳感器初始對(duì)準(zhǔn)方法,用于解決傳感器安裝姿態(tài)與理想姿態(tài)不一致帶來(lái)的問(wèn)題.在實(shí)際中,往往存在傳感器的敏感軸與待測(cè)部位軸向不一致的現(xiàn)象,即無(wú)法將傳感器模塊安放在理想的位置,如圖4 所示.因此無(wú)法直接得到肢體坐標(biāo)系相對(duì)于參考坐標(biāo)系的姿態(tài),而且每次測(cè)量也不能保證安裝位置的一致性.還有一種情況是使用多個(gè)傳感器進(jìn)行姿態(tài)測(cè)量時(shí),每個(gè)傳感器的基準(zhǔn)坐標(biāo)系和初始姿態(tài)都是不同的.傳感器的安放誤差以及多個(gè)傳感器之間的不對(duì)準(zhǔn)誤差都會(huì)嚴(yán)重影響到多傳感器數(shù)據(jù)融合算法的有效性,因此初始時(shí)刻必須進(jìn)行傳感器的對(duì)準(zhǔn).向量在加速度計(jì)和磁力計(jì)的各軸分量計(jì)算出初始翻滾角、俯仰角和偏航角,進(jìn)而求出初始對(duì)準(zhǔn)的坐標(biāo)系變換矩陣,然后基于參考向量修正坐標(biāo)系變換矩陣分別完成對(duì)3 個(gè)歐拉角的補(bǔ)償,得到精確的人體下肢初始姿態(tài)信息.
動(dòng)態(tài)對(duì)準(zhǔn)方法要求被測(cè)試者完成一種或一組動(dòng)態(tài)動(dòng)作,例如關(guān)節(jié)的內(nèi)收/外展、關(guān)節(jié)內(nèi)旋/外旋和屈/伸等動(dòng)作.Luinge 等[64]設(shè)計(jì)了2 種動(dòng)作,用來(lái)完成前臂和上臂傳感器的初始對(duì)準(zhǔn).對(duì)準(zhǔn)前臂傳感器時(shí),需讓上臂保持垂直,前臂抬起,繞橈骨左右各旋轉(zhuǎn)180?;對(duì)準(zhǔn)上臂傳感器時(shí),第1 步將肘部放在水平桌面上繞肱骨做旋轉(zhuǎn)運(yùn)動(dòng),第2 步將前臂抬起至水平,保持前臂不動(dòng),上臂做外展運(yùn)動(dòng),對(duì)準(zhǔn)過(guò)程中用到了陀螺儀和加速度計(jì).在文獻(xiàn)[64]的基礎(chǔ)上,Yang 等[72]定義了4 種對(duì)準(zhǔn)動(dòng)作,并在對(duì)準(zhǔn)過(guò)程中采用擴(kuò)展卡爾曼濾波器(Extended Kalman filter,EKF)消除動(dòng)態(tài)對(duì)準(zhǔn)動(dòng)作中線性加速度的影響.此外,文獻(xiàn)[73?76]也設(shè)計(jì)了相應(yīng)的動(dòng)態(tài)對(duì)準(zhǔn)方法.以上的幾種動(dòng)態(tài)對(duì)準(zhǔn)方法,均要求被測(cè)試者完成特定的對(duì)準(zhǔn)動(dòng)作,且這些動(dòng)作對(duì)關(guān)節(jié)的運(yùn)動(dòng)角度有要求,例如文獻(xiàn)[72]中要求前臂繞橈骨分別內(nèi)旋/外旋180?.

圖4 傳感器初始不對(duì)準(zhǔn)誤差示意圖Fig.4 Diagram of initial sensor miscalibration error
文獻(xiàn)[65]進(jìn)行傳感器初始對(duì)準(zhǔn)時(shí),通過(guò)在下肢關(guān)節(jié)處安放標(biāo)記點(diǎn),借助外部相機(jī)完成對(duì)準(zhǔn)過(guò)程,文獻(xiàn)[69]通過(guò)自行設(shè)計(jì)的測(cè)量設(shè)備完成對(duì)準(zhǔn)過(guò)程.除此之外,通常要求被測(cè)試者完成一些規(guī)定的動(dòng)作以完成傳感器的初始對(duì)準(zhǔn),分為靜態(tài)對(duì)準(zhǔn)方法和動(dòng)態(tài)對(duì)準(zhǔn)方法.
在上肢傳感器的初始對(duì)準(zhǔn)中,最常見(jiàn)的兩種靜止對(duì)準(zhǔn)姿勢(shì)是N-pose(手臂自然向下垂直于地面)[6,44]和T-pose(手臂平舉平行于地面,手掌向下)[70?71],靜止對(duì)準(zhǔn)姿勢(shì)示意圖如圖5 所示.文獻(xiàn)[6,44]在初始時(shí)刻讓被測(cè)試者保持N-pose 姿勢(shì)靜止5 s,通過(guò)采集到的加速度計(jì)和磁力計(jì)信號(hào)得到初始對(duì)準(zhǔn)的坐標(biāo)系變換矩陣.文獻(xiàn)[70]在對(duì)準(zhǔn)過(guò)程中結(jié)合了N-pose 和T-pose 兩種姿勢(shì)以更精確地得到初始對(duì)準(zhǔn)結(jié)果.在下肢傳感器初始對(duì)準(zhǔn)中,通常讓人體保持靜止站立的姿勢(shì),文獻(xiàn)[66]通過(guò)陀螺儀和加速度計(jì)的測(cè)量值完成被測(cè)試者靜止站立階段的初始對(duì)準(zhǔn).文獻(xiàn)[17?18]采用的方法是在步行開(kāi)始前的靜止站立階段,通過(guò)重力向量和地磁矢量?jī)蓚€(gè)參考

圖5 上肢靜止對(duì)準(zhǔn)動(dòng)作示意圖Fig.5 Diagram of upper limb static calibration
靜態(tài)對(duì)準(zhǔn)方法操作方便,但是對(duì)被測(cè)試者來(lái)說(shuō),要完成完全標(biāo)準(zhǔn)的N-pose 或T-pose 動(dòng)作并非易事,往往需要借助外部設(shè)備或?qū)I(yè)人士的幫助才能使手臂或下肢完全保持垂直或水平.采用動(dòng)態(tài)對(duì)準(zhǔn)方法時(shí),即使是健康的人也無(wú)法標(biāo)準(zhǔn)地完成每個(gè)動(dòng)態(tài)對(duì)準(zhǔn)動(dòng)作,對(duì)于一些失去部分行動(dòng)能力的病患尤甚.這類(lèi)傳感器對(duì)準(zhǔn)方法的精度完全依賴(lài)于被測(cè)試者完成相應(yīng)對(duì)準(zhǔn)動(dòng)作的精度,文獻(xiàn)[60]表明基于EKF 融合算法的人體姿態(tài)估計(jì)結(jié)果對(duì)初始對(duì)準(zhǔn)誤差較為敏感,若初始對(duì)準(zhǔn)時(shí)存在誤差,人體姿態(tài)估計(jì)精度會(huì)明顯下降.因此,近年來(lái)一些學(xué)者提出了同時(shí)姿態(tài)估計(jì)和在線對(duì)準(zhǔn)的方法[77]和無(wú)需對(duì)準(zhǔn)的人體姿態(tài)估計(jì)方法[78?79].文獻(xiàn)[77]將同時(shí)在線估計(jì)上肢關(guān)節(jié)角度四元數(shù)和位置以及傳感器對(duì)準(zhǔn)參數(shù)的問(wèn)題,建模成一個(gè)帶有約束的最小二乘問(wèn)題,通過(guò)滑動(dòng)窗的方法求解最優(yōu)的參數(shù).文獻(xiàn)[78]提到由于肘部只有2 個(gè)自由度,當(dāng)測(cè)量肘部彎曲角度時(shí),可將肘部的旋轉(zhuǎn)運(yùn)動(dòng)分解到這2 個(gè)旋轉(zhuǎn)主軸上,因此可避免傳感器坐標(biāo)系的初始對(duì)準(zhǔn),借助任意非正交旋轉(zhuǎn)軸的歐拉角解算方法得到肘部的彎曲角度.文獻(xiàn)[79]提出的無(wú)校準(zhǔn)方法無(wú)需佩戴者完成特定的對(duì)準(zhǔn)動(dòng)作,上肢運(yùn)動(dòng)的姿態(tài)估計(jì)結(jié)果不易受到傳感器安裝位置的影響.
3 傳感器信號(hào)處理
在完成傳感器的初始對(duì)準(zhǔn)后,需對(duì)來(lái)自各個(gè)傳感器的數(shù)據(jù)進(jìn)行處理和融合以精確地估計(jì)人體的姿態(tài).人體的運(yùn)動(dòng)跟蹤涉及陀螺儀、加速度計(jì)和磁力計(jì),陀螺儀動(dòng)態(tài)精度較好,但陀螺儀最顯著的缺點(diǎn)是容易受到隨機(jī)漂移的影響,加速度計(jì)和磁力計(jì)在靜態(tài)時(shí)測(cè)量精度較高,但加速度計(jì)在動(dòng)態(tài)運(yùn)動(dòng)中存在線性加速度的干擾,室內(nèi)環(huán)境中磁力計(jì)容易受到鐵磁擾動(dòng).因此,要想準(zhǔn)確地獲得人體位姿估計(jì)的結(jié)果,在對(duì)傳感器信號(hào)進(jìn)行處理時(shí),必須解決兩個(gè)關(guān)鍵問(wèn)題:1)對(duì)傳感器的誤差進(jìn)行補(bǔ)償和校正;2)采用合適的算法融合各傳感器數(shù)據(jù).
3.1 傳感器種類(lèi)
在處理傳感器誤差和采用融合算法之前,必須了解各類(lèi)傳感器的特性.陀螺儀可以測(cè)量高速轉(zhuǎn)動(dòng)下的轉(zhuǎn)動(dòng)角速度,擁有良好的動(dòng)態(tài)響應(yīng)性,但是自身也有缺點(diǎn),隨著時(shí)間的累積,對(duì)轉(zhuǎn)動(dòng)的角速度進(jìn)行積分就會(huì)產(chǎn)生累積誤差,發(fā)生漂移.加速度計(jì)可以測(cè)量載體在三軸方向上的加速度,在靜態(tài)或勻速狀態(tài)下,可以通過(guò)重力加速度在三軸上的分量準(zhǔn)確求得俯仰角和翻滾角.三軸磁力計(jì)通過(guò)感應(yīng)當(dāng)?shù)氐拇艌?chǎng)通量來(lái)計(jì)算載體方位姿態(tài),所在地球磁場(chǎng)恒定不變時(shí),磁力計(jì)在靜態(tài)下有良好的測(cè)量特性,不會(huì)隨時(shí)間發(fā)生漂移.因此,根據(jù)加速度計(jì)和磁力計(jì)數(shù)據(jù)解算得到的姿態(tài)角可作為參考值對(duì)陀螺儀的解算結(jié)果進(jìn)行校正.由于每個(gè)傳感器都有自己的特性,需要各傳感器之間的相互配合才能達(dá)到人體姿態(tài)跟蹤的目的.為了克服慣性傳感器和磁力計(jì)的缺點(diǎn),一些文章還結(jié)合了UWB[54]、視覺(jué)[80?82]、編碼器[83]和超聲波[84]等其他傳感器.
早期最常用的傳感器組合是陀螺儀和加速度計(jì),其中Luinge 等[1,64,85]和EI-Gohary 等[5,71,86]均采用陀螺儀和加速度計(jì)的組合估計(jì)關(guān)節(jié)運(yùn)動(dòng)角度.另外,文獻(xiàn)[87?89]同樣只采用了陀螺儀和加速度計(jì).由于加速度計(jì)的測(cè)量值只能用來(lái)校正翻滾角和俯仰角,無(wú)法校正航向角的誤差,文獻(xiàn)[64,86]分別通過(guò)肘關(guān)節(jié)自由度約束和零速度更新算法,校正陀螺儀漂移對(duì)航向角的影響.三軸磁力計(jì)可根據(jù)磁場(chǎng)強(qiáng)度測(cè)量值確定傳感器模塊與地磁北極的偏角,因此可用來(lái)校正航向角.大部分文章均采用陀螺儀、加速度計(jì)和磁力計(jì)的組合進(jìn)行人體位姿估計(jì),其中Bachmann 等[2?3]、Roetenberg 等[90?91]、Yun等[4,92?93]、Zhou 等[47,94?95]、Zhang 等[7,63,96]、Sabatini 等[97?99]和Fourati 等[100?101]的工作較為突出.另外,文獻(xiàn)[32,102]僅采用加速度計(jì)研究了上肢在矢狀面的運(yùn)動(dòng).
慣性傳感器面臨的最大問(wèn)題是存在隨機(jī)漂移,為了進(jìn)一步提高人體位姿估計(jì)的精度,一些文獻(xiàn)將不易受到隨機(jī)漂移干擾的傳感器與慣性傳感器相結(jié)合.文獻(xiàn)[80]利用慣性傳感器和Kinect 傳感器實(shí)現(xiàn)機(jī)械手遙操作,機(jī)械手可模擬人手完成抓取物品和釘釘子等動(dòng)作.文獻(xiàn)[81?82]提出了基于單目視覺(jué)和6 軸慣性傳感器的上肢位置估計(jì)方法.文獻(xiàn)[54]介紹了一種將慣性傳感器與超寬帶(UWB)定位系統(tǒng)相結(jié)合的人體運(yùn)動(dòng)的三維定位和姿態(tài)跟蹤算法,UWB 的測(cè)量數(shù)據(jù)可替代磁力計(jì)達(dá)到校正航向角的目的.文獻(xiàn)[83]基于光電編碼器和加速度計(jì),設(shè)計(jì)了能夠跟蹤手臂運(yùn)動(dòng)的傳感網(wǎng)系統(tǒng).文獻(xiàn)[84]結(jié)合超聲波傳感器和慣性傳感器估計(jì)人步行時(shí)的相對(duì)位置.
3.2 傳感器誤差
如上所述,陀螺儀信號(hào)存在隨機(jī)漂移,雖然在短時(shí)間內(nèi)直接對(duì)陀螺儀信號(hào)進(jìn)行積分能保證輸出角度的準(zhǔn)確性,但隨著時(shí)間的增加,輸出誤差也累積增加,因此不適合單獨(dú)使用陀螺儀進(jìn)行姿態(tài)計(jì)算.加速度計(jì)除了存在隨機(jī)漂移外,還易受線性加速度的影響,磁力計(jì)的測(cè)量精度易受到磁場(chǎng)干擾的影響.文獻(xiàn)[87]比較了九軸IMU 在靜態(tài)、慢速運(yùn)動(dòng)和動(dòng)態(tài)運(yùn)動(dòng)下的角度測(cè)量精度,實(shí)驗(yàn)結(jié)果表明,如果不對(duì)傳感器誤差加以補(bǔ)償,就會(huì)引起動(dòng)態(tài)精度的下降.下面從隨機(jī)漂移、線性加速度干擾和磁力計(jì)擾動(dòng)三部分展開(kāi)敘述.
1)隨機(jī)漂移
針對(duì)陀螺儀和加速度計(jì)的隨機(jī)漂移,文獻(xiàn)[50,64,86]將隨機(jī)漂移建模成一階高斯–馬爾科夫過(guò)程,并利用卡爾曼濾波器進(jìn)行在線估計(jì),從而可實(shí)時(shí)補(bǔ)償該隨機(jī)漂移.文獻(xiàn)[103]在估計(jì)肘部和腕部的位置時(shí),對(duì)相鄰采樣時(shí)刻的位置變化量人為設(shè)定一個(gè)上界,可在一定程度上減小隨機(jī)漂移的累積誤差對(duì)位置估計(jì)的影響,在下肢的位姿估計(jì)中,常使用零速度更新算法來(lái)消除傳感器誤差的累積[17?18,50,97],使人體步態(tài)參數(shù)更準(zhǔn)確,將誤差累積限制在每一步之內(nèi),最大限度地減小誤差累積.使用零速度誤差補(bǔ)償?shù)睦碚撘罁?jù)為:在每一步的開(kāi)始階段(起步)和結(jié)束階段(站立),足部速度應(yīng)為零.由于客觀存在的傳感器噪聲和信號(hào)漂移會(huì)導(dǎo)致積分誤差,使得在每一步的完全站立階段足部速度不為零,這就需要使用這個(gè)非零值對(duì)速度進(jìn)行誤差補(bǔ)償,從而滿(mǎn)足客觀真實(shí)狀態(tài),誤差補(bǔ)償最簡(jiǎn)單的方式是直接將處于完全站立相的足部速度置為零.
2)線性加速度
在跟蹤人體運(yùn)動(dòng)時(shí),加速度計(jì)通常處于動(dòng)態(tài)環(huán)境中,當(dāng)人體運(yùn)動(dòng)的加速度相對(duì)于重力加速度無(wú)法忽略時(shí),此時(shí)根據(jù)加速度計(jì)測(cè)量值計(jì)算出的俯仰角和橫滾角存在較大的誤差,如果不對(duì)線性加速度計(jì)加以補(bǔ)償,就會(huì)引起動(dòng)態(tài)精度的下降.因此,學(xué)者們提出了一些線性加速度檢測(cè)方法[57,63,68,88,104?105],一般將線性加速度擴(kuò)張成系統(tǒng)的狀態(tài)變量,通過(guò)各種濾波方法進(jìn)行估計(jì).當(dāng)檢測(cè)到線性加速度后,一方面可直接從加速度計(jì)的測(cè)量值中消除線性加速度分量[57,88],消除線性加速度分量之后,加速度計(jì)測(cè)量值只剩下重力加速度分量,可直接用于解算俯仰角和翻滾角.另一方面可根據(jù)線性加速度的大小自適應(yīng)調(diào)整加速度計(jì)量測(cè)噪聲方差的大小[63,68,104?105].文獻(xiàn)[68]根據(jù)線性加速度的大小對(duì)方差進(jìn)行二值調(diào)整,當(dāng)線性加速度與重力加速度之差小于設(shè)定閾值時(shí),方差為標(biāo)準(zhǔn)設(shè)定值,否則設(shè)置方差為一個(gè)較大的數(shù)值,減小當(dāng)前時(shí)刻加速度計(jì)的測(cè)量值在位姿估計(jì)中的權(quán)重,可避免線性加速度過(guò)大時(shí)導(dǎo)致位姿估計(jì)結(jié)果發(fā)生偏移.然而,僅對(duì)方差進(jìn)行二值調(diào)整過(guò)于簡(jiǎn)單,在兩者之差小于閾值時(shí),線性加速度的噪聲方差均設(shè)置為同一值不合理,因此,文獻(xiàn)[63,104?105]根據(jù)線性加速度的大小設(shè)計(jì)了連續(xù)的自適應(yīng)調(diào)整策略.特別地,文獻(xiàn)[105]為了提高自適應(yīng)濾波器的收斂速率,提出了一種基于隱馬爾科夫模型的自適應(yīng)調(diào)整策略.
3)磁力計(jì)擾動(dòng)
當(dāng)周?chē)嬖诖艌?chǎng)干擾時(shí),特別是在室內(nèi)環(huán)境中,磁力計(jì)的測(cè)量精度會(huì)受到很大的影響.磁場(chǎng)干擾可分為硬鐵干擾和軟鐵干擾.硬鐵干擾產(chǎn)生于永久磁鐵,這些干擾源的大小及與磁力計(jì)的相對(duì)位置固定,一般假設(shè)不變,可作為零偏處理.文獻(xiàn)[106]設(shè)計(jì)了兩步法校準(zhǔn)磁力計(jì),消除了磁力計(jì)的零偏.軟鐵干擾來(lái)自于磁力計(jì)附近的其余磁性材料的影響,軟鐵干擾一般是時(shí)變的擾動(dòng).
通常有兩種常用的策略用來(lái)解決時(shí)變磁力擾動(dòng)的問(wèn)題:a)基于閾值的方法.基于閾值法判斷每個(gè)采樣時(shí)刻的磁力計(jì)數(shù)據(jù)是否可用,如果與閾值相差較遠(yuǎn),則舍去該時(shí)刻的磁力計(jì)測(cè)量值或根據(jù)磁力計(jì)的測(cè)量值自適應(yīng)調(diào)整過(guò)程噪聲的方差.文獻(xiàn)[107]采用如下策略自適應(yīng)調(diào)整量測(cè)噪聲方差陣:如果當(dāng)前采樣時(shí)刻的量測(cè)值與前一時(shí)刻的量測(cè)值之間的誤差大于一個(gè)設(shè)定的閾值,則設(shè)置相應(yīng)的方差為一個(gè)較大的值,否則保持原來(lái)設(shè)定的方差值.文獻(xiàn)[108]將磁場(chǎng)強(qiáng)度的量測(cè)值與參考值進(jìn)行對(duì)比,如果兩者差值大于設(shè)定的閾值,則舍棄該時(shí)刻的量測(cè)值,當(dāng)小于閾值時(shí),則根據(jù)差值大小實(shí)時(shí)調(diào)整噪聲方差.文獻(xiàn)[109]與文獻(xiàn)[108]相似,需將當(dāng)前時(shí)刻磁力測(cè)量值與設(shè)定的閾值對(duì)比,當(dāng)前時(shí)刻的磁力計(jì)量測(cè)值被舍棄時(shí),用一個(gè)預(yù)測(cè)值代替舍棄值作為QUEST 姿態(tài)解算算法的輸入.b)基于模型的方法.一般將磁力計(jì)擾動(dòng)擴(kuò)張成系統(tǒng)的狀態(tài)變量,通過(guò)各種濾波方法估計(jì)出磁力計(jì)擾動(dòng),從而可在磁力計(jì)測(cè)量值中補(bǔ)償該擾動(dòng).文獻(xiàn)[90,98]將磁力計(jì)擾動(dòng)建模成一階馬爾科夫過(guò)程,分別通過(guò)互補(bǔ)卡爾曼濾波器和EKF 估計(jì)磁力計(jì)擾動(dòng),估計(jì)結(jié)果用來(lái)修正由陀螺儀解算得到的角度.文獻(xiàn)[99]提出了狀態(tài)維數(shù)可變的EKF 算法,在磁力計(jì)擾動(dòng)較小時(shí),采用一階馬爾科夫過(guò)程描述磁力計(jì)擾動(dòng),當(dāng)磁力計(jì)擾動(dòng)較大時(shí),采用二階馬爾科夫過(guò)程描述磁力計(jì)擾動(dòng).文獻(xiàn)[110]總結(jié)了基于卡爾曼濾波的磁力計(jì)擾動(dòng)補(bǔ)償方法.
3.3 數(shù)據(jù)融合方法
人體運(yùn)動(dòng)跟蹤通過(guò)對(duì)信息的采集、坐標(biāo)系的變換,得到人體位姿估計(jì)的結(jié)果.然而,單個(gè)傳感器由于受到噪聲干擾等影響,往往導(dǎo)致姿態(tài)跟蹤精度較低,因此,多傳感器信息融合成為提高姿態(tài)跟蹤精度的良好途徑.人體運(yùn)動(dòng)跟蹤中最常采用的數(shù)據(jù)融合方法是互補(bǔ)濾波器和卡爾曼濾波器,隨著微型芯片計(jì)算能力的提高,粒子濾波和基于優(yōu)化的數(shù)據(jù)融合方法也逐漸被用于在線估計(jì)人體的姿態(tài).
3.3.1 互補(bǔ)濾波
加速度計(jì)和磁力計(jì)容易受到高頻噪聲的干擾,陀螺儀容易受到隨機(jī)漂移等低頻噪聲的干擾,互補(bǔ)濾波器就是將加速度計(jì)和磁力計(jì)測(cè)量的靜態(tài)姿態(tài)通過(guò)低通濾波器去除高頻分量,將陀螺儀測(cè)量的動(dòng)態(tài)姿態(tài)通過(guò)高通濾波器去除低頻分量,從而實(shí)現(xiàn)姿態(tài)信息的融合估計(jì).Bachmann 等[2?3]提出了基于加速度計(jì)和磁力計(jì)的四元數(shù)互補(bǔ)濾波器補(bǔ)償陀螺儀信號(hào)的漂移.文獻(xiàn)[100?101]提出了一種濾波器框架,先將加速度計(jì)和磁力計(jì)的測(cè)量值通過(guò)Levenberg-Marquardt 算法進(jìn)行姿態(tài)解算,將解算結(jié)果結(jié)合陀螺儀的測(cè)量值作為互補(bǔ)觀測(cè)器的輸入,進(jìn)而得到姿態(tài)估計(jì)的結(jié)果.文獻(xiàn)[111]結(jié)合TRIAD 姿態(tài)解算算法和互補(bǔ)濾波器重建人體關(guān)節(jié)在世界坐標(biāo)系下的姿態(tài).
上文提到的互補(bǔ)濾波器中,互補(bǔ)濾波器的參數(shù)保持不變,然而當(dāng)人體處于不同的運(yùn)動(dòng)狀態(tài)時(shí),傳感器的頻率特性會(huì)發(fā)生變化,針對(duì)這一情況,一些學(xué)者提出了自適應(yīng)互補(bǔ)濾波器[89,112?113]和時(shí)變互補(bǔ)濾波器[114].文獻(xiàn)[89]提出了一種自適應(yīng)互補(bǔ)濾波器,將陀螺儀和加速度計(jì)的測(cè)量值分別進(jìn)行姿態(tài)解算得到的姿態(tài)角進(jìn)行線性組合,線性組合的系數(shù)根據(jù)陀螺儀和加速度計(jì)數(shù)據(jù)自適應(yīng)改變,原則是靜態(tài)時(shí)加速度計(jì)的解算姿態(tài)系數(shù)占優(yōu),動(dòng)態(tài)時(shí)陀螺儀的解算姿態(tài)系數(shù)占優(yōu).文獻(xiàn)[112]將磁力計(jì)和加速度計(jì)的測(cè)量值通過(guò)高斯牛頓法解算四元數(shù),接著與陀螺儀測(cè)量值解算得到的四元數(shù)進(jìn)行線性組合,線性組合的系數(shù)根據(jù)高斯牛頓算法的收斂速度自適應(yīng)調(diào)整.文獻(xiàn)[114]基于模糊準(zhǔn)則在線調(diào)整濾波器的截止頻率,以適應(yīng)加速度計(jì)和磁力計(jì)在運(yùn)動(dòng)過(guò)程中的時(shí)變物理特性.
3.3.2 卡爾曼濾波
1)線性卡爾曼濾波
Luinge 等在1999 年[1]提出了基于線性互補(bǔ)卡爾曼濾波器的人體姿態(tài)估計(jì)方法,首先直接通過(guò)角速度積分得到三個(gè)姿態(tài)角,將翻滾角和俯仰角定義為傾斜角,由加速度計(jì)測(cè)量值也可得到一組傾斜角,兩者之差經(jīng)基于誤差模型的卡爾曼濾波器濾波后補(bǔ)償由角速度積分得到的傾斜角.隨后進(jìn)一步考慮陀螺儀的偏差和線性加速度,分別將偏差和線性加速度建模成一階馬爾科夫過(guò)程和一階低通白噪聲過(guò)程,進(jìn)而可在濾波過(guò)程中估計(jì)和補(bǔ)償陀螺儀偏差和線性加速度,提高了姿態(tài)估計(jì)的精度[85].然而,Luinge等只采用了陀螺儀和加速度計(jì),無(wú)法補(bǔ)償航向角的誤差,因此Roetenberg 等[90]在前文基礎(chǔ)上加入了磁力計(jì)以校正航向角,該文提出的線性卡爾曼濾波器有兩個(gè)輸入,第一個(gè)輸入為加速度計(jì)與陀螺儀之間的傾斜角差值,第二個(gè)輸入為陀螺儀與磁力計(jì)之間的航向角差值.文獻(xiàn)[50]提出了兩層融合算法,在第二層融合引入下肢位置約束,通過(guò)線性卡爾曼濾波器得到約束融合后的人體位移.另外,文獻(xiàn)[39,54,80,88,103,109,115]同樣采用了線性卡爾曼濾波器.
2)擴(kuò)展卡爾曼濾波
人體位姿估計(jì)系統(tǒng)往往建模為非線性系統(tǒng),此時(shí)線性卡爾曼濾波器不再適用,EKF 和UKF 是兩種最常見(jiàn)的非線性濾波器.不同于文獻(xiàn)[90],Roetenberg 等在文獻(xiàn)[91]中采用非線性模型描述姿態(tài)估計(jì)過(guò)程并用EKF 算法實(shí)現(xiàn)姿態(tài)估計(jì).Yun 等[4]通過(guò)高斯–牛頓迭代法從加速度計(jì)和磁力計(jì)的測(cè)量值中解算出四元數(shù),把該組四元數(shù)和角速度作為新的量測(cè)值,則輸出方程轉(zhuǎn)化為線性形式,此時(shí)僅狀態(tài)方程為非線性,可簡(jiǎn)化EKF 的計(jì)算.該方法在上肢姿態(tài)估計(jì)中得到了應(yīng)用[92?93].在下肢關(guān)節(jié)角度估計(jì)中,文獻(xiàn)[51]提出了兩種不同的下肢運(yùn)動(dòng)學(xué)模型,分別以骨盆和切換的站立腳為基坐標(biāo)系原點(diǎn),使用EKF 融合加速度計(jì)和陀螺儀的數(shù)據(jù).為了增強(qiáng)位姿估計(jì)算法對(duì)運(yùn)動(dòng)過(guò)程中產(chǎn)生的未知的線性加速度和磁力計(jì)擾動(dòng)的適應(yīng)能力,文獻(xiàn)[105,107]采用自適應(yīng)EKF 算法,量測(cè)噪聲的方差根據(jù)線性加速度干擾或磁力計(jì)擾動(dòng)自適應(yīng)調(diào)整,這些文獻(xiàn)的自適應(yīng)策略已在第3.2 節(jié)中提到.此外,Sabatini 等[97?99]同樣采用了EKF 算法估計(jì)人體位姿.
3)無(wú)跡卡爾曼濾波
EI-Gohary 等[5]首次將上肢5 自由度運(yùn)動(dòng)學(xué)模型引入到上肢關(guān)節(jié)角度估計(jì)中,將關(guān)節(jié)角度作為狀態(tài)變量,采用勻加速模型作為狀態(tài)方程,量測(cè)方程中引入了上肢運(yùn)動(dòng)學(xué)模型來(lái)描述陀螺儀和加速度計(jì)測(cè)量值與狀態(tài)變量之間的關(guān)系,采用UKF 算法估計(jì)上肢5 個(gè)自由度的旋轉(zhuǎn)角度.為進(jìn)一步提高各個(gè)關(guān)節(jié)角估計(jì)的精度,在前文基礎(chǔ)上,文獻(xiàn)[86]進(jìn)行了以下幾方面的改進(jìn):1)將陀螺儀和加速度計(jì)的偏差建模成高斯白噪聲,并擴(kuò)張為新的狀態(tài)變量進(jìn)行估計(jì)和補(bǔ)償;2)根據(jù)上肢關(guān)節(jié)的運(yùn)動(dòng)角度范圍對(duì)每個(gè)關(guān)節(jié)角引入狀態(tài)約束,采用具有狀態(tài)約束的UKF 算法;3)在航向角的估計(jì)中引入零速度更新算法以校正陀螺儀漂移對(duì)航向角的影響.此外,文獻(xiàn)[6,71,96]采用了基于5 自由度上肢運(yùn)動(dòng)模型的UKF 算法.同樣采用UKF 算法,文獻(xiàn)[45]基于7 自由度的上肢模型,文獻(xiàn)[116]將上肢模型簡(jiǎn)化為4 自由度.文獻(xiàn)[63,68,104]采用了自適應(yīng)UKF,同樣地,這些文獻(xiàn)的自適應(yīng)策略也已在第3.2 節(jié)中提到.
3.3.3 粒子濾波
粒子濾波器無(wú)需像卡爾曼濾波器一樣假設(shè)噪聲為高斯分布,因此更具有一般性,隨著微芯片計(jì)算能力的提高,使得應(yīng)用粒子濾波器用于實(shí)時(shí)估計(jì)成為可能.文獻(xiàn)[7,66]分別采用分層融合的思想估計(jì)上肢和下肢的運(yùn)動(dòng)姿態(tài),第一層為數(shù)據(jù)融合層,第二層為幾何約束融合層.文獻(xiàn)[82]基于視覺(jué)和慣性傳感器實(shí)現(xiàn)上肢運(yùn)動(dòng)跟蹤,為避免粒子退化,對(duì)狀態(tài)空間進(jìn)行約簡(jiǎn)且引入了手臂的生物學(xué)約束.
3.3.4 基于優(yōu)化的方法
隨著微型芯片計(jì)算能力的提高,基于優(yōu)化的方法逐漸被應(yīng)用于人體位姿估計(jì)中.文獻(xiàn)[47,94]提出了基于模擬退火算法的上肢關(guān)節(jié)位置估計(jì)方法,以計(jì)算得到的上臂長(zhǎng)度與真實(shí)長(zhǎng)度之間的偏差最小化作為優(yōu)化目標(biāo),通過(guò)模擬退火算法求解該優(yōu)化問(wèn)題.文獻(xiàn)[95]通過(guò)拉格朗日乘子法估計(jì)肩膀的位移.文獻(xiàn)[32]以重力加速度分量與加速度計(jì)測(cè)量值之差的平方最小化為優(yōu)化目標(biāo),通過(guò)牛頓迭代法求解最優(yōu)四元數(shù),由于只使用了加速度計(jì),因此所得結(jié)果的應(yīng)用范圍只能限制在手臂靜止或慢速運(yùn)動(dòng)時(shí),一旦因手臂運(yùn)動(dòng)產(chǎn)生的線性加速度相對(duì)于重力的分量不可忽略時(shí),優(yōu)化結(jié)果會(huì)出現(xiàn)較大偏差.文獻(xiàn)[17?18]在步態(tài)分析中采用梯度下降算法求解最優(yōu)四元數(shù).
4 應(yīng)用場(chǎng)景
近年來(lái),由于微慣性傳感器的發(fā)展得到廣泛關(guān)注及應(yīng)用,越來(lái)越多的學(xué)者將基于慣性傳感器的人體運(yùn)動(dòng)跟蹤技術(shù)應(yīng)用于康復(fù)治療、步態(tài)分析、人體安全監(jiān)測(cè)、人機(jī)交互、體育訓(xùn)練和虛擬現(xiàn)實(shí)等領(lǐng)域.
1)康復(fù)治療
通過(guò)將包含慣性傳感器的節(jié)點(diǎn)設(shè)備佩戴在康復(fù)階段的病人身上,醫(yī)生可以通過(guò)分析病人的日常生活狀況及活動(dòng)狀況,對(duì)病人的行為能力和運(yùn)動(dòng)強(qiáng)度作出判斷,從而了解病人的身體恢復(fù)情況,并隨時(shí)針對(duì)病人的恢復(fù)情況作出診斷修改,以適應(yīng)不同康復(fù)階段的需要,給予康復(fù)期的病人最優(yōu)的治療方案.英國(guó)的Zhou 和Hu 等[47,94?95,103]以中風(fēng)病人的上肢康復(fù)為背景,基于Xsens 公司生產(chǎn)的可穿戴式慣性傳感器,設(shè)計(jì)了上肢關(guān)節(jié)位置估計(jì)系統(tǒng),估計(jì)精度可完全滿(mǎn)足中風(fēng)病人上肢康復(fù)的需求.文獻(xiàn)[117?119]基于慣性傳感器設(shè)計(jì)了中風(fēng)病人康復(fù)運(yùn)動(dòng)的評(píng)估系統(tǒng),專(zhuān)業(yè)的理療師可通過(guò)聯(lián)網(wǎng)設(shè)備在線監(jiān)測(cè)病人是否按照規(guī)定完成了指定的康復(fù)動(dòng)作.文獻(xiàn)[120]通過(guò)固定在康復(fù)患者鞋上的慣性傳感器和足底壓力傳感器跟蹤患者行走軌跡、步行距離和步幅,理療師通過(guò)遠(yuǎn)程監(jiān)控患者的步行數(shù)據(jù)可評(píng)估患者的康復(fù)情況.文獻(xiàn)[121]列舉了可穿戴式的傳感器在上肢康復(fù)訓(xùn)練中的應(yīng)用.
2)步態(tài)分析
步態(tài)分析是一項(xiàng)針對(duì)人體步行運(yùn)動(dòng)分析的技術(shù),旨在研究步行的內(nèi)在規(guī)律,步態(tài)分析的過(guò)程包含了測(cè)量,并對(duì)可測(cè)量的步態(tài)參數(shù)進(jìn)行計(jì)算、分析與解釋,進(jìn)而得出結(jié)論,對(duì)被測(cè)者的步行能力得出綜合評(píng)估.由于步行運(yùn)動(dòng)包含了大量的人體運(yùn)動(dòng)學(xué)信息,步態(tài)分析在疾病診斷[122?124]和身份識(shí)別[125?126]等領(lǐng)域都有重要意義.通過(guò)佩戴在下肢不同部位的慣性傳感器,可采集各類(lèi)患者和健康人群的運(yùn)動(dòng)數(shù)據(jù).由于疾病的影響,患者在步行過(guò)程中表現(xiàn)出的步態(tài)參數(shù)異于常人,通過(guò)簡(jiǎn)單的分類(lèi)可辨別是否罹患帕金森綜合征[122]或中風(fēng)[123]等疾病.文獻(xiàn)[124]通過(guò)機(jī)器學(xué)習(xí)方法對(duì)肌萎縮側(cè)索硬化(Amyotrophic lateral sclerosis,ALS)、帕金森綜合征和亨廷頓舞蹈病(Huntington′s disease)三種疾病進(jìn)行分類(lèi).在身份識(shí)別和安全領(lǐng)域,步態(tài)信息可以用來(lái)對(duì)人的身份進(jìn)行鑒別.正如每個(gè)人都有獨(dú)一無(wú)二的指紋和虹膜,每個(gè)人也都有獨(dú)一無(wú)二的步行習(xí)慣.通過(guò)采集大量人群的步態(tài)參數(shù),建立數(shù)據(jù)庫(kù),可尋找當(dāng)前步態(tài)參數(shù)與數(shù)據(jù)庫(kù)中最匹配的個(gè)體,從而識(shí)別人的身份[125?126].
3)安全監(jiān)測(cè)
由于慣性傳感器體積小、可穿戴,所以能輕松地佩戴在人身上,檢測(cè)人日常運(yùn)動(dòng)時(shí)的運(yùn)動(dòng)學(xué)信息,對(duì)這些運(yùn)動(dòng)學(xué)信息的分析,可用于工人在工作過(guò)程中的損傷評(píng)估和老人異常行為的監(jiān)控.
工人在完成搬運(yùn)貨物、操作大型機(jī)械設(shè)備等工作時(shí),由于人體承受了較大的力,一旦動(dòng)作不規(guī)范或長(zhǎng)期處于這樣的工作環(huán)境中,骨骼和肌肉很容易受到損傷.文獻(xiàn)[127]借助IMU 和角度傳感器對(duì)人體上肢的運(yùn)動(dòng)進(jìn)行檢測(cè),實(shí)時(shí)評(píng)估工人在工作過(guò)程中發(fā)生肌肉骨骼損傷的風(fēng)險(xiǎn),工人可接收該反饋信號(hào),從而可在受到較大的損傷風(fēng)險(xiǎn)時(shí)及時(shí)停止危險(xiǎn)動(dòng)作.文獻(xiàn)[44,128]介紹了人體位姿估計(jì)在職業(yè)工人健康監(jiān)測(cè)中的應(yīng)用,通過(guò)基于慣性傳感器和磁力計(jì)監(jiān)測(cè)工人的關(guān)節(jié)彎曲角度,可評(píng)估工人是否處于一個(gè)危險(xiǎn)的動(dòng)作,或工人受到損傷后,具體確定是由哪一部分工作造成的損傷.
在老年人跌倒檢測(cè)的研究方面,文獻(xiàn)[129]通過(guò)佩戴在左右膝蓋和胸部的三個(gè)慣性傳感器,對(duì)因打滑、絆倒、昏厥等7 種造成跌倒的動(dòng)作進(jìn)行識(shí)別,以便跌倒者可接受針對(duì)性的治療.文獻(xiàn)[130]提出了一個(gè)專(zhuān)為老年人跌倒保護(hù)設(shè)計(jì)的移動(dòng)式人體安全氣囊系統(tǒng),利用支持向量機(jī)算法對(duì)跌倒和其他正常運(yùn)動(dòng)進(jìn)行分類(lèi),當(dāng)檢測(cè)到跌倒動(dòng)作時(shí),佩戴在腰部的安全氣囊會(huì)自動(dòng)打開(kāi)以降低老人在跌倒過(guò)程中發(fā)生損傷的危險(xiǎn).
4)人機(jī)交互
在工業(yè)4.0 背景下,人和機(jī)器人如何協(xié)作以更好地完成相關(guān)任務(wù)已成為一種重要的發(fā)展趨勢(shì).目前,機(jī)器人只是作為人的替代者完成一些高風(fēng)險(xiǎn)、高重復(fù)度的工作,例如汽車(chē)裝配車(chē)間的裝配機(jī)械手.例如何讓人參與到完成一些任務(wù)的過(guò)程中是未來(lái)機(jī)器人技術(shù)發(fā)展的一個(gè)重要問(wèn)題.目前,基于慣性傳感器的人機(jī)協(xié)作只能實(shí)現(xiàn)一些低復(fù)雜度的運(yùn)動(dòng),如讓機(jī)器手模擬人手臂的動(dòng)作[131?133].2004 年,加州州立大學(xué)的Miller 等[131]通過(guò)固定在人手臂上的兩個(gè)慣性傳感器捕捉上肢的運(yùn)動(dòng)姿態(tài),從而遙控NASA 的上半身宇航機(jī)器人.文獻(xiàn)[132]通過(guò)VR 眼鏡實(shí)現(xiàn)遠(yuǎn)程操控Kuka Youbot 機(jī)械臂抓取物品.文獻(xiàn)[133]通過(guò)慣性傳感器得到人腕部的運(yùn)動(dòng)軌跡,通過(guò)一個(gè)3自由度的機(jī)器人復(fù)現(xiàn)腕關(guān)節(jié)的運(yùn)動(dòng)軌跡.為了提高機(jī)器人復(fù)現(xiàn)人動(dòng)作的精度和復(fù)雜度,文獻(xiàn)[80]結(jié)合Kinect 相機(jī)獲得手部在全局坐標(biāo)系下的位置,同時(shí)通過(guò)IMU 獲得手部的角度信息,將手部的角度和位置信息發(fā)送給機(jī)械手,讓機(jī)械手實(shí)現(xiàn)抓取和放置物品、釘釘子等復(fù)雜任務(wù).文獻(xiàn)[134]提出一種基于前臂表面肌電信號(hào)和慣性多源信息融合的隱式交互方法來(lái)實(shí)現(xiàn)協(xié)作機(jī)器人的演示編程.在2018 世界移動(dòng)通信大會(huì)(WMC)上,來(lái)自日本的公司展示了基于5 G 通訊的人形助理機(jī)器人.將機(jī)器人與人類(lèi)操作者通過(guò)5 G 網(wǎng)絡(luò)連接,通過(guò)Xsens 公司的動(dòng)作捕捉套裝采集人體運(yùn)動(dòng)信息,人形助理機(jī)器人通過(guò)采集的人體運(yùn)動(dòng)信息模仿人類(lèi)操作者的各種復(fù)雜動(dòng)作.另外,在人機(jī)交互領(lǐng)域,識(shí)別騎行者在騎行過(guò)程中的姿態(tài)[135?136]也是一個(gè)典型的應(yīng)用,其研究成果可應(yīng)用于帕金森病人的康復(fù)訓(xùn)練和人體姿勢(shì)矯正.
5)體育訓(xùn)練
通過(guò)捕捉運(yùn)動(dòng)員在訓(xùn)練過(guò)程中的運(yùn)動(dòng)數(shù)據(jù),教練員可對(duì)運(yùn)動(dòng)員的訓(xùn)練過(guò)程進(jìn)行評(píng)估,從而對(duì)之后的訓(xùn)練項(xiàng)目提出針對(duì)性的指導(dǎo)意見(jiàn),例如飛鏢投擲訓(xùn)練[137]、棒球手訓(xùn)練[138]、高爾夫訓(xùn)練[139]等.諾亦騰公司推出的mySwing Pro 系統(tǒng)是用于高爾夫球訓(xùn)練教學(xué)的全身動(dòng)作捕捉分析系統(tǒng),可在室外環(huán)境中精確捕捉球手全身動(dòng)作以及球桿運(yùn)動(dòng)軌跡,并進(jìn)行實(shí)時(shí)回放分析.通過(guò)3D 模型、分析圖表等多種輔助參考工具,球手可以全面觀察分析自身?yè)]桿動(dòng)作,并與技術(shù)更高的專(zhuān)業(yè)球手進(jìn)行比對(duì).另外,在體育競(jìng)技過(guò)程中,通過(guò)實(shí)時(shí)監(jiān)測(cè)運(yùn)動(dòng)員的運(yùn)動(dòng)數(shù)據(jù),可評(píng)估運(yùn)動(dòng)員的各項(xiàng)指標(biāo)和比賽表現(xiàn),進(jìn)一步可對(duì)運(yùn)動(dòng)方案作出調(diào)整,避免運(yùn)動(dòng)員由于過(guò)度訓(xùn)練和不當(dāng)動(dòng)作造成不必要的損傷,進(jìn)而影響比賽結(jié)果,例如在滑雪[140?141]、游泳[142?143]、跑步[144?145]等方面的應(yīng)用.文獻(xiàn)[24]列舉了慣性傳感器在體育競(jìng)技領(lǐng)域的應(yīng)用.
6)虛擬現(xiàn)實(shí)與影視制作
通過(guò)慣性傳感器設(shè)備捕捉人體的動(dòng)作信息并進(jìn)行重現(xiàn),即人體捕捉技術(shù)的出現(xiàn),給虛擬現(xiàn)實(shí)技術(shù)的發(fā)展帶來(lái)了新的希望.通過(guò)固定在參與者身體特定部位的慣性傳感器設(shè)備可采集到受環(huán)境干擾小的人體動(dòng)作信息,經(jīng)過(guò)相應(yīng)數(shù)據(jù)處理后可加載到電腦動(dòng)畫(huà)中,從而實(shí)現(xiàn)基于虛擬現(xiàn)實(shí)技術(shù)的動(dòng)畫(huà)和游戲的開(kāi)發(fā)制作.在影視制作中,通過(guò)固定在人體上的傳感器節(jié)點(diǎn),可以獲取動(dòng)作數(shù)據(jù)并進(jìn)行重現(xiàn),應(yīng)用于影視制作中,能夠?qū)崿F(xiàn)電影中一些高難度動(dòng)作.
5 總結(jié)與展望
基于可穿戴式慣性傳感器的人體運(yùn)動(dòng)跟蹤技術(shù),借助佩戴在身體各部位的微慣性傳感器和磁力計(jì),通過(guò)姿態(tài)解算方法和數(shù)據(jù)融合方法可實(shí)時(shí)跟蹤人體的運(yùn)動(dòng)姿態(tài).由于具有佩戴方便、運(yùn)動(dòng)空間不受限、成本低等優(yōu)點(diǎn),已廣泛應(yīng)用于許多領(lǐng)域.本文對(duì)慣性式人體運(yùn)動(dòng)跟蹤技術(shù)的產(chǎn)生發(fā)展以及當(dāng)前的研究現(xiàn)狀進(jìn)行了比較詳細(xì)的綜述,由以上綜述可見(jiàn),慣性式人體運(yùn)動(dòng)跟蹤方法已十分豐富,尤其在傳感器誤差處理和數(shù)據(jù)融合方法上,涌現(xiàn)了很多獨(dú)具特色的研究,且目前市場(chǎng)也已出現(xiàn)成熟的慣性式人體運(yùn)動(dòng)捕捉的產(chǎn)品.但是由于人體運(yùn)動(dòng)的復(fù)雜性和慣性傳感器本身的特點(diǎn),使得研發(fā)高精度的慣性式人體運(yùn)動(dòng)檢測(cè)系統(tǒng)依然存在較大難度.在未來(lái)開(kāi)展基于可穿戴式慣性傳感器的人體運(yùn)動(dòng)姿態(tài)檢測(cè)時(shí),可關(guān)注以下研究點(diǎn):
1)模型不確定性問(wèn)題
在基于慣性傳感器對(duì)人體的位姿進(jìn)行重建和跟蹤時(shí),模型的不確定來(lái)自?xún)煞矫?一是人體關(guān)節(jié)不同于機(jī)械關(guān)節(jié),有些關(guān)節(jié)并不是嚴(yán)格按照固定的旋轉(zhuǎn)軸旋轉(zhuǎn),會(huì)存在一定的偏移[61,146],且有些關(guān)節(jié)的轉(zhuǎn)動(dòng)情況比較復(fù)雜[147];二是即使進(jìn)行了傳感器的初始校準(zhǔn),運(yùn)動(dòng)過(guò)程中由于皮膚和肌肉的形變會(huì)引起傳感器的位移,則初始校準(zhǔn)時(shí)得到的坐標(biāo)變換矩陣已存在偏差.到目前為止,對(duì)于關(guān)節(jié)軸的誤差并沒(méi)有很好的解決方法,一方面因?yàn)殛P(guān)節(jié)軸的誤差因人而異,另一方面引入更多的關(guān)節(jié)自由度勢(shì)必會(huì)增加建模和實(shí)時(shí)應(yīng)用的難度,且少有文獻(xiàn)討論皮膚或肌肉的形變對(duì)人體姿態(tài)估計(jì)的影響.因此,有必要針對(duì)不同體型的人群分析人體關(guān)節(jié)角度變化與皮膚或肌肉形變的定量關(guān)系,從而在人體運(yùn)動(dòng)過(guò)程中實(shí)時(shí)補(bǔ)償由形變帶來(lái)的偏差.
2)傳感器初始對(duì)準(zhǔn)誤差
由第2 節(jié)的分析可,知初始對(duì)準(zhǔn)方法的精度完全依賴(lài)于被測(cè)試者完成相應(yīng)對(duì)準(zhǔn)動(dòng)作的精度,然而由于個(gè)體的差異,被測(cè)試者無(wú)法完全標(biāo)準(zhǔn)地完成設(shè)定的動(dòng)作,例如N-pose 要求被測(cè)試者的手臂垂直向下,T-pose 要求被測(cè)試者的手臂保持水平.相比于靜止校準(zhǔn)方法,動(dòng)態(tài)的校準(zhǔn)方法雖然能夠取得更為精確的校準(zhǔn)結(jié)果,但是這個(gè)過(guò)程更為復(fù)雜且被測(cè)試者獨(dú)立完成標(biāo)準(zhǔn)的校準(zhǔn)動(dòng)作難度較大.現(xiàn)有的一些自校準(zhǔn)方法和無(wú)校準(zhǔn)方法較少且實(shí)現(xiàn)起來(lái)較為復(fù)雜,研究便捷精準(zhǔn)的傳感器初始對(duì)準(zhǔn)方法,甚至無(wú)需對(duì)準(zhǔn)的人體運(yùn)動(dòng)姿態(tài)估計(jì)方法,將有助于降低人體運(yùn)動(dòng)跟蹤系統(tǒng)的應(yīng)用難度.
3)多傳感器信息融合
傳感器誤差是導(dǎo)致基于慣性傳感器的人體位姿估計(jì)精度難以提高的重要原因.在現(xiàn)有文獻(xiàn)的基礎(chǔ)上,可進(jìn)一步研究結(jié)合其他不存在累積誤差的傳感器作為輔助傳感器,例如視覺(jué)傳感器、肌肉形變傳感器、力傳感器或肌電信號(hào)傳感器等,相應(yīng)獲取的信號(hào)作為校正信息消除累積誤差.例如肌肉電信號(hào)不易受到累積誤差的干擾,通過(guò)肌肉電信號(hào)與關(guān)節(jié)動(dòng)力學(xué)模型估計(jì)關(guān)節(jié)角度,此角度可對(duì)慣性傳感單元進(jìn)行校正.
4)復(fù)雜精確的人機(jī)協(xié)作場(chǎng)景
目前,基于慣性傳感器的人機(jī)協(xié)作只能完成一些低復(fù)雜度的運(yùn)動(dòng),對(duì)人體運(yùn)動(dòng)姿態(tài)估計(jì)精度要求不高.人機(jī)協(xié)作未來(lái)的研究方向必然是人與機(jī)器人更為緊密的協(xié)作,例如人和機(jī)器人共同完成一項(xiàng)任務(wù),此時(shí)就要求基于慣性傳感器的人體運(yùn)動(dòng)姿態(tài)估計(jì)技術(shù)具有較高的精度.因此,有必要研究高精度的慣性式人體運(yùn)動(dòng)姿態(tài)估計(jì)方法,從而實(shí)現(xiàn)復(fù)雜的人機(jī)協(xié)作.