蘋果裝箱一體化裝置的設計
2019-09-15 12:55:24黃可婧梁仙明劉宇李威武官儀陳紅
湖北農業科學 2019年15期
關鍵詞:單片機
黃可婧 梁仙明 劉宇 李威 武官儀 陳紅
摘要:針對中國果園蘋果人工裝箱效率低、勞動強度大的問題,設計了一種智能裝箱設備,實現采摘連續性、自動智能裝箱等功能,在提高果實裝箱效率的同時降低果實損傷率。該設備由垂直輸送裝置、升降裝置、均布裝置和檢測裝置組成。通過試驗分析,確定了均布裝置的結構參數和工作參數,即均布裝置轉速為40 r/min,均布裝置距果面高度10 cm,均布類置葉片長度60 cm。對裝箱設備關鍵部件進行設計,其中包括升降裝置、均布和檢測裝置。通過SolidWorks對整機進行設計。控制部分采用8個紅外避障傳感器,水平分布在扇葉所在的上升模塊上,當所在水平面上蘋果填充的數量達到設定標準時,單片機輸出信號,控制電機驅動模塊,實現均布裝置的自動提升,可滿足箱滿時均布裝置與箱體相配合的要求。
關鍵詞:蘋果裝箱裝置;均布;裝箱;單片機;紅外避障傳感器
中圖分類號:S255.93? ? ? ? ?文獻標識碼:A
文章編號:0439-8114(2019)15-0128-04
DOI:10.14088/j.cnki.issn0439-8114.2019.15.030? ? ? ? ? ?開放科學(資源服務)標識碼(OSID):
Apple packaging and integrated device design
HUANG Ke-jing,LIANG Xian-ming,LIU Yu,LI Wei,WU Guan-yi,CHEN Hong
(College of Engineering,Huazhong Agricultural University,Wuhan 430070,China)
Abstract: In view of the low efficiency and high labor intensity of citrus apples in orchards in China, a smart packing equipment was designed to realize the functions of picking continuity and automatic intelligent packing, which can improve fruit harvesting efficiency and reduce fruit damage. rate. The device consists of a vertical conveyor, a lifting device, a uniform and a detection device. Through the experimental analysis, the structural parameters and working parameters of the uniform device were determined, that is, the speed of the uniform device was 40 r/min, the height of the uniform device was 10cm from the fruit surface, and the blade length was 60 cm. The design of the key components of the boxing equipment is described, including lifting devices, uniforms, and inspection and detection devices. Design the entire machine through SolidWorks. The control part adopts 8 infrared sensors, which are horizontally distributed on the rising module where the fan blade is located. When the number of apple filling on the horizontal plane reaches the set standard, the single chip outputs a signal to control the motor drive module to realize the automatic lifting of the uniform device. Meet the requirements of the uniform distribution device and the box when the box is full.
Key words: apple packing device; uniform cloth; packing; single chip microcomputer; infrared obstacle avoidance sensor
中國是蘋果的重要原產地之一,蘋果資源豐富,優良品種繁多,有悠久的栽培歷史。蘋果廣受消費者的青睞,豐產穩產、經濟效益高,對果農脫貧致富、農村經濟發展起重大作用。但是現有技術中,蘋果從采摘、收集到裝箱各作業環節主要依靠人工完成,效率低,成本高,難以適應蘋果市場的快速發展。研究一種在國內果園具有較強適應性的果實智能收集、裝箱裝置具有重要意義。
國外水果采摘多采用振動式收獲機械、采摘機器人和大型果園采摘平臺,采摘作業過程多為大中型聯合作業,配套動力較高、價格昂貴,不適合大面積推廣應用。一些發達國家試驗了多種具有人工智能的采摘機器人,但由于采摘對象的復雜性和采摘環境的特殊性,目前市場上沒有商業化的采摘機器人。國內水果采摘機器人的研究主要集中在果實識別、定位和采摘,對果實傳送裝箱過程的研究很少,傳送裝箱系統會對果實造成一定的機械損傷。秦楠等[1]研制的可伸縮式蘋果采摘器結構簡單、使用方便,但不適用于大面積的果園;錢文池等[2]研制的多功能蝶式蘋果采摘器由采摘裝置、角度調節裝置、伸縮桿和水果收集裝置等四部分組成,可以連續采摘;邵強等[3]研制的自走式柔性智能蘋果采摘機能快速識別、精準采摘蘋果,但由于樹葉遮擋等問題,機器的識別率存在一定誤差。針對上述問題,設計一種適用于現代標準化果園的智能裝箱設備,以實現采摘連續性、自動收集、智能裝箱多功能,提高果園的采收效率、降低農民勞動強度。
1? 總體結構與工作原理
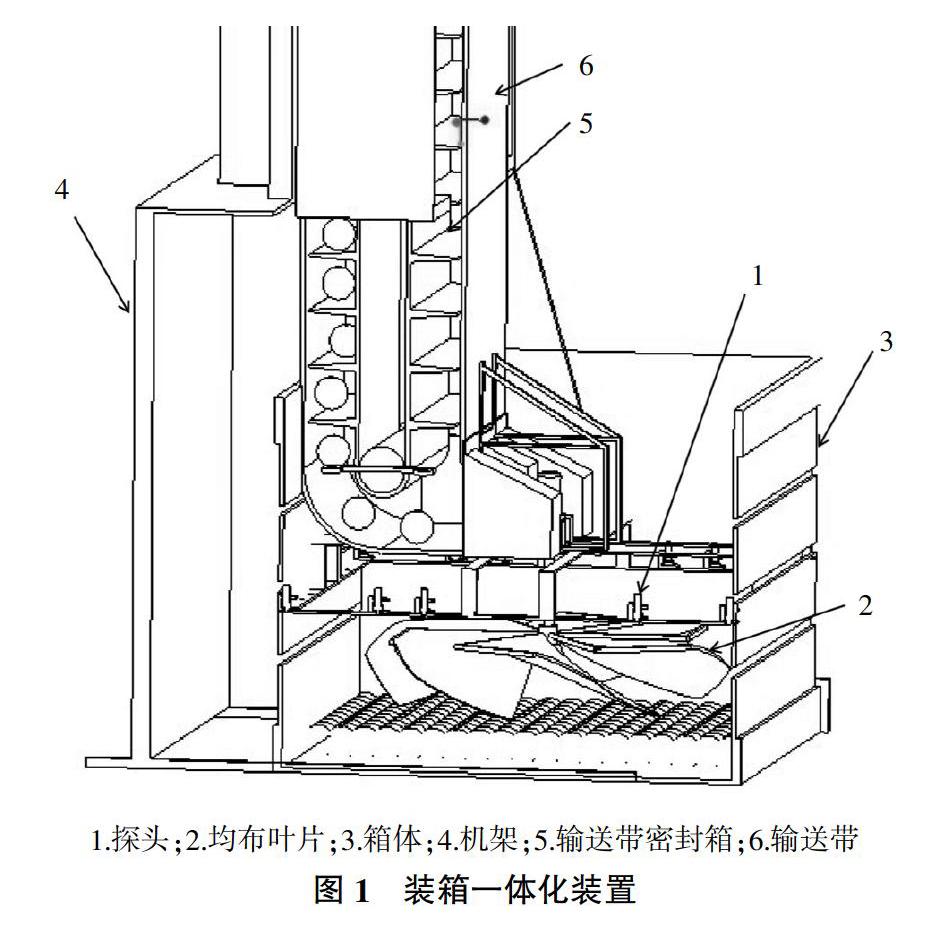
設計的蘋果裝箱一體化裝置結構如圖1所示,主要由果實收集裝置、絲杠、機架、輸送帶密封箱、輸送帶、均布與檢測裝置、箱體等組成。
收集、裝箱設備整體由垂直輸送裝置、均布裝置、檢測控制系統三部分組成。工作原理為蘋果通過不同方式(水果采收機輸送帶、工廠輸送帶等)匯集到蘋果收集裝置,并通過斜面進入輸送帶,輸送帶葉片同輸送帶密封箱之間形成一密閉空間約束果實。輸送到下端的果實通過均布葉片均勻分布在果箱中,當箱體內的一層蘋果鋪滿時,裝置將向上移動以利于下一層果實進入箱體中。探頭的分布由試驗確定。當箱體內鋪滿一層蘋果時,探頭將檢測果面與探頭之間的距離,當該距離達到設定值時,探頭給控制裝置相應信號。當信號探頭數量達到設定值時,控制裝置驅動絲杠,使得輸送裝置和探測裝置上升。此時,下一層果實開始均布入箱,探頭到果面距離超過設定值,裝置不再上升。一次循環過程直到箱體裝滿蘋果停止。
1.1? 均布與檢測裝置
均布與檢測裝置為整機的關鍵部件,其作用為:將蘋果均攤到箱中,盡量減少果實損傷率,并且檢測果面與均布葉片間的距離,從而對垂直輸送裝置的升降進行控制。蘋果均布裝置不僅可以緩沖蘋果下落時的沖擊力,降低蘋果的損壞率,還可以將蘋果均勻地分布在果箱中的不同部位。隨后進行試驗,最終得到均布裝置的相對最優工作參數,即均布裝置轉速40 r/min,均布裝置距果面高度10 cm,均布裝置葉片長60 cm。均布裝置整體是由上端的步進電機驅動,均布葉片的材料采用的是防靜電泡棉,泡棉具有彈性良好、重量輕、快速壓敏固定、使用方便、彎曲自如、體積超薄、性能可靠等優點,并且泡棉與果皮之間的摩擦系數很小,能最大限度的減小均布過程中的果實損傷率。當均布裝置滿載時,即有12個蘋果同時落在該均布葉片上。經計算,轉矩TM=1.67 N·m。
1.2? 升降裝置
升降裝置的主要作用是實現垂直輸送裝置和均布裝置整體升降。隨著果箱內果實的增加,通過升降裝置來提升垂直輸送裝置和均布葉片,以使果實能一層一層的裝入果箱。裝置組成及其作用:絲杠通過滑塊抬升整個裝置,且絲杠滑臺上下安裝有限位開關,均布裝置四周安裝有8個紅外避障傳感器。在設備啟動后,升降裝置下降,帶動垂直輸送裝置下移,滑塊觸碰到下限位開關時,裝箱工作準備就緒,在采摘過程中,果實不斷進入箱中,當紅外避障傳感器檢測到均布裝置與果面之間的距離達到設定值時,升降裝置電機反轉,垂直輸送裝置上升到一定高度,使果實能繼續進入果箱。升降裝置運行的速度設定為40 mm/s,經計算,TM=8.374 N·m。
2? 控制系統設計
2.1? 控制系統工作原理
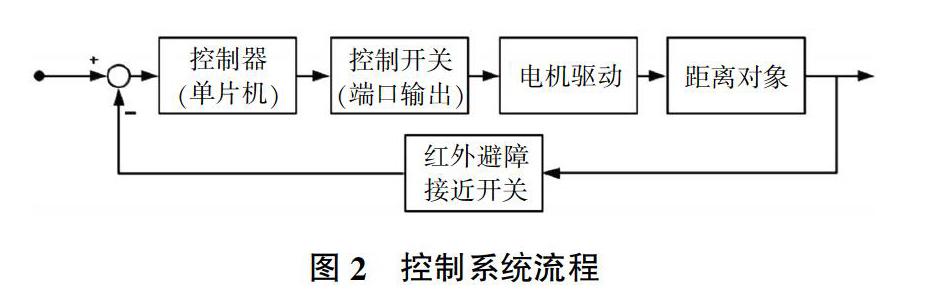
根據果園實際生產需求,箱體為100 cm×100 cm×100 cm立方體,在高于均布葉片20 cm平面增設一個95 cm×95 cm的正方形框架,8個紅外避障傳感器(NPN型)間隔地分布在框架相對的兩條邊上,預先設定傳感器的測定距離,從而檢測未被扇葉遮擋的范圍。當任何一個傳感器被遮擋,傳感器內部都會返回給單片機一個低頻信號。當單片機判斷反饋信號數量滿足設定值時,則認為在這一水平面上蘋果已填充滿,從而判定垂直輸送裝置提升。根據設定的程序,給控制升降裝置的電機相應的信號,電機發動驅動旋轉絲桿帶動均布葉片上升,達到自動控制的效果[4],整體控制系統流程如圖2所示。
2.2? 控制系統硬件設計
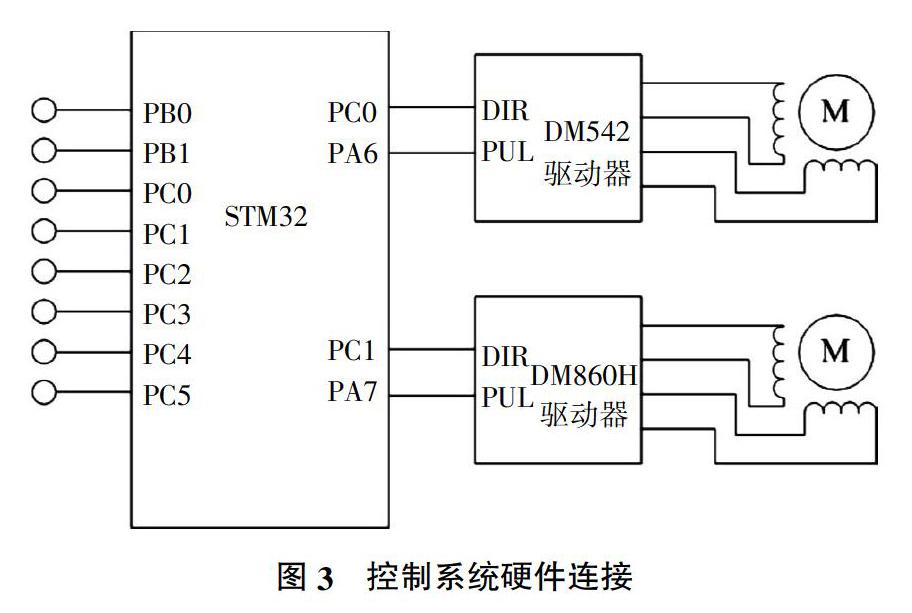
8個紅外避障傳感器與stm32單片機的ADC1的7-15號接口(即PB0、PB1、PC0、PC1、PC2、PC3、PC4、PC5)相連接且這8個紅外避障傳感器由單片機供給5 V電源。當這8個紅外避障傳感器在檢測范圍內被遮擋時會向對應端口發送低電頻信號,單片機通過基于DAM循環模式的ADC通道連續轉換采集功能統計這8個傳感器低電頻個數,當個數大于等于6時表示該層已裝滿,通過PC0和PA6、PC1和PA7這兩組端口連接兩個與不同步進電機相連的DM542驅動器。一組端口是給恒定PWM波驅動步進電機帶動扇葉旋轉;另一組輸出PWM波驅動電機帶動絲桿旋轉[5],如圖3所示。
2.3? 具體模塊及功能分析
2.3.1? 輸入信號模塊? 當8個紅外避障傳感器平均分布在與均布裝置扇葉底端的同一水平面時,組成輸入信號模塊,即能較好地在不增加過多誤判的基礎上,同時滿足經濟性原則和預計設想的要求。
當每個傳感器設定的檢測距離為0.3 m左右時,就能較好地滿足預計設想。每個傳感器由單片機上或者外接直流電源供3.3 V電壓,當前方有蘋果擋住時,輸出指示燈會點亮提示且信號輸出端會通過導線連接輸出一個電頻信號給單片機檢測。
經過對均布試驗的觀測與研究,為避免均布裝置運行對傳感器遮擋的情況,避開均布裝置運行的區域,同時,為了避免出現四個角填充滯后的情況,選取兩個傳感器,針對其中相對的兩個角,用以提高檢測精度,從而提升判定精準度(圖4)。
2.3.2? 控制模塊? 利用stm32單片機ADC的8通道連續轉換采集功能和DAM循環模式,將紅外避障傳感器信號端傳過來的模擬數據循環傳輸到內存中,然后對8個通道數據進行實時判定,單片機通過給舵機驅動一個PWM波,分別控制兩個舵機。一個是固定PWM波,驅動扇葉旋轉的舵機;另一個是設定ADC模式存儲數據作為判定,當在一段極短的時間內捕獲到5個以上低電頻信號時,判定滿足條件跳入中斷,運行給另一個帶動絲桿旋轉的舵機PWM波程序,驅使固定在絲桿上的扇葉均布裝置上升,設定好時間和信號就可以使其上升至固定值。
2.3.3? 動力輸出模塊? 經過機械結構的設計參數分析,最終確定選用一個2.3 N·m小扭矩的步進電機和一個8.5 N·m大扭矩的步進電機作為該模塊的主體,每個步進電機有對應的驅動器,直流電源對驅動器供電,從而驅動電機工作。給步進電機每個繞線組一個變化的電頻信號(PWM波)就可以實現電機的正反轉,信號變化的快慢決定電機的轉速,但如果信號變化過快,轉子無法同步,并且扭矩降低[6]。
小扭矩步進電機固定在扇葉上方,帶動扇葉恒速旋轉,當蘋果下落時,經過均布葉片緩沖,均勻地落入箱體中。電機由24 V直流穩壓電源供電,其轉速由單片機輸出給DM542步進電機驅動模塊的PWM波,驅動模塊上有將轉速細分的開關,通過打開或關閉對應開關,可以達到調節轉速的目的。經過試驗分析,當調節轉速為40 r/min時,蘋果分布較為均勻,且損傷較小。大扭矩步進電機固定在絲桿軸線的正上方,由單片機根據條件判定,使信號對DM860H電機驅動模塊進行控制,從而由絲桿旋轉帶動均布裝置上升。經計算和試驗得到,滿足判定條件后,均布裝置應至少在3 s內完成上升的距離,因此由絲桿和轉速的關系,得出轉速為40 r/min以內。
3? 結論
設計了一種果實智能裝箱設備,能顯著提高果實采收效率,降低勞動強度和果實損傷率,針對蘋果果園提出了果實智能收集、裝箱設備的功能要求和設計參數,確定了裝箱工藝。針對裝箱工藝重點設計了均布裝置,以蘋果為試驗材料,確定了均布裝置合適的工作參數,即均布裝置轉速為40 r/min、均布裝置距果面高度10 cm、均布裝置葉片長度60 cm。確定果實收集、裝箱設備的整體結構和工作原理,對整機的關鍵部件進行了設計,其中包括升降裝置、均布和檢測裝置。通過紅外避障傳感器探測,實現果實的均勻低損傷裝箱,以及箱內每層果實鋪滿時垂直輸送裝置的提升判斷。
參考文獻:
[1] 秦? 楠,王林青.可伸縮式蘋果采摘器的設計[J].機械工程與自動化,2019(3):112-113.
[2] 錢文池,張? 俊,吳紅靜,等.多功能蝶式蘋果采摘器的設計[J].機械研究與應用,2019,32(1):135-140.
[3] 邵? 強,郭曉云,朱紫薇,等.自走式柔性智能蘋果采摘機設計[J].佳木斯大學學報,2019,37(2):247-249.
[4] 丁友強,楊? 麗,張東興,等.玉米變量播種機單體驅動器的設計[J].農業工程學報,2019,35(11):1-9.
[5] 熊利榮,鄭? 偉,羅舒豪.基于觸覺感知的家禽凈膛機械手及其控制系統的設計[J].農業工程學報,2018,34(3):42-48.
[6] 陳立坡.混聯自穩跟蹤平臺及控制系統設計與試驗[J].農業工程學報,2018,34(1):22-27.
猜你喜歡
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年11期)2019-07-04 00:34:48
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年9期)2017-04-17 03:00:53
電子制作(2017年19期)2017-02-02 07:08:27
電子制作(2016年21期)2016-05-17 03:52:51
電子設計工程(2015年15期)2015-02-27 12:07:30
電子設計工程(2015年8期)2015-02-27 12:05:36
