基于LoRa 和EMD 的水聲監測系統設計
2019-09-23 08:09:40姜愉黃美媛通訊作者王明娟梁劍烽鄧宗蓮
電子制作 2019年17期
姜愉,黃美媛(通訊作者),王明娟,梁劍烽,鄧宗蓮
(北部灣大學電子與信息工程學院,廣西欽州,535000)
0 引言
進行水下聲波測量時,經常會檢測到一些時間較短的瞬態信號,如水下生物發出的聲音、發動機聲音、船舶穿過聲、魚類劃水聲、水下爆炸聲、物體入水聲等。這些聲音信號具有豐富的目標特征信息,對于捕魚、生態保護、軍事等方面具備重要參考價值。
由于采用聲吶系統對瞬時信號進行特征提取的方法不夠完善,因此瞬態信號的檢測意義重大。但由于水聲信號源往往處于水源深處,普通的通訊方式很難實現信號傳輸,因此選取一種適合在深水中遠距離無線傳輸的方式尤為重要。水聲換能器具備發生信號和接受信號的功能,適合水下信號采集及定位。在適當位置布置水聲換能器可有效監測水下聲音信號[1]。
LoRa 技術適合遠距離擴頻傳輸,穿透力強,本文采用LoRa 技術設計遠程無線水聲監測系統,并對采集的數據信息使用EMD 分解,提取數據中有用信息作為特征參數。
1 技術原理
1.1 LoRa 通信原理
根據信號傳輸特性公式,低頻信號往往具備更遠的傳播距離并損耗較低。LoRa 通過433MHz 等較低頻段進行通信,通信距離遠大于2.4GHz 通信的ZigBee、BlUetooth 等通信方式,LoRa 在無障礙情況下的直線通信距離可達20KM以上。傳統調制方式包括二進制相移鍵控、頻移鍵控方式傳輸距離在2km 以內。
LoRa采用擴頻通信技術,通過擴頻碼調制,傳輸距離遠,同時具備極強的繞射能力。信息發送采用多頻道傳輸方式,任一信道到達接收端即可實現通信,相對單一信道通信方式更適合在水中傳播。
1.2 EMD 原理
EMD(經驗模態分解)通過選取適當的通過對信號局部極大值和極小值點進行插值的方式形成包絡線,然后計算包絡平均值。通過函數剩余量減去包絡平均值獲取各個分量,直至剩余函數中極值點個數小于等于兩個分解結束。
EMD(經驗模態分解)分解原始信號為符合極點值與過零點值數量差別小于1 和局部最大值和局部最小值產生的上下包絡線的平均值為0 的窄帶分量。EMD(經驗模態分解)分解的各個分量含有不同的頻率特征和特征尺度,對各個分量通過選取適當的IMF(固有模態函數),可實現去噪重構。對各個頻率分量采用希爾伯特變換可實現瞬時屬性參數的獲取,這也是著名的希爾伯特黃變換的實現方式。其核心公示:
其中 x (t )為原始信號, ci(t )為本證模函數, rn(t )為剩余分量。
2 硬件設計
水聲監測采集系統分為上位機、LoRa 網關和水聲采集節點三部分構成。水聲采集節點包括水聲傳感器、單片機、存儲器和GPS 模塊及LoRa 無線傳感模塊構成;網關包括單片機、存儲器、LoRa 無線傳感模塊及串口構成。水聲采集節點通過水聲換能器采集水聲數據,數據經濾波放大后進入單片機,單片機通過LoRa 無線傳感網絡轉發至LoRa 節點,節點通過LoRa 無線傳感網絡發送至LoRa 網關,LoRa網關收集多節點數據后通過RS485 總線發送給上位機,上位機對水聲數據處理及發送采集命令[2]。如圖1 硬件架構圖所示,水聲采集節點通過LoRa 無線傳感網絡與LoRa 網關通訊,LoRa 網關通過RS485 與上位機通訊。
設計中所用單片機選取可外置存儲器STM32F205、LoRa 通訊模塊采用可串口透穿的SX1262 芯片、GPS 定位模塊選擇SKG09A、電源模塊采用鋰電池供電。
2.1 微控制器
考慮存儲數據量的問題及水下功耗較低等要求,采用可外置存儲器的單片機STM32F205。該MCU 高集成度,集成1MB Flash 存儲器、128KB SRAM、以太網MAC、USB2.0HS OTG、照相機接口、硬件加密支持和外部存儲器接口[3]。
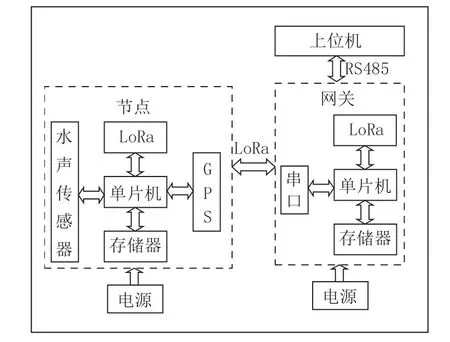
圖1 水聲采集系統硬件架構圖
2.2 LoRa
水下信號干擾較強,另受水深影響,需選取傳輸能力較強的工業級芯片。設計采Hope Microelectronics 公司的RFM95 芯片作為LoRa 無線傳感模塊[4],采用擴頻通信技術,基于ALOHA協議,采用異步方式,根據應用場景睡眠和工作,功耗極低[9]。其在無干擾情況下直線傳輸距離可達8KM,發射功率可達10W。
2.3 GPS 定位
GPS定位模塊主要用于提供聲音采集裝置的具體位置,系統工作時將具體位置傳輸給LoRa 網關,LoRa 網關再將位置信息傳輸到控制端,為更換電池和更換采集裝置的位置提供支持。GPS 定位模塊選擇SKG09A 定位模塊,該模塊集成RF 射頻芯片、基帶芯片和核心CPU 及相關外圍電路,該模塊具有功耗低和靈敏度高的特點[5],適合在水下空間準確定位。本模塊通過2、3 引腳首發數據,外圍電路設計如圖2 所示。
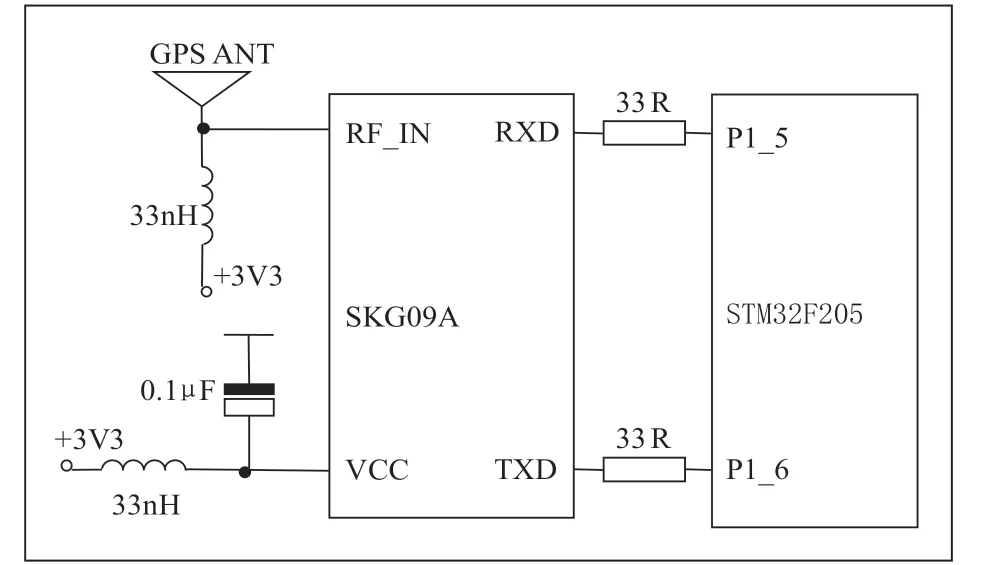
圖2 GPS 外圍電路連接圖
2.4 其他硬件
水聲換能器選擇安布雷拉DYW-500-E,遵守GB/T3223-94 標準,其工作頻率范圍是頻率:500kHz±7.5kHz,可達100m 水深壓力。滿足自由場電壓靈敏度高、發送電流電壓響應強、指向性強的要求[6]。
單片機和LoRa 模塊的電源采用3.7V 鋰電池降壓供電,GPS 定位模塊和水聲換能器采用鋰電池升壓供電。
封裝材料需具備密封性強和信號傳輸干擾性弱的特點,選取朔料材料密閉封裝,朔料材料對信號傳輸影響較小,容易封裝,且處理方便[9]。
3 軟件設計
軟件開發采用IAR Embedded Workbench 開發工具,IAR Embedded Workbench 具備完整的交叉編譯器和調試器,提供直觀用戶界面,適合各類嵌入式開發使用[10]。軟件部分主要包括水聲采集節點工作流程、網關工作流程、上位機工作流程三部分組成。
3.1 LoRa 網關工作流程
LoRa 網關的首先進行初始化,然后與上位機建立連接,根據上位機命令組建網絡,根據節點請求允許節點加入網絡。對節點發送的數據進行接收并對信息進行解調,將解調后的數據統一格式發送至上位機。
3.2 水聲采集節點工作流程
水聲采集節點的工作主要是發現LoRa 網絡后向LoRa網關發送加入請求,根據網關命令采集水聲信息并發送給LoRa 網關,發送信息后如無結束命令則繼續采集[11]。整個采集過程需在水聲環境平穩下根據傳播距離測試,確保實驗環境的穩定性。測試其軟件工作流程如圖3 所示。
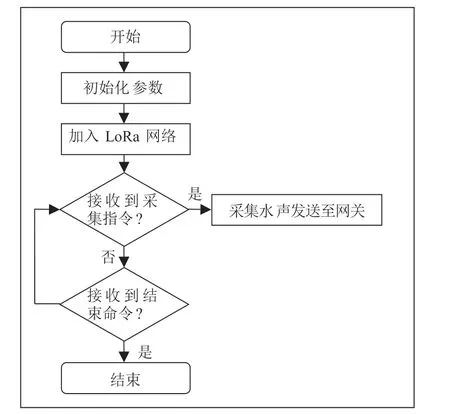
圖3 節點軟件流程圖
3.3 上位機工作流程
上位機主要負責發送采集指令及接受LoRa 網關傳輸回來的水聲信息,采用EMD 算法按頻率特征分解水聲數據,根據各層信息作為特征參數進行數據分析,達到提取水下瞬態信號特征參數的目的[12]。
4 結語
本文提供了一種基于無線技術LoRa 的水下遠程聲音信息采集系統的設計方案,本方案可用于水下目標監測、水下野生保護動物聲音監測等領域。可為水下作業、水下爆破和機器人水下打撈等提供輔助功能,具有較好的參考價值。
本文的后續研究主要針對水下信道傳輸、不同水下環境噪聲的去噪處理,以及結合水聲換能器特性和布局的水下目標定位[13]。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國生殖健康(2019年3期)2019-02-01 06:12:26
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
