液壓支架數據動態優先級調度策略分析
2019-09-23 02:37:24吳奶明
山西焦煤科技 2019年7期
吳奶明
(西山煤電集團 東曲礦, 山西 古交 030200)
液壓支架分布于整個綜采工作面,用于支撐工作面頂板,避免發生煤層坍塌事故,為綜采工作面的采煤機、刮板輸送機以及操作人員提供安全作業空間,是煤礦井下不可或缺的支護設備[1-2]. 液壓支架電液控制系統是液壓支架的核心,現有的液壓支架電液控制系統實時性差、可靠性低。綜采工作面作業長度為80~300 m,所需液壓支架數量較多,液壓支架的動作與采煤機的位置相關,位于采煤機后方的液壓支架需要及時、準確地完成推溜、支護頂板的操作。液壓支架在綜采工作面的鋪設距離較長,每一臺液壓支架都安裝有一個控制器,以實現鄰架控制、成組控制等操作[3]. 針對采用CAN通信協議實現的液壓支架控制系統,為避免在同一時刻多人同時操作液壓支架而產生的CAN通信指令碰撞和擁堵,設計并實現基于CAN通信的動態優先級調度策略,保證液壓支架控制的安全、穩定、及時、有效。
1 CAN通信協議介紹
CAN是國際標準化的串行通信協議,其本質上是一個廣播類型的總線,具有多主競爭、多主站運行、分散仲裁、廣播通信的特點,可實現多點監聽,多點控制。CAN通信網絡中的任意節點可以在任意時刻主動向網絡中的其他任意節點發送信息。CAN通信協議的數據幀格式見圖1,包括幀起始、仲裁段、控制段、數據段、CRC段、ACK段以及幀結束。仲裁段表示該數據幀的優先級,優先級高的數據幀優先發送[4-5]. 由CAN通信的特點可知,如果總線上同一時刻有多個節點發送CAN通信信息時,由于優先級的存在,可能會造成某一CAN通信信息的延時發送,甚至是無限延時發送。在綜采工作面的液壓支架控制系統中,這種情況是不允許發生的,否則會出現安全事故。

圖1 CAN通信協議數據幀格式圖
2 動態優先級調度策略
2.1 現有液壓支架CAN通信問題
應用CAN通信特點,現有液壓支架控制器采用CAN通信協議,實現了綜采工作面全部液壓支架的聯動控制。液壓支架電液控制系統之間的控制指令由CAN通信發送,主要有鄰架控制、成組控制、急停閉鎖控制以及遠程控制指令。上述指令都是非周期發送的,優先級從高到低依次為急停閉鎖控制指令、鄰架控制指令、成組控制指令以及遠程控制指令。在進行液壓支架控制時,如果在同一時間內綜采工作面上有多人同時對液壓支架進行操作,會出現CAN通信網絡中的多個節點,同時向CAN總線發送信息,使得信息在CAN總線上發生碰撞和擁堵[6]. CAN通信信息發生碰撞和擁堵后,按照CAN通信協議幀格式中的仲裁字段,以優先級從高到低次序依次發送。優先級較低的信息延遲發送,降低液壓系統的實時性。CAN通信數據處理流程見圖2,CAN接收中斷到達后,將接收到的CAN通信信息存入接收緩沖區,如果CAN接收緩沖區已滿,則調用CAN通信協議解析器對接收到的信息進行解析。如果接收到急停閉鎖信息,則對該信息直接進行處理。如果CAN發送緩沖區已滿,則更新系統狀態,發送并清空緩沖區數據。

圖2 CAN通信數據處理流程圖
2.2 動態優先級調度策略
針對現有液壓支架CAN通信機制存在的問題,引入動態優先級調度策略。對CAN通信協議數據幀格式中的仲裁段,即標準幀格式中的ID28-ID18 11個bit位進行重新設計,見表1. 其中,ID28-ID26三個bit位為CAN通信信息的優先級位,二進制數值越低,優先級越高,即0×000的優先級最高,0×111的優先級最低。ID25-ID18 表示該綜采工作面液壓支架的編號,編號原則為采煤機運行方向,從0—255依次編號。如表1所示,“急停閉鎖”的優先級為0×000,為最高優先級,“遠程控制”的優先級為0×111,為最低優先級。當在CAN通信總線中只要存在“急停閉鎖”信息,其他信息的發送就會被無限期的延后。

表1 動態優先級調度算法CAN通信協議仲裁段設計表
引入動態優先級調度算法,即設定當前CAN通信信息infox的優先級為α,該信息仲裁失敗后,其優先級進行動態調整,調整原則為:
α′=α-n|α>1
(1)
其中,α為該CAN通信信息的原優先級,α′為該CAN通信信息更新后的優先級,n為該CAN通信信息仲裁失敗次數,且α>1. CAN通信信息的優先級在動態升級過程中,不能超越急停閉鎖的優先級,即急停閉鎖的優先級始終是最高的。另外,為保證液壓支架控制系統的實時性,定義CAN通信信息在規定時間內仍然沒有發送出去,則直接將該CAN通信信息的優先級設置為1. CAN通信信息的動態優先級調度算法見圖3,首先將等待發送的信息賦予初始優先級α,如果該信息發送不成功,則按照式(1)規則動態提升優先級,如果在規定時間T內,該信息仍沒有發送出去,則直接將該信息的優先級置為1,以保證信息按時發送,確保液壓支架控制的實時性。

圖3 動態優先級調度算法流程圖
對液壓支架進行控制的運行參數保存在端頭控制器的外部存儲器中,存儲形式為控制指令+支架號+前立柱壓力+后立柱壓力+推溜位移+伸縮壓力+狀態位,見表2. 其中,狀態位占一個字節,可表示8個狀態標志,有間架控制器急停、閉鎖狀態、推溜到位狀態、壓力(前立柱壓力、后立柱壓力、伸壓力、縮壓力)正常狀態等,見表3,為對支架0×1C進行鄰架控制,控制后前立柱壓力為0×3C,后立柱壓力為0×17,推溜位移和伸縮壓力都為0,狀態位都為0,狀態正常。
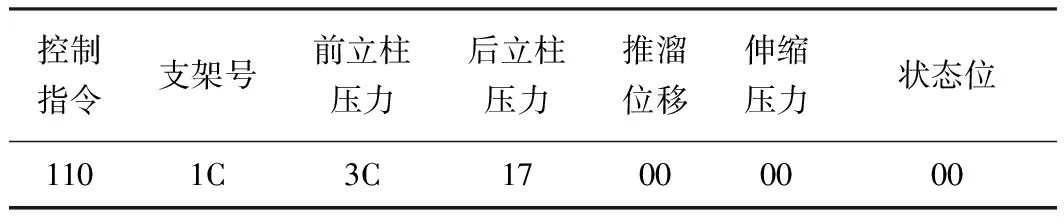
表2 CAN通信動態優先級調度策略數據保存格式表
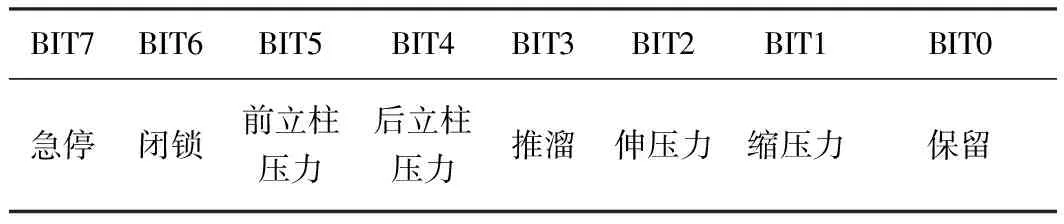
表3 狀態位位定義表
3 實驗室驗證
在實驗室設計4組實驗,驗證所設計的液壓支架CAN通信動態優先級調度策略。
設計實驗1:驗證動態優先級調度策略中的鄰架控制,液壓支架控制器1通過CAN通信對液壓支架控制器2進行鄰架控制,并進行顯示。實驗結果見表4.

表4 鄰架控制指令內容表
設計實驗2:驗證動態優先級調度策略中的遠程控制,操作上位機,通過液壓支架控制1控制液壓支架控制器2進行遠程控制,并進行顯示。實驗結果見表5.
設計實驗3:驗證動態優先級調度策略中的急停控制,液壓支架控制器1對液壓支架控制器2進行急停控制,同時,液壓支架控制3對液壓支架控制2進行升前立柱控制,運行存儲結果見表4,控制指令為急停000,狀態位為80.
設計實驗4:驗證動態優先級調度策略中的成組控制,對編號為1C-21的液壓支架進行成組升前立柱控制,運行后的存儲結果見表5. 表5所示為完成支架號為1C-21升前立柱的動作控制,且狀態位都為00,狀態正常。

表5 遠程控制指令內容表
4 結 論
本文提出了一種基于液壓支架數據傳輸的CAN通信動態優先級調度策略。根據實際工況,對發送的CAN通信信息進行優先級動態調整,保證了液壓支架控制的實時性和準確性。同時,維持液壓支架“急停閉鎖”動作優先級最高,確保液壓支架安全、穩定。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
中華手工(2017年2期)2017-06-06 23:00:31
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
中外會展(2014年4期)2014-11-27 07:46:46
航天器工程(2014年5期)2014-03-11 16:35:55
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
