盾構法施工過程中隧道軸線復測技術路線設計
2019-09-24 07:03:02唐萬銀
資源導刊(信息化測繪) 2019年8期
唐萬銀
(上海市巖土工程檢測中心,上海 200436)
1 引言
隨著城市發展,軌道交通作為公共交通的重要組成部分,在緩解城市交通擁堵、優化城市發展布局、改善城市環境等方面發揮了巨大作用。大力發展軌道交通事業,已成為社會共識。盾構法因其施工效率高、環境危害小等優點,目前廣泛應用于地鐵隧道施工。軸線復測作為隧道軸線檢測的一種手段,可及時為施工方提供隧道與設計軸線的偏差值,指導施工方及時調整盾構姿態,確保盾構施工順利進洞及貫通。
2 軸線復測的工作內容及復測頻率設計
要有效控制盾構掘進過程中隧道區間的控制點和隧道軸線中心、高程的偏離情況,確保盾構沿設計軸線推進,保障關鍵工序施工安全,軸線復測的主要工作內容及頻率設計如表1 所示。

表1 軸線復測的工作內容及頻率設計
3 軸線復測的技術路線設計
軸線復測項目組進場后,即可進行首級控制點的復測及地鐵保護區內線路巡查,完成后提交首級控制點復測成果報告及線路巡查報告。按照軸線復測各項檢測工作的順序、工作特性及復測要求,在接到復測申請后,兩天內完成外業測量工作,檢測合格次日提交報表。若有超限數據,經重新測量仍超限的,上報業主及施工方。軸線復測工作流程如圖1 所示。
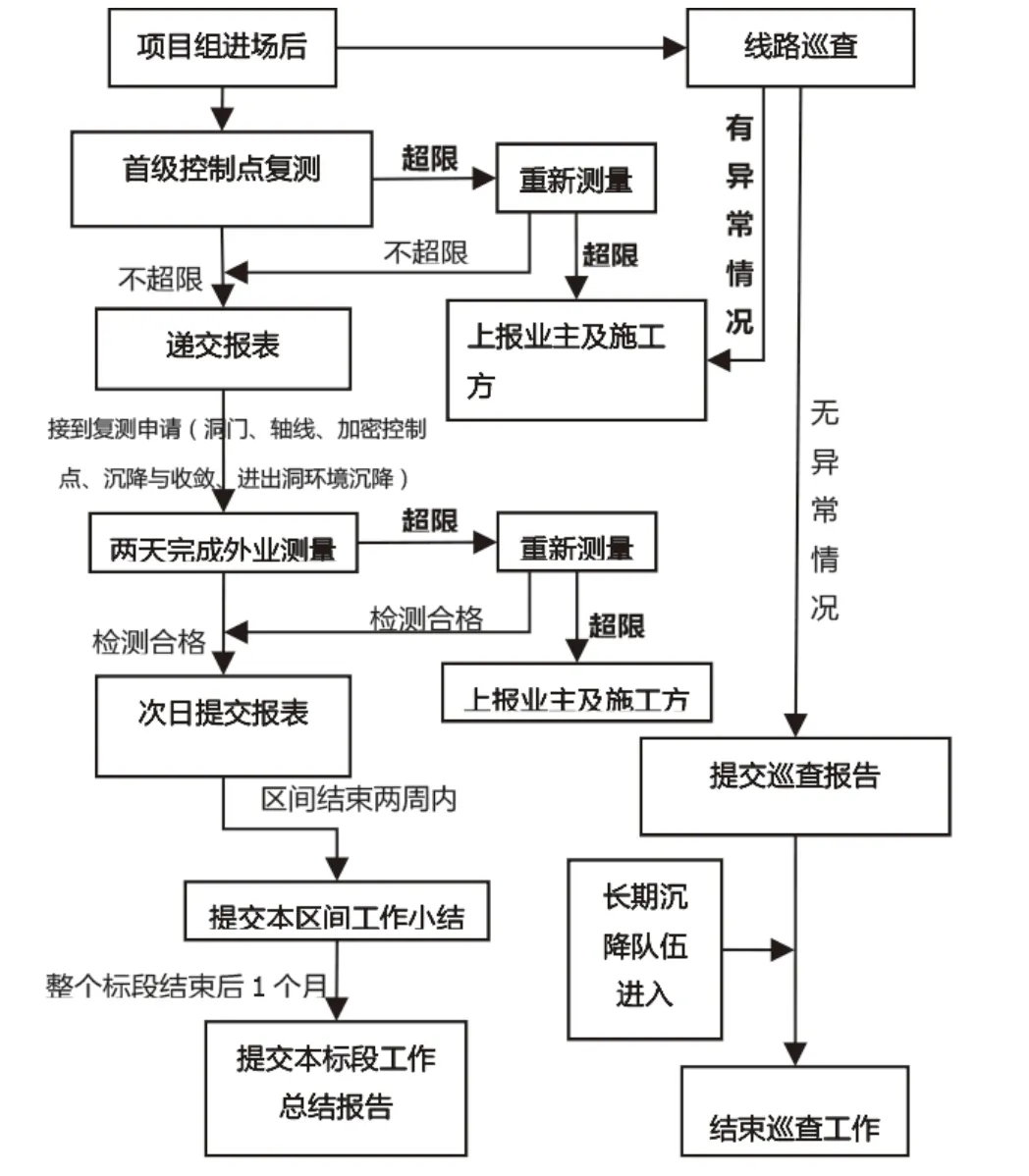
圖1 軸線復測工作流程
3.1 軸線復測技術方法設計
3.1.1 首級控制點復測
首級平面控制點復測分別測量前后相鄰空導點間夾角和前后兩相鄰點間距離;首級高程控制點復測測量位于盾構施工區間兩側車站附近的水準點,檢核其高差。平面和高程控制點提交的成果等級分別為四等導線[1]和二等水準[2]。首級平面控制復測技術要按照《工程測量規范》(GB 50026—2007)四等導線并在測距指標等方面偏高要求設計;野外水準測量觀測作業遵照《國家一、二等水準測量規范》(GB/T 12897—2006)中有關二等水準的規定執行。
3.1.2 加密控制點復測
隧道內加密控制點復測,含井上井下聯系測量,從地面控制點向地下傳遞坐標、方向和高程,通過洞門從地面向近井點引測坐標和方向的趨近測量,可采用趨近導線或邊角三角形。
(1)趨近導線法
如圖2 所示,KD1、KD2、KD3 是首級空導點,以相鄰兩個空導點作為起算點,利用導線觀測方法將坐標和方位引測至隧道內。如果區間隧道位于KD2、KD1之間,即使KD3 同樣滿足起算點精度要求,復測時仍選KD2、KD1 作為該區間起算點,這樣有利于消除相鄰點位誤差,保證區間隧道相對位置準確,提高貫通精度。
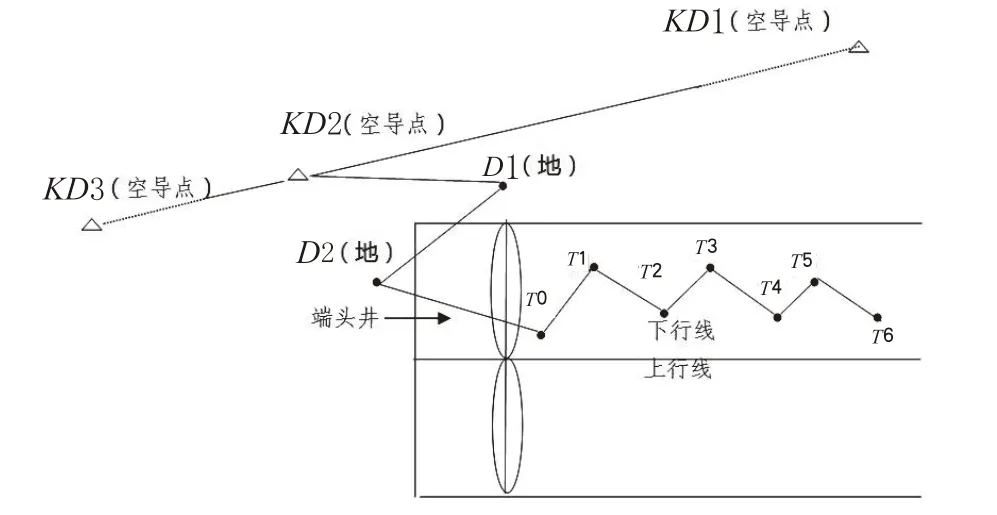
圖2 導線法示意圖
(2)聯系三角形法
聯系三角形法一般用于井口比較狹窄,無法進行趨近導線觀測的情況。要確保聯系測量的精度,井上、井下聯系三角形需滿足下列要求:兩懸吊鋼絲間距不小于5m ;定向角α(包括井上和井下)均小于3°;a/c 及a′/c′的比值小于1.5 倍[3],如圖3 所示。
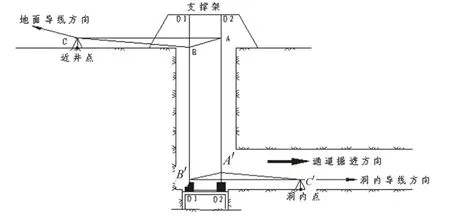
圖3 聯系三角形法示意圖
3.1.3 洞門復測
洞門中心(平面、高程)按盾構推進設計圖紙進行復測較差比較。洞門復測的方法主要有空間圓擬合法與三維激光掃描法兩種。
(1)空間圓擬合法
現場實測洞門鋼圈內邊沿的三維坐標,盡量保證測點均勻分布,內業利用隧道精靈軟件進行空間圓擬合處理,擬合出鋼圈洞門的中心三維坐標[4]。擬合數據成果如圖4 所示。
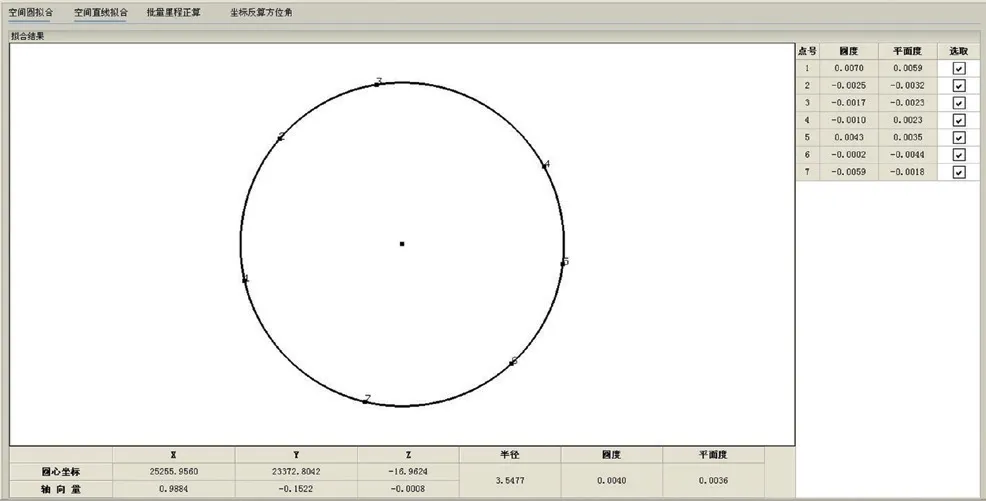
圖4 空間圓擬合成果數據
(2)三維激光掃描法
外業采用徠卡P40 三維激光掃描儀進行洞門點云數據采集,內業采用Cyclone 軟件,通過對點云數據的處理,經過配準、去噪、切割、抽稀、切片等技術處理,獲取所需點云數據,然后根據點云數據建立洞門的三維模型,在三維模型上可直接量測出洞門中心的三維坐標[5]。洞門三維點云模型如圖5 所示。
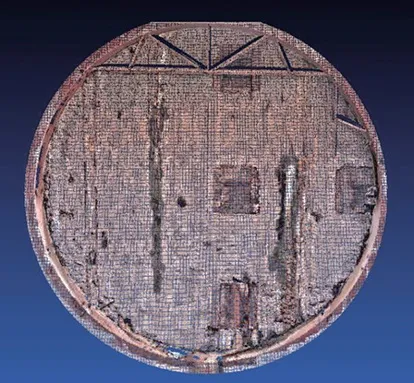
圖5 洞門的三維點云模型
3.1.4 隧道軸線復測
通過測量成型盾構環片的中心三維坐標,計算出與設計軸線的三維偏差,檢查施工質量,指導施工方實時調整盾構姿態。軸線復測方法主要有五米橫尺法、空間圓擬合法與三維激光掃描法三種。
(1)五米橫尺法
用定制的帶長水準氣泡并中心帶棱鏡的5m 鋁合金尺水平橫置于環片兩端(用水平尺控制其水平度),將棱鏡放置于尺中心刻畫點,全站儀照準棱鏡中心,測量其坐標,即為該環片的幾何中心坐標;將5m 鋁合金塔尺分別正、倒立于同一環片前端底、頂處,用水準儀讀取塔尺上兩個數據,將兩個數據相加即為豎徑,環片底部標高加上豎徑的一半,即為環片的中心標高。
(2)空間圓擬合法
利用全站儀觀測環片上同一斷面上的測點,測點應大致均勻分布于整環,內業通過空間圓擬合法擬合其圓心的三維坐標,方法同洞門復測的空間圓擬合。
(3)三維激光掃描法
技術方法同洞門復測,通過建立隧道的三維模型,能直觀地看出隧道軸線的偏離值。
3.1.5 隧道沉降和收斂監測
隧道沉降主要采用二等水準觀測方法,復測點可采用中視法觀測;管片收斂監測主要采用固定測線法和全斷面掃描法。
(1)固定測線法
采用手持測距儀觀測,測距儀應分別對中、瞄準固定測線的兩個端點,每條測線應獨立進行3 次讀數,互差不大于±2mm,取均值作為本次觀測成果。
(2)全斷面掃描法
在隧道環片道床中間位置設置架站基準點S,以垂直于環片的豎向平面作為監測斷面,兩側環片(或中間隔墻)下部設置定向點A、B。以儀器中心在地面的投影為原點,在儀器望遠鏡所掃過的平面內建立直角坐標系,以橫斷面上每個測點的相對測量原點的x、y 坐標擬合圓曲線,與隧道設計橫斷面形狀相比較,計算包括水平直徑在內的全斷面數據。全斷面掃描示意圖如圖6 所示。
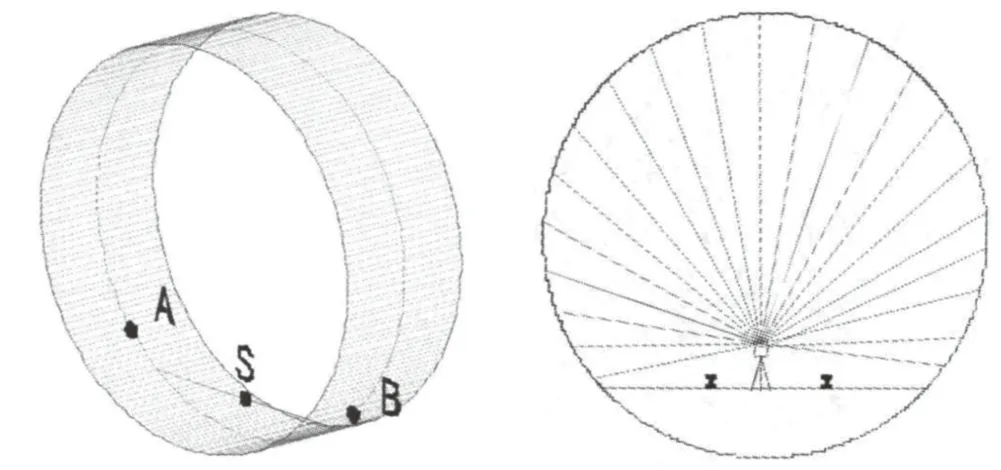
圖6 全斷面掃描示意圖
3.1.6 關鍵工序施工監測抽測
對關鍵工序施工監測進行抽測,確保監測資料能真實反映復測對象的變化情況,保障關鍵工序施工安全,主要技術方法為沉降監測和收斂監測。
3.2 軸線復測限差設計
軸線復測限差設計如表2 所示,復測值與限差值比較,若超出報警界限值或有突發情況,現場復測人員在檢查確認復測數據的準確性后,應立即與項目復測負責人聯系,判斷可能存在的險情特征,對報警后的相應復測點實施重點復測,適當增加復測頻率,觀察沉降與發展趨勢。
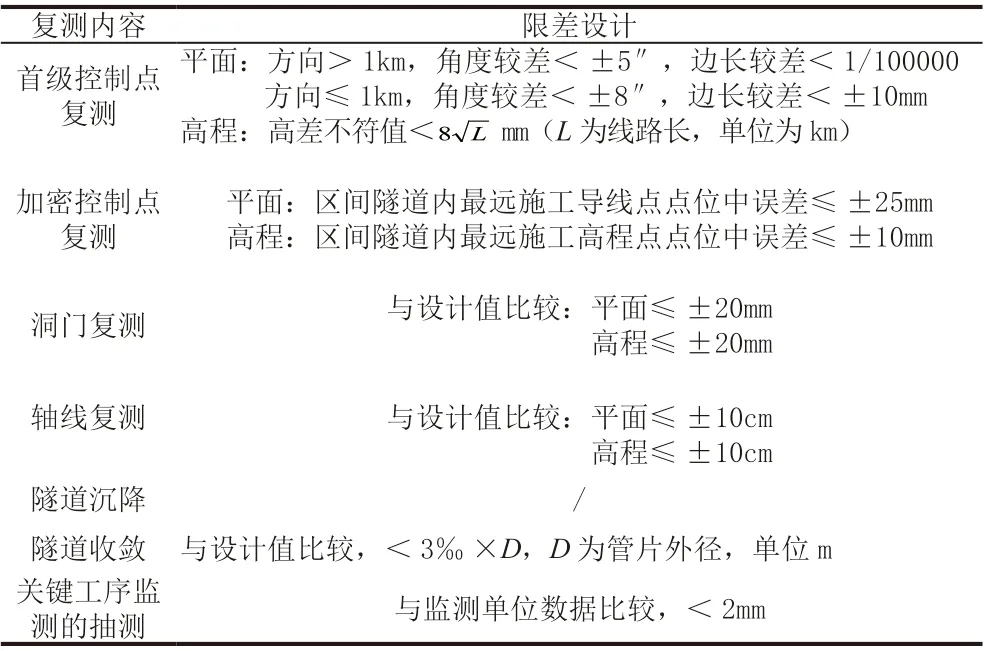
表2 軸線復測限差設計
3.3 軸線復測成果提交
軸線復測工作貫穿整個盾構施工時段,根據各測項的時間、工序、內容等,及時提交相應的中間成果報表,區間貫通后提交貫通總結報告。中間成果報表包括:(1)首級控制點復測成果報表;(2)加密控制點復測成果報表;(3)洞門復測成果報表;(4)隧道軸線偏移值成果報表;(5)隧道沉降、收斂成果報表;(6)關鍵工序監測的抽測成果報表;(7)巡查報表。
4 結束語
軸線復測是盾構法施工過程中必不可少的一項內容,是指導信息化施工的一種方式,是保障盾構安全、準確推進的強有力手段。隨著城市軌道交通項目的大力開展,軸線復測的重要性日益凸顯。本文針對上海地區地鐵隧道施工中軸線復測工作進行技術路線設計,可為其他盾構法隧道施工軸線復測提供參考。
猜你喜歡
建材發展導向(2022年10期)2022-07-28 03:04:36
建材發展導向(2021年18期)2021-11-05 09:19:50
建材發展導向(2021年9期)2021-07-16 07:11:36
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國房地產業(2016年2期)2016-03-01 01:25:48
河南電力(2016年5期)2016-02-06 02:11:34
