點云與光譜影像產品在森林資源普查中的應用
2019-09-24 07:03:02王義張昊瓊趙守杰
資源導刊(信息化測繪) 2019年8期
王義 張昊瓊 趙守杰
(1.河南省金地遙感測繪技術有限公司,河南 鄭州 450003;2.河南省遙感測繪院,河南 鄭州 450003)
1 引言
近年來,光學遙感利用衛星影像與航空照片補充替代傳統的森林資源普查,獲取大區域森林生態、環境、氣候信息和生長因子。雖然光學遙感技術無法獲取林木三維結構參數,但激光雷達遙感技術可有效穿透森林,獲取三維結構參數。傳統的森林普查信息采集困難,無法獲取林木結構信息及空間位置,測量結果真實性差。而通過高精度激光雷達掃描,可提取點云數據中的森林參數和統計變量,包括林木高度、反射強度、郁閉度、密度大小、葉面積指數等。根據參數反演森林蓄積量、覆蓋率和間隙情況,分辨樹木年齡、種類、數量,依據森林地面DEM,實現森林單木分割,自動提取林木結構參數。本文通過介紹機載LiDAR 與光學遙感技術,分析點云及影像數據在森林資源普查中的應用,旨在提供一種快速、高效的作業方法。
2 激光點云在森林普查中的應用
2.1 點云數據獲取
激光雷達的主要工作原理為發射激光束對目標物的距離和角度進行量測。根據激光在空氣中的傳播速度,記錄激光脈沖從發射到到達目標反射物的時間,計算出激光器到反射物的距離,同時利用角度編碼器記錄每一束激光脈沖的角度。激光雷達可以瞬間發射多束激光脈沖,借此可精確計算出樹木的高度、位置、樹冠、樹木邊界等,構建真實三維模型,探測地面真實地形。機載LiDAR 獲取和林木處理流程如圖1 所示。
2.2 分塊抽稀
利用機載LiDAR 數據獲取樣地中的點云數據,對數據進行處理分析,將飛行數據進行分塊處理。由于單木提取需要大量點云數據,高密度的點云不一定能夠提高單木提取的精度。因此,需要對數據進行抽稀處理。根據點云數據可直接量測樹高(如圖2 所示)。
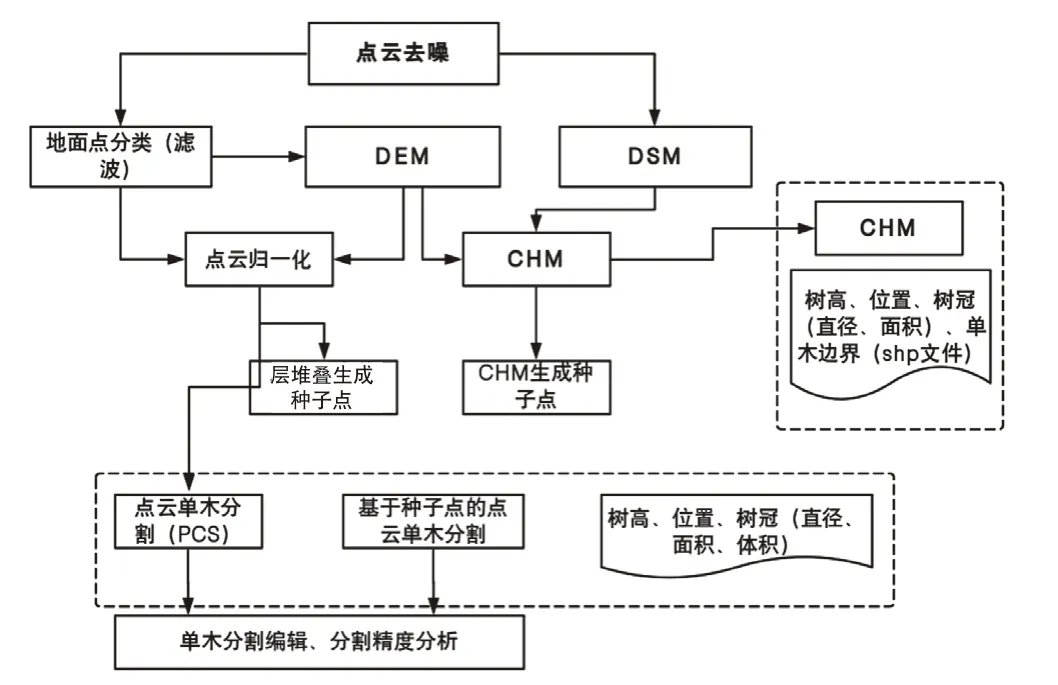
圖1 Lidar點云獲取處理流程
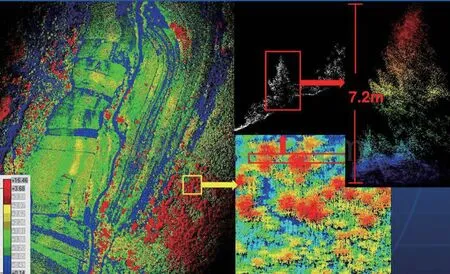
圖2 點云數據采集成果
2.3 粗差識別剔除與點云濾波
激光雷達點云一般存在粗差,對后續的點云處理和信息提取有負面影響,需要進行粗差的識別和剔除。地面點粗差剔除一般采用高程插值,由于點云數據量大,可進行分批處理。對LAS文件采用相同的濾波參數,識別地面點數據后生成測區的數字高程模型。本文利用商業化點云處理軟件Terrasolid 插件功能完成。
3 光譜影像在森林資源普查中的應用
3.1 多光譜影像對林地與非林地的判讀
多光譜影像可判讀物種信息,選取不同目標對象獲取相應光譜,植被光譜在680nm 以后分反射率會提高,非植被的紅邊效應與真實植被的紅邊效應有很大差別。對可見近紅外波段的數據進行處理,利用歸一化植被指數和紅邊歸一化植被指數區分識別目標物。
RGB、CIR 和NIR 多光譜影像數據如圖3 所示。標準假彩色合成(CIR)波段影像的獲取主要是通過RGB影像和NIR 影像數據相互融合,采取近紅外波段與RGB 影像中的紅波段和綠波段,主要用于植被、濕地監測,也可區分部分植被的種類。通過CIR 影像可以區分針葉林、闊葉林、草地,以及建筑、耕地、水系等。CIR 影像對林地和非林地的判讀如圖4 所示。

圖3 RGB、CIR和NIR多光譜影像數據
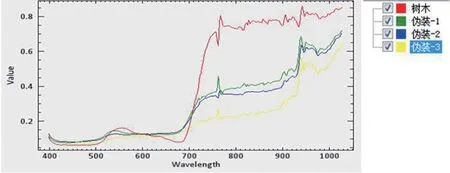
圖4 CIR影像對林地和非林地的判讀
3.2 高光譜影像對樹種的判讀和植被類型的區分
數字遙感影像只能根據顏色簡單地將樹種區分為針葉林和闊葉林,光學影像受光照影響,相同樹種可能顯示出不同光譜信息。然而,高光譜影像處理后,根據高光譜分辨率和大量光譜波段獲取不同地類的光譜曲線,建立樹種光譜數據庫,可提高識別和分類精度,清晰判讀出建筑物、林地、耕地、水系等的特征,辨別各種物體的細微光譜差異,然后根據不同介質的波段反射對相同地類的種類進行區分,如楊樹、樟樹、松樹等植被種類(如圖5 所示)。
3.3 全色彩影像數據的應用
通過正射影像,根據針葉林及闊葉林的樹冠和樹干進行數量統計。根據影像判讀,對變色樹、異常林地進行精確定位,采集有效的影像資料,輔助判斷森林健康等級,還可清晰看出樹木病蟲害及受損林地范圍、面積、程度。影像病蟲害解譯如圖6 所示。
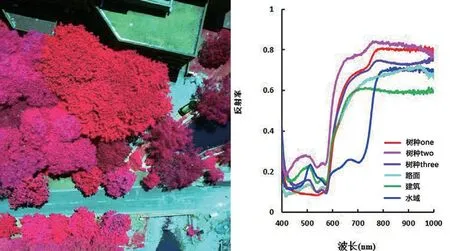
圖5 高光譜曲線對林木種類的判讀

圖6 病蟲害解譯
通過全色彩影像可以清晰看到森林中的亂砍濫伐現象,精準獲取盜伐濫伐的面積、株樹,為執法人員提供有力證據,便于執法人員前往實地執法。全色彩影像及實地核查結果如圖7 所示。

圖7 全色彩影像及實地核查
4 點云與光譜影像在植被信息統計中的應用
通過機載LiDAR 及多光譜相機獲取的成果數據對比,分析出森林經營區劃和林地小斑區劃界限,各類面積及權屬、森林類別等管理屬性,非林地上森林、人工造林、未成林的面積及其權屬、森林類別等管理屬性,林木資源株樹、蓄積,自然地理環境和生態環境,調查森林經營條件、措施與成效。點云數據及多光譜影像數據同步獲取的成果如圖8 所示。
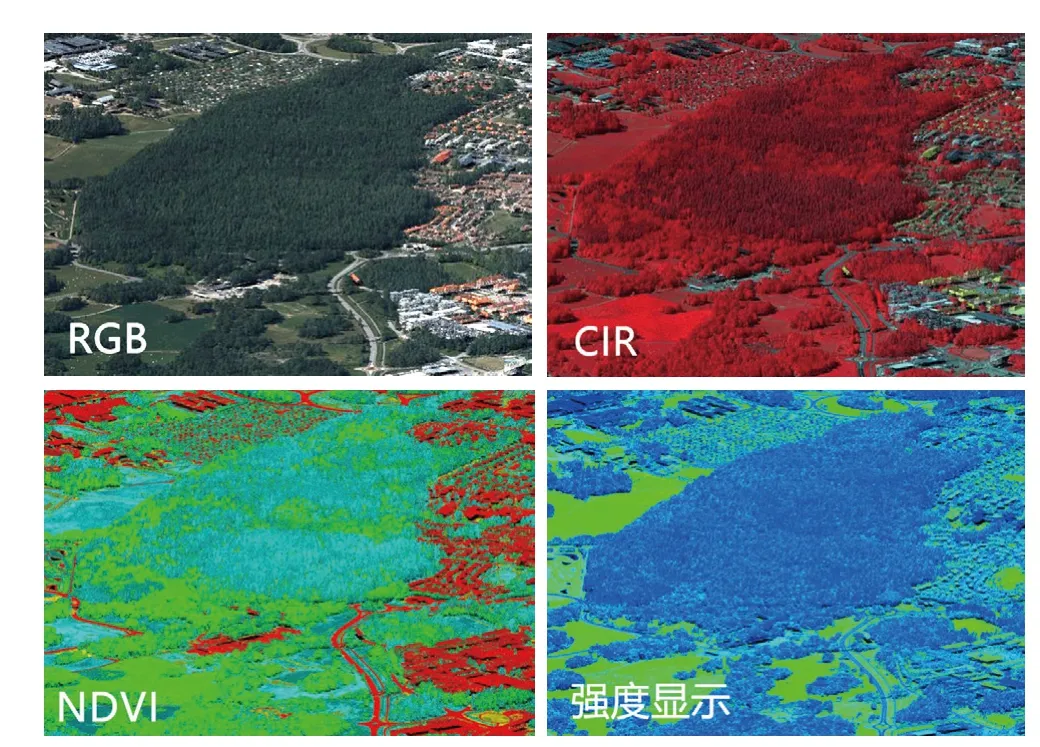
圖8 多波段影像與點云數據
4.1 點云著色及紋理映射
高精度、高密度、精準表達三維地物是點云數據的特點,但是缺乏色彩信息無法對林地進行準確判斷。通過多波段影像對點云數據進行色彩紋理映射,點云數據和影像數據轉化在同一坐標系下,即賦予點云真實色值(RGB),實現真色彩點云可視化三維模型。點云著色有兩種:一種是相機標定;一種是通過點云和影像,利用反射率圖像和強度信息進行紋理匹配。相機標定直接利用線性變換將紋理圖像與點云進行匹配,具體方法為:同名點選擇、根據DLT 建立點云及影像像素的幾何對應關系,求出點云中所有點與影像中的像素對應值,得到具有顏色真實感的三維模型[1]。著色后的點云主要應用于去噪后點云分類檢查使用,如高壓線、通信塔等非植被數據分類是否準確。
點云數據著色后,由于點云數據具有離散性,并非結構化數據,一般情況下需要對點云數據構建TIN三角網,然后通過紋理映射,使其富有質感,更接近真實場景。LiDAR360 中點云工具插件中的紋理映射功能可以實現。點云數據根據RGB 顏色顯示后,可得到接近影像數據的點云數據(如圖9 所示)。

圖9 紋理映射后的點云數據
4.2 單木分割法
單木分割法分歸一化點云單木分割和CHM 單木分割兩種。點云單木分割是基于地面點云歸一化算法,點云數據經過地面點分類后獲取DEM,去除地表模型起伏對植被點云高程的影響。其原理是將植被點云Z值減去至貼近地面高程值。點云單木分割法是將樹木單株分別顯示得出。PCS 算法基本原理如圖10 所示。
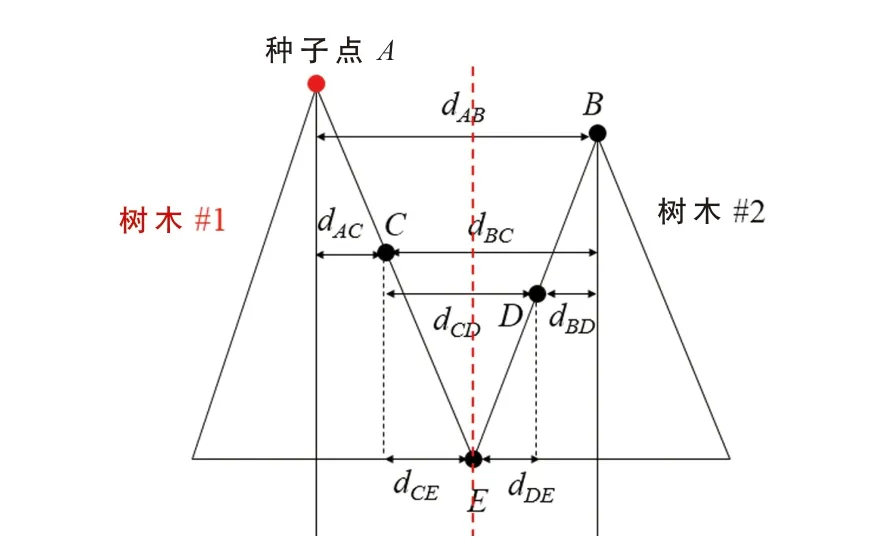
圖10 PCS算法基本原理圖
種子點A 為最高點即樹高點,是待分割的點,dAB、dAC、dBC、dBD、dCE、dDE分別表示兩點間的距離。PCS 算法原理可以簡單描述為當目標點(B、C、D、E)到已分出樹A 中所有點的二維投影最小值大于設定閾值d(2D 歐式距離)時,則認為目標點屬于另一棵樹B;如果閾值小于d 且到目標點的距離小于到B 的距離,則認為目標點屬于樹A,否則屬于樹B[2]。
分水嶺分割算法為CHM 分割,基于CHM 柵格的單木分割就是一種基于柵格圖像的分割方法,所以基于CHM 的單木分割方法可以視作針對灰度圖像的處理技術,其中典型算法有注水算法、分水嶺分割算法等,亮度高點為山峰,陰暗面為山谷。假如用水填充并建立屏障,禁止不同山谷的填充水匯合,屏障即為分割成果。相較于點云分割,分水嶺分割方法速度快,且對圖像灰度的細微變化更加敏感,在目標物體周圍生成封閉的輪廓線更加準確清晰,從而獲取單棵林木的位置、冠幅直徑、冠幅面積及高度等信息[3](如圖11 所示)。
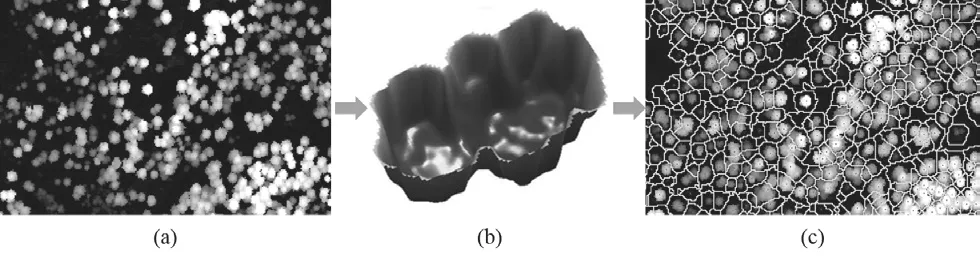
圖11 (a) CHM (b)分割算法 (c)分割成果
4.3 根據林木ID 提取點云
基于分割后的點云數據,生成種子點及單棵樹位置,然后對點云進行分割,同時檢查錯分、漏分等情況。當單木分割精度較差時,可通過紋理映射后的點云數據人工增加和刪除種子點,增加種子點應在剖面窗口進行,盡可能選擇樹頂。本文主要利用商業軟件LiDAR360 軟件實現(如圖12 所示)。
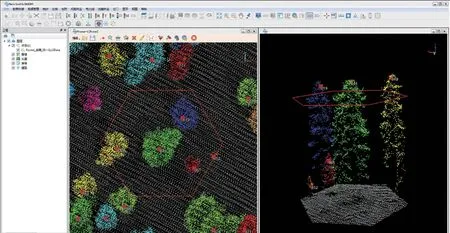
圖12 種子點數據的生成及剖析
整理編輯準確的種子文件后,對單木信息進行提取,比如坐標、樹高、冠幅直徑、覆蓋面積等信息(如圖13 所示)。

圖13 單木信息屬性提取
4.4 根據多波段影像數據解譯樹種信息
僅依靠點云數據無法對樹種進行解譯分析,可利用ArcGIS 軟件,根據樹種解譯標志,基于真色彩影像和近紅外影像進行樹種解譯,極大減少外業調查的工作量。真色彩影像圖像平淡、色調灰暗、顏色不飽和,通常運用于林地和非林地的辨認,以及針葉林、闊葉林等明顯色彩差異的區分。近紅外影像反射率高、吸收率低,可反映植被顏色及紋理信息,輔助對樹種進行辨認。同時,可以根據樹冠的形狀、大小、紋理、分布規律及生活習性等特征判讀樹種。在樹種判讀時,對真色彩影像無法判讀相似顏色,或容易造成判讀錯誤的區域,可以參照近紅外影像的紋理特征加以區分[4]。
4.5 森林生物量和儲積量估測
由于森林普查面積廣泛,圖斑種類繁雜,在獲取大面積點云數據時,點云密度無法精確計算位置、樹高和樹冠直徑、面積、體積等,因此需要在影像圖斑中采集不同種類的樣地實地測量,統計不同圖斑中實際的林儲量和林木參數,為后期大范圍計算提供依據。 樹木種類、數量、地域、生長情況等都與樹木生長的方程參數有關,但較難計算。外業人員需實地采樣獲取樹種的生長特征和詳細參數,制作參數計算公式,利用樹高、樹木數量、樹木胸徑等數據庫建立回歸模型,用計回歸方法進行估測,從而獲取森林儲積量。
獲取林木詳細參數后,與實際點云測量的結果相對比,對樣地范圍內的樹種進行區分、編繪、統計、計算參數,獲得森林儲積成果,林木材積算法如圖14所示。根據歸一化點云數據,提取一系列森林參數,比如郁閉度、間隙率、葉面積指數等信息。
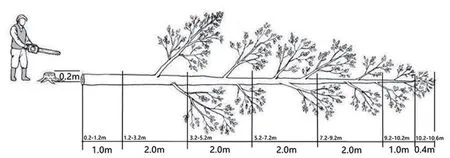
圖14 林木材積算法示意圖
5 結語
本文利用機載LiDAR 和多光譜相機,獲取點云數據和多波段影像數據,并利用單木分割方法精確分割出單個樹木點云,獲取單木位置、冠幅直徑、覆蓋面積等信息,有效估算森林生物量、郁閉度、葉面積指數。光譜影像具有波段多、光譜分辨率高等特點,利用光譜影像疊加分析,可以進行樹種分類、病蟲害分析等,確保調查準確性和地類識別精度,有效減輕調查人員的勞動強度。點云和光譜數據能夠輔助完成森林資源年度出數、一類清查和二類調查等工作,可提高調查效率,破解造林核查、荒漠化監察、林業執法、災害評估等方面的技術難題,為森林普查提供技術支撐。
