基于雷達及北斗定位的車內防遺監測系統設計
2019-09-25 09:43:30
計算機測量與控制 2019年9期
關鍵詞:檢測
(1.中北大學 儀器科學與動態測試教育部重點實驗室,太原 030051; 2.山西省北斗導航與位置應用協同創新中心,太原 030051; 3.泉州職業技術大學,福建 泉州 362000)
0 引言
近年來,全球發生多起高溫天氣下兒童被滯留于車內中暑、死亡的慘劇。據統計,2018年將近52個兒童死于車內高溫的情況,自1998以來,將近有800名兒童死于車內中暑事故[1]。對于此類安全問題,解決途徑包括宣傳教育及技術手段[2],技術方面主要通過車載終端監測并通過無線通信發送短信或APP進行報警[3,4],車載終端中常見的有紅外檢測,采用聲光報警和車窗升降[5],但人體紅外輻射易受遮擋,且紅外傳感器一般放于固定位置,無法穿透及辨別塑料、衣物等物體且容易受熱源、光源干擾,環境溫度和人體溫度接近時,探測和靈敏度下降;有采用壓力傳感器或電容傳感器設計的兒童安全座椅[6],但是坐姿不正確容易導致傳感器工作不正常且安全坐椅體積大;有采用聲音檢測及常閉震動檢測人員滯留[7]、采用有機物傳感器車內環境監測,但容易受車內高溫、周圍聲音及震動影響。
針對上述問題,本設計使用毫米波雷達和北斗定位技術,融合多傳感器檢測算法,實現了車輛運動檢測、車內人員狀態及車內環境實時監測,對解決兒童滯留車內的安全問題有重要的現實意義。
1 車內監測原理及系統方案
1.1 監測原理
通過分析引發車內遺留人員安全問題發生的實際情況及其對人員監測系統的實際需求,本系統采用FMCW體制的MIMO雷達人體探測技術監測車內人員的狀態。人體目標探測技術主要是對人體生理參數的檢測與提取,人體微動、呼吸及心跳都能作為微多普勒特征[8]。FMCW體制的MIMO毫米波雷達可發射調頻連續波信號,在車內環境中,毫米波雷達發射的信號不受衣物、溫度等條件的影響,可用來測量出目標的距離、速度和角度,由于人體微動與車內其它物體和車外的物體運動、車體震動回波信號不同,可將其與外界干擾區分開。監測原理如圖1所示。
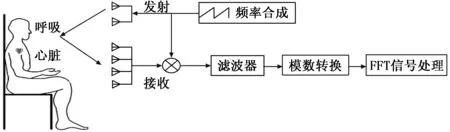
圖1 雷達探測原理
1.2 系統總體方案
系統分為車載終端和上位機測試軟件。車載終端主要完成對車輛運動狀態信息、車內人員狀態信息、車內環境信息的采集、處理和上傳,上位機測試軟件主要完成對車載終端進行功能配置、監測狀態的顯示及報警功能的顯示,車載終端和上位機之間采用串口通信或4G通信模塊進行傳輸,系統總體結構如圖2所示。
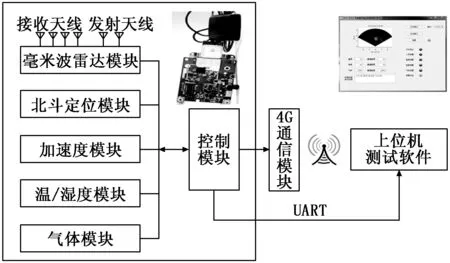
圖2 系統總體框圖
1.2.1 車載終端方案
車內防遺監測系統車載終端主要包括多傳感器監測前端、控制單元、通信單元。如圖3所示,其中多傳感器監測前端分別由雷達天線、雷達收發模塊、北斗定位模塊、加速度傳感器模塊、溫/濕度傳感器模塊、氣體傳感器模塊組成;通信單元采用現有4G通信模塊。
車載終端工作流程為:終端使用STM32作為主控,首先接收上位機的配置指令,然后對傳感器進行讀寫操作、讀取加速度傳感器信息及北斗模塊的位置信息,再啟動雷達模塊、溫度傳感器、氣體傳感器進行信號采集及數據分析,并將處理后的數據通過串口或4G通信模塊上傳到上位機,上位機再對數據進行顯示。
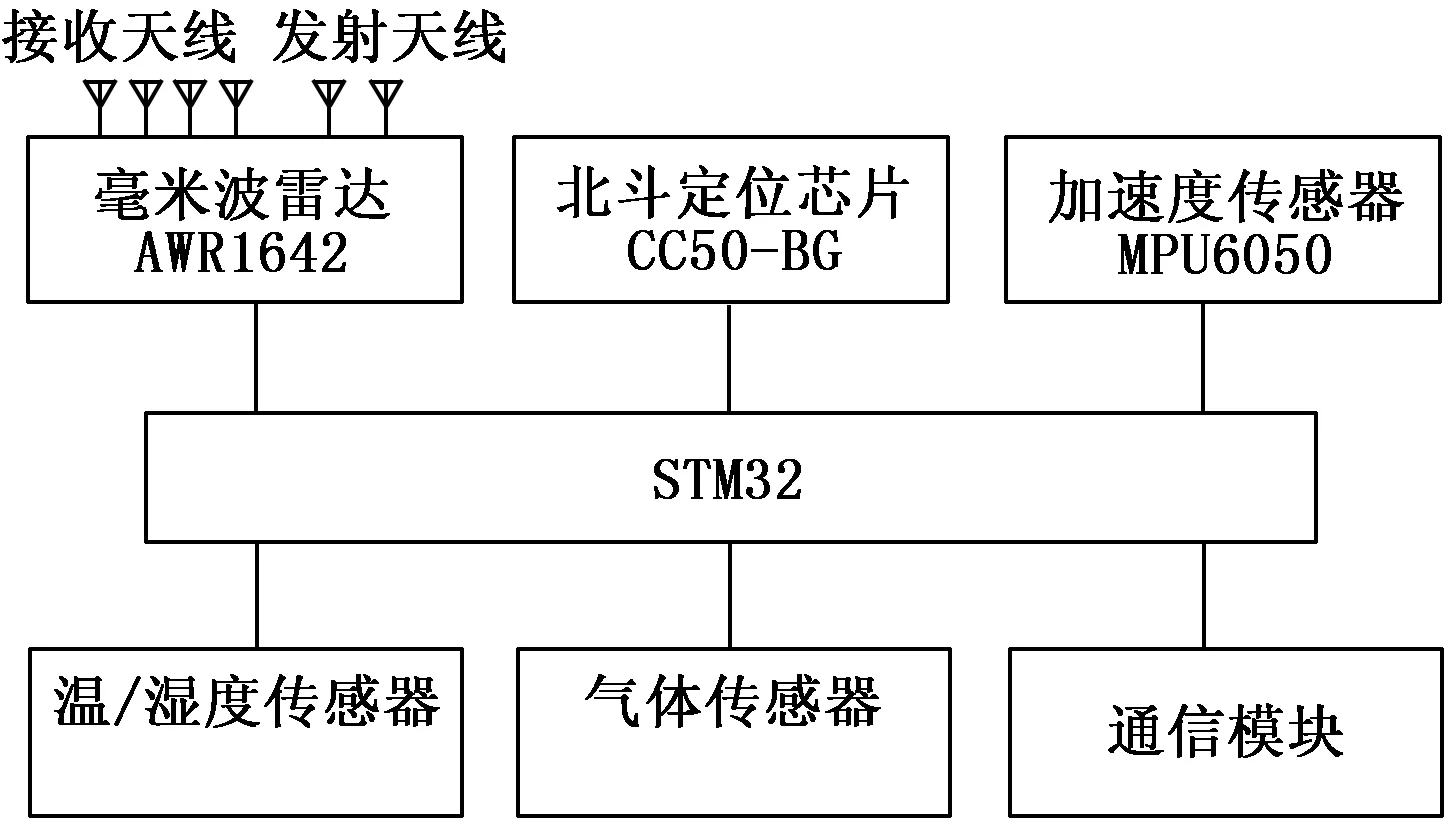
圖3 車載終端硬件系統框圖
1.2.2 測試軟件方案
車內防遺監測系統測試軟件用于對系統功能進行測試及演示,功能包括3個部分:車載終端參數設置、下位機信息的解析、信息實時顯示,軟件整體框架如圖4所示。
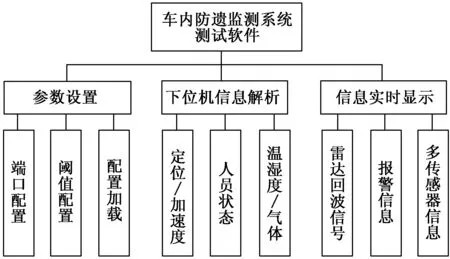
圖4 上位機測試軟件框架圖
參數設置包括端口配置、閾值配置及配置加載,該部分用于對車載終端的各傳感器的報警閾值及雷達信號的調制方式、采樣精度等參數進行配置;下位機信息解析主要用于測試車載終端上傳的各傳感器信息;信息實時顯示部分主要包括雷達人體回波動態顯示、多傳感器數據實時顯示、報警信息顯示。
2 車載終端硬件電路設計
2.1 毫米波雷達模塊
毫米波雷達信號不受外界高溫影響,且可穿透衣服、塑料等物品,因此選用毫米波雷達用于對車內人體多普勒信息進行探測,本系統采用TI公司的AWR1642雷達傳感器設計,該傳感器具有內置PLL和模數轉換器,集成了發送器、接收器、基帶和AD,且集成了DSP子系統和基于ARM R4F的處理器子系統,能實現77 GHz的FMCW雷達載波信號發射、接收以及信號處理,傳感器功能框圖如圖5所示[9]。
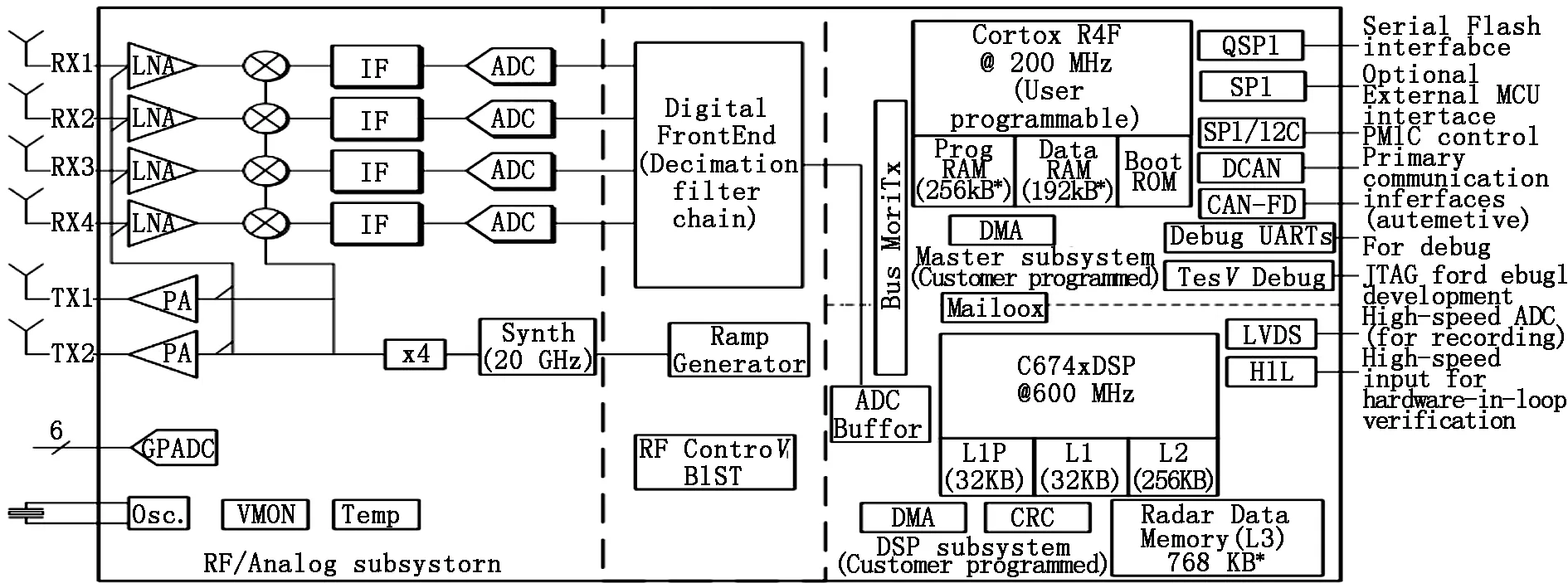
圖5 雷達傳感器功能框圖
使用基于AWR1642雷達傳感器搭建毫米雷達前端,外圍電路不需要過多外設,布局階段要注意發射與接收隔離開來,還要盡可能將射頻信號傳輸線的路徑減小到最小,布線時需要注意將射頻信號輸出線阻抗控制在50歐姆,傳輸線的設計使用ADS的linecalc計算。參考數據手冊設計出的外圍電路主要部分如下。
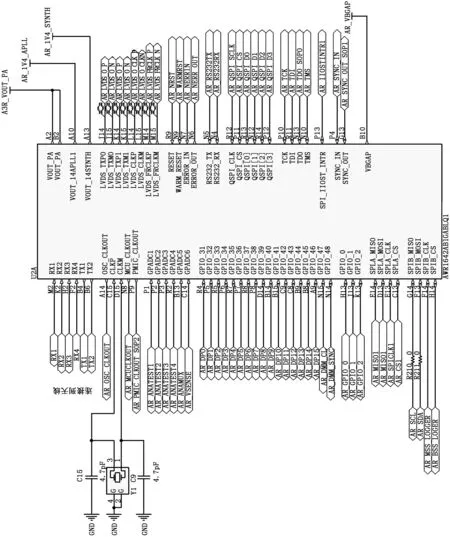
圖6 雷達傳感器電路圖
2.2 北斗定位及加速度模塊
監測系統的汽車運動狀態監測及定位功能主要采用北斗定位及加速度模塊實現。北斗定位模塊選用東方聯星的定位芯片CC50-BG,芯片體積較小,支持B1和L1雙頻點,且為標準NMEA0183數據輸出[10]。該芯片速度精度為0.1 m/s,位置精度3m,結合加速度模塊可準確得到車輛運動信息及定位信息,其外圍電路如圖7所示。
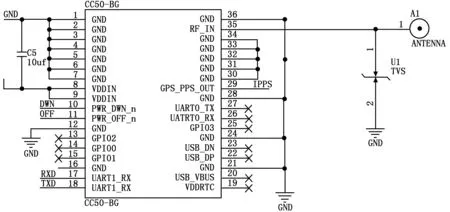
圖7 北斗定位芯片電路圖
加速度傳感器模塊用于精測車輛運動狀態,本設計使用MPU-6050傳感器,其內部集成3軸陀螺儀和3軸加速度計,可將加速度和旋轉運動以及航向信息組合成一個單一的數據流用于應用,具有體積小,精度高等優點[11],適用于小體積、高精度運動測試環境中。其外圍電路如圖8所示。
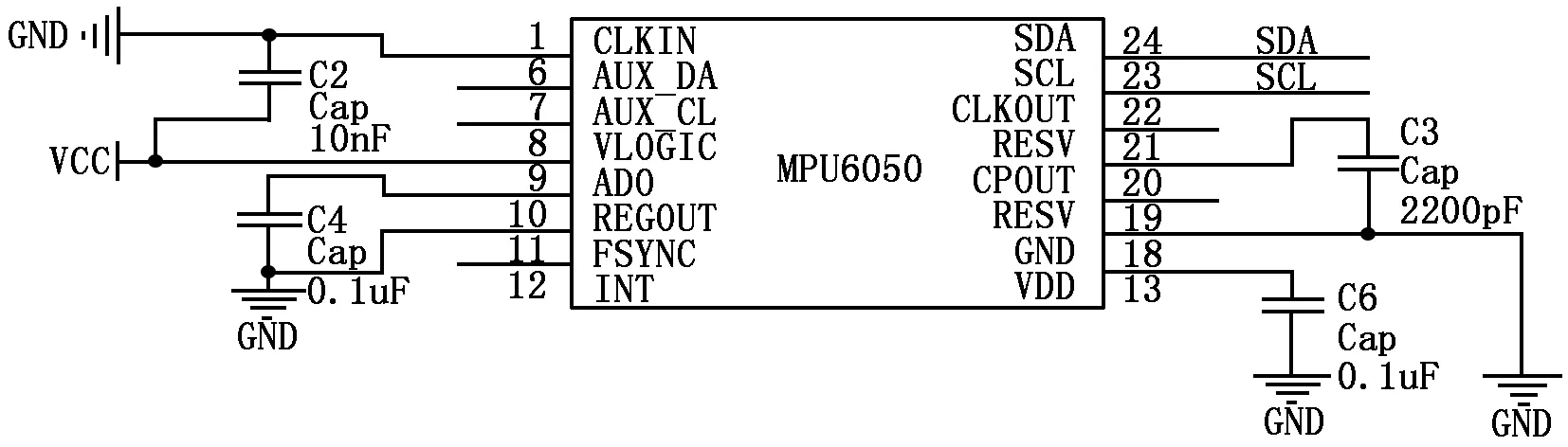
圖8 MPU6050電路圖
2.3 溫/濕度及氣體模塊
溫/濕度模塊使用HDC1080傳感器,這是一款帶有集成溫度傳感器的數字濕度傳感器,可在極低功率下提供出色的測量精度,HDC1080相對濕度的測量范圍是0~100%RH,分辨率為0.03%RH,精度是±2%RH;溫度的測量范圍是-40~125 ℃,精度是±0.2 ℃[12]。其外圍電路設計如下圖所示。
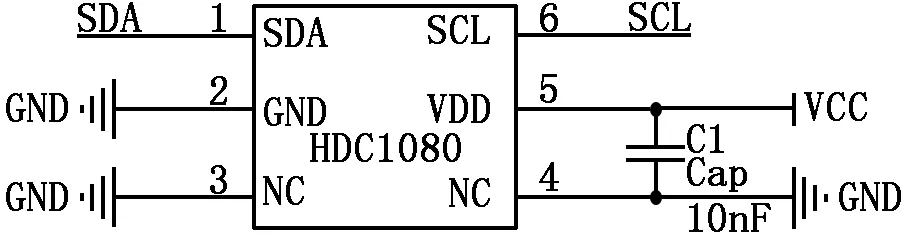
圖9 溫濕度傳感器電路圖
氣體檢測部分采用了CCS811氣體傳感器,該傳感器具有超低功耗,內置微控制器,可通過片上集成的MCU檢測各種揮發性有機化合物,用于室內空氣質量監測。片上MCU通過ADC對模擬數據進行采樣,然后通過I2C接口將數據發送至主設備。CCS811這種板載處理功能降低了總體系統的功耗,延長了便攜式應用中的電池續航時間,并減少了主系統所需進行的處理。其外圍電路如圖10所示。
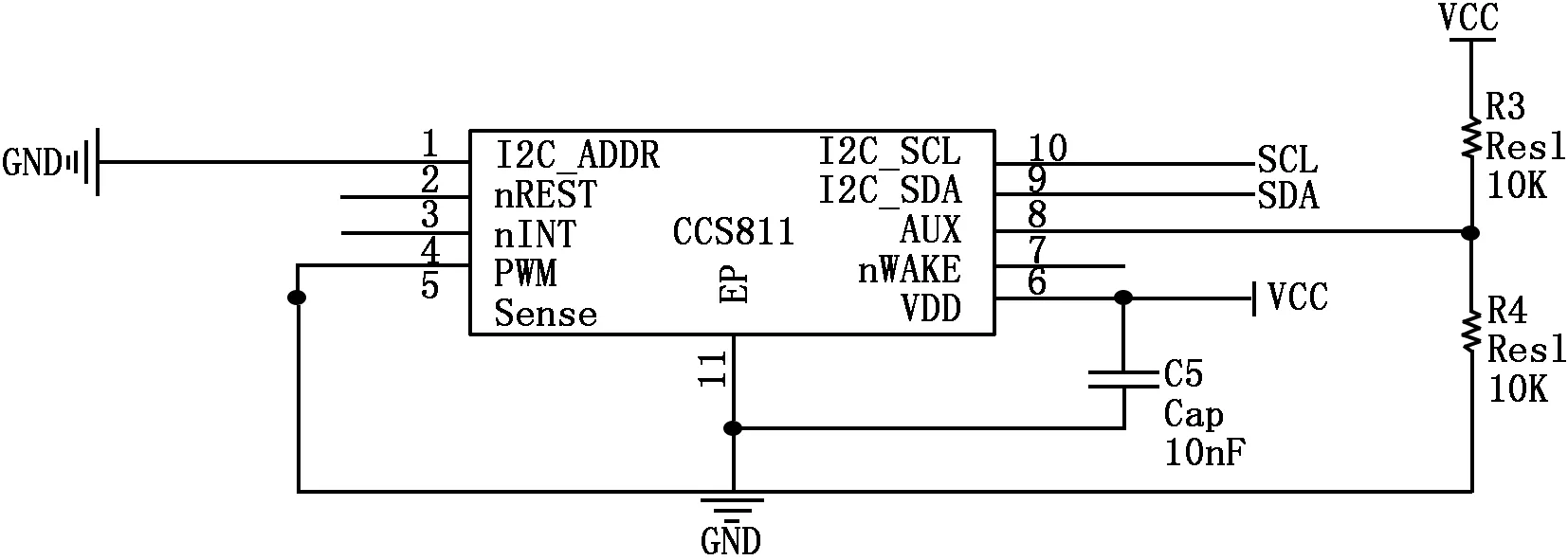
圖10 氣體傳感器電路圖
3 系統軟件設計
3.1 車載終端程序
3.1.1 主程序
車載終端以STM32F103作為主控芯片,通過該芯片與毫米波雷達模塊、北斗定位模塊、加速度模塊等傳感器進行通信,該部分主要對多傳感器進行控制,具體涉及MCU與傳感器通過UART、SPI、I2C總線相連[13],其中I2C總線理論上最多可以同時掛載127個器件,每個器件通過不同的器件地址進行區分,完全滿足終端的多傳感器控制的情況。
車載終端的主程序工作流程為:
1)車載終端上電后,系統對各模塊進行初始化;
2)開啟加速度和北斗定位模塊進行檢測;
3)當檢測到車輛靜止時,開啟雷達模塊檢測車內人員;
4)當車內有人時,進行溫度、濕度及氣體檢測,當各傳感器達到報警閾值時,采用分級報警機制(根據不同溫度、濕度、氣體情況,采用短信、撥打電話、自動報警上傳定位信息)進行報警上傳,報警閾值可根據實測情況進行配置。
主程序的控制流程圖如圖11所示。
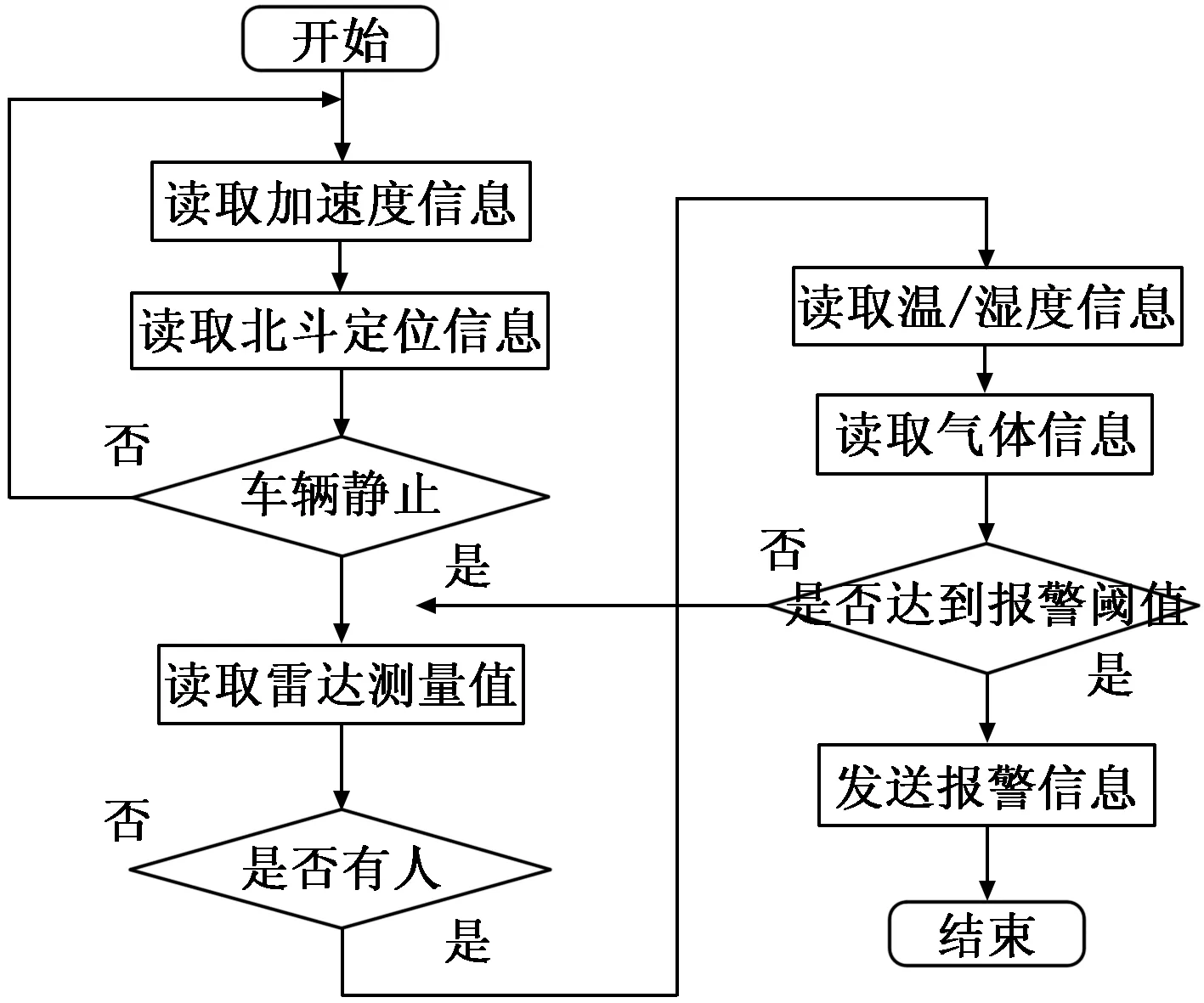
圖11 車載終端主程序流程圖
3.1.2 雷達人體微動探測
系統使用MIMO雷達探測人體微動信號,信號處理主要在AWR1642的DSP上執行,雷達前端收到回波信號后,經過ADC轉換成數據信號進入DSP,在DSP完成幀處理后,將結果格式化并寫入共享內存中再通過ARM R4F通過串口傳輸到上位機,整個處理流程為:
1)雷達回波信號進入DSP,經過距離-FFT、多普勒-FFT處理,對雷達信號進行距離維和速度維的計算,得到目標距離和速度二維反射熱圖;
2)基于minimum variance distortionless response (MVDR)的direction of arrival(DoA)估計方法,提取特征并估計目標的角度;
3)將檢測信息傳輸到ARM。
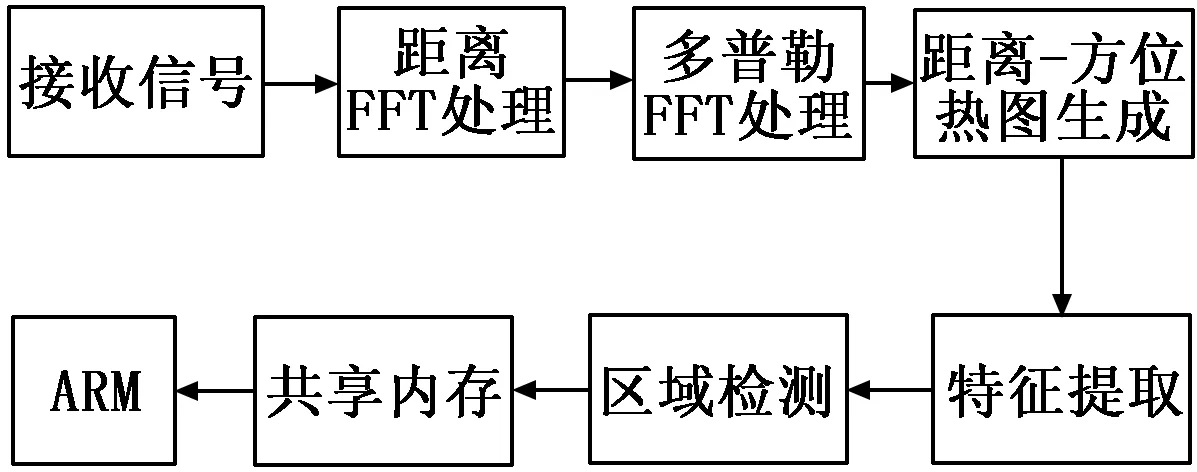
圖12 雷達信號處理流程
3.1.3 北斗定位及加速度融合的運動狀態檢測
系統統采用北斗定位及加速度融合的方法來實時監測車輛運動狀態,車輛在行駛過程時加速度變化最劇烈,可將正常行駛過程與停車過程區分為劇烈運動過程和非劇烈運動過程。若檢測到車輛非劇烈運動,說明車輛停止行駛。
本系統采用雙級檢測算法來判別車輛停止行駛。雙級檢測算法主要分為兩級,每一級算法都獨立地進行一次狀態檢測,第二級算法只針對第一級已經判斷為停止后的過程進行輔助驗證[14]。本系統運動狀態檢測流程為:
1)將獲取到定位信息的利用兩點間距離公式計算得到坐標變化量。
2)選擇滑動窗內各軸向加速度變化值超過門限值的總個數以及定位坐標變化量作為車輛運動狀態參量。
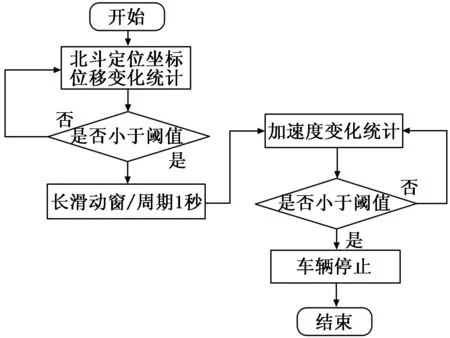
圖13 運動狀態檢測流程圖
3.2 上位機軟件
車內人員智能防遺監測系統測試軟件用于對系統功能進行測試及演示,采用Matlab的APP Designer進行設計,該軟件工作流程為:首先創建主界面,開啟串口向車載終端加載配置,車載終端接收到指令后,向上位機軟件發送消息,上位機軟件的主線程對上傳的信息進行輪循并實時解析數據,將解析后的數據進行動態顯示。主程序流程圖如圖14所示。
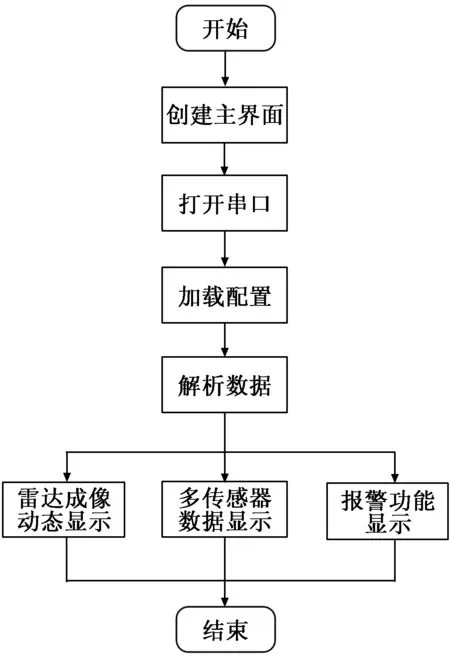
圖14 上位機軟件程序流程圖
4 實驗結果與分析
在室內演示靜止車輛,系統將放于PC機前桌面上,正前方為人,加速度傳感器和導航定位結果顯示其為停止狀態,當靜止狀態判定后,開始啟動雷達傳感器檢測,如圖14所示的車內人員狀態窗口所示,燈(人員報警)顯示出紅色。當檢測到有人的存在,設定溫度35、濕度30為報警界限,使用打火機靠溫度傳感器,用HDC1080實時測定CO2濃度,設定CO2濃度報警界限為2 000 ppm。當氣體傳感器、溫濕度傳感器達到報警閾值時,啟動通信模塊上傳報警信息(包括車內情況、車輛位置)至測試軟件。

圖15 實驗測試結果1
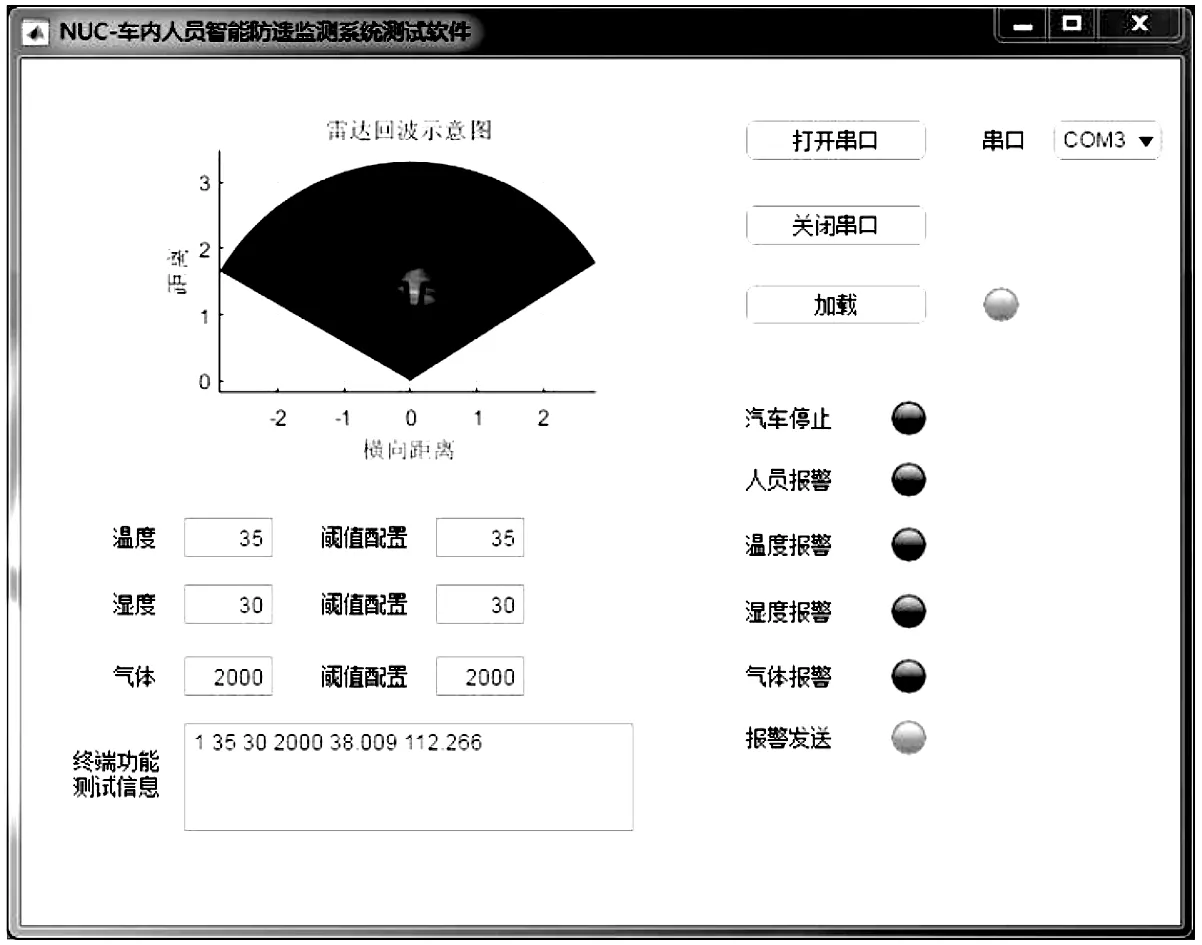
圖16 實驗測試結果2
在車輛運動檢測中,當車停止時,會受到周圍路面震動的影響,且北斗芯片在定位時精度雖然可達到3米,雖然數據波動還是較大,但結合加速度傳感器和定位信息,基本可以滿足本設計的車輛運動檢測要求。人體微動檢測時,當人蓋上衣服處于幾乎靜止的狀態,此時人體的微動特征十分的微弱,雷達仍可以檢測到車內人員的存在。
5 結束語
針對近年來人員遺留車內造成的安全問題,設計了基于MIMO雷達及北斗定位的車內防遺監測系統。該監測系統可獨立放置于車前、車后或側門,可實現車輛駐停后的車載生命探測,實時獲取車內環境及車輛位置信息,并將采集信息存儲、上傳至軟件平臺,同時根據車內情況分級向用戶發送報警信息,保證了車內遺留人員的人身安全。整個系統較好的實現了功能性指標,為后續車內人員微多普勒特征識別提供了技術支撐。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48