基于DSP的交流伺服電機驅動器的設計
2019-09-25 06:14:53李天奕向薈羽沃松林倪福銀
江蘇理工學院學報 2019年2期
李天奕 向薈羽 沃松林 倪福銀

摘要:交流伺服電機控制系統是一種新型的調速系統,該系統具有良好的運行、控制及經濟性能,顯示出巨大的發展潛力。基于DSP的交流伺服電機驅動器的設計,選擇芯片TMS320F2806作為主控芯片,設計電流檢測、位置檢測、驅動電路、保護電路等模塊,并通過CCS軟件平臺設計電流采樣、換相等各模塊程序,實現驅動交流伺服電機的軟件設計。經過軟硬件的聯調,實現通過DSP驅動交流伺服電動機的功能。經測試,交流伺服電動機運行穩定,可用于工程實踐。
關鍵詞:交流伺服電機;TMS320F2806;電機驅動器
隨著現代工業的發展,電動機作為機構執行裝置,一直在現代化生產和生活中發揮著十分重要的作用。作為重要的電機之一伺服電動機及其伺服控制系統廣泛應用于各個領域。無論是數控機床、工業機器人、辦公自動化等領域,都離不開伺服電動機及其伺服控制系統[1-4]。
對于交流伺服電機的控制器,目前主要有微處理器(MCU)、專用集成電路(ASIC)、數字信號處理器(DSP)等三種方式[5-8]。由于微處理器處理能力有限,不適用于控制復雜、實時性和精度要求高的場合,而專用集成電路使用時靈活性較差,受限制多。因此,DSP的發展成為主流趨勢[9,10],它提供高度專業化的指令集,可對輸入輸出數據進行高速處理,使得在控制器的規則實施、矢量控制等方面具備獨特優勢,特別適用于諸如交流伺服電機實現電壓電流雙閉環控制調速等場合[11-12]。
利用TI公司推出的高性能、低價位的DSP芯片TMS320F2806,設計電流檢測、位置采樣、驅動電路、保護電路等模塊,并通過CCS軟件平臺設計電流采樣、換相等各模塊程序,實現驅動交流伺服電機的軟件設計。該驅動控制系統電路設計簡便,可靠性高,并且可以根據工程需要通過調整軟件設計應用到多種場合。
1? ?交流伺服電機的系統硬件設計
該交流伺服電機的驅動系統的硬件是以TI公司生產的TMS320F2806作為主控芯片,包括IGBT逆變電路、驅動電路、相電流檢測電路、系統保護電路、人機界面設計以及電源模塊設計等,整個硬件系統的結構如圖1所示。
1.1? ?電流檢測電路設計
電流檢測電路由霍爾元件、運算放大器和A/D轉換器組成,電路原理如圖2所示,電流反饋采用型號為CS010GT的霍爾傳感器。
1.2? ?位置采樣電路設計
位置信號采樣是通過交流伺服電機本身自帶的霍爾元件來檢測的,由于霍爾元件是集電極開路輸出,其輸出信號經過上拉電阻得出位置方波信號送到DSP的CAP端口,進行位置信號的捕捉,電路原理如圖3所示。
1.3? ?驅動電路設計
驅動電路設計采用美國國際整流公司生產的專用驅動芯片IR2110,共采用3個IR2110,從而實現對控制電路的驅動功能,電機控制器驅動電路如圖4所示。
1.4? ?系統保護電路設計
系統保護電路由圖5所示,電流檢測電阻 R71送出的信號接入 IR2110的過電流檢測輸入端 SD,當主驅動電路發生過流或直通時,SD 端電壓高于 0.5 V,IR2110 內部保護電路使其輸出驅動信號全為低電平,從而使被驅動的功率管全部截止,保護功率管,還將低電壓信號傳到 DSP 芯片的 TICTRIP引腳,復位 DSP 芯片,封鎖脈沖的輸出。
2? ? 交流伺服電機控制策略設計
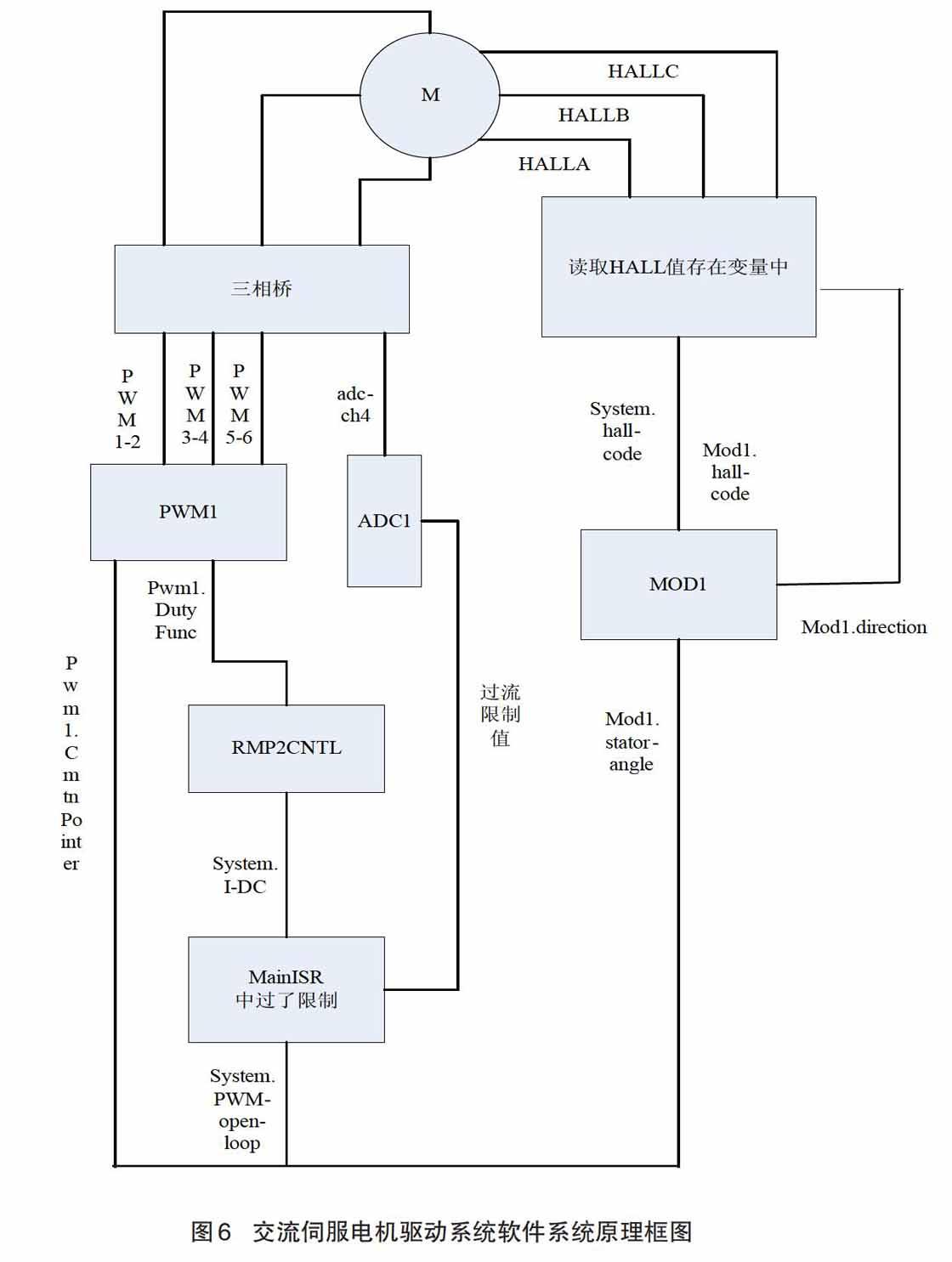
基于DSP的交流伺服電動機控制系統中,交流伺服電機驅動系統軟件設計原理如圖6所示。
(1)通過DSP的I/O口讀取HALL信號,存放于system.hall-code變量中。system.hall-code這個變量賦給MOD1模塊mod1.hall-code, system -direction(電機轉向)變量是自己設定的。MOD1模塊處理上述兩個變量,產生mod1.stator-angle(定子磁場角度)變量的輸出。
(2)MOD1模塊的mod1.stator-angle(定子磁場角度)變量輸入給pwm1.CmtnPointer(輸出定子磁場角度)變量與pwm1.DutyFunc(輸出脈寬)變量。經過PWM1模塊運算通過PWM1-PWM6輸出給三相橋,驅動電機運轉。
(3)ADC檢測三相橋的電流,經過除去最大、最小值再平均的算法,得到電流值,在不過流的情況下,直接把system.PWM-open-loop賦給system.I-DC然后經過RMP2模塊,將要輸出的脈寬斜坡加上去。
2.1? ?電流采樣程序
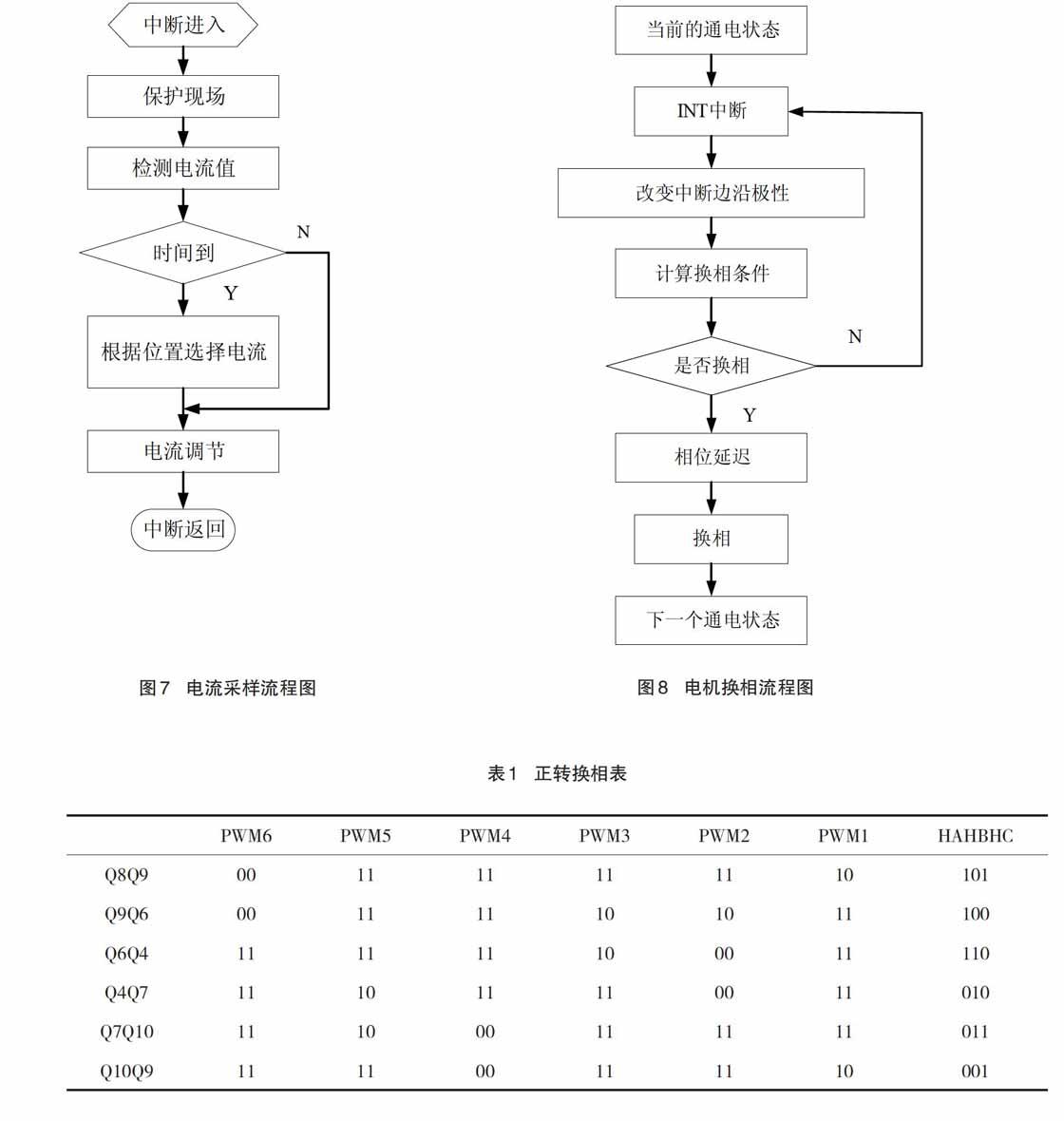
在該系統中,電機運行時,對于每路轉子位置信號和電流調節的周期是異步的,根據當前逆變橋的導通情況,選擇適當的相電流作為電流調節器的反饋量,完成電流的調節作用流程如圖7所示。
2.2? ?換相設計
換相模塊就是通過讀取霍爾位置中斷捕捉模塊中的霍爾信號獲取電機轉子位置信號,確定逆變器功率管的開關狀態。電機換相流程如圖8所示。
由于每一個霍爾傳感器都會產生180°脈寬的輸出信號,三個霍爾傳感器的輸出信號相差120°相位差,這樣它們在每轉過360°電角度中共有6個上升或下降沿,正好對應著6個換相時刻,可得出電機轉子霍爾位置狀態與逆變器功率管的導通關系,如表 1 所示,反映了電機正轉所對應的PWM狀態。
將DSP設置為雙沿觸發捕捉中斷功能,就可以獲得這6個時刻。通過設置CAP1-CAP3 為I/O功能查詢捕獲單元位置信號的輸入引腳獲得轉子位置信號,根據此信號值查表1計算換相程序偏移向量,調用相應的換相PWM子程序,從而通過改變PWM方式控制寄存器ACTRA的值來控制PWM輸出信號的改變,實現電動機的換相,然后恢復CAP1-CAP3的捕捉功能。
3? ? 運行結果分析
3.1? ?驅動電機調試
先將編寫好的程序燒錄到DSP中,手工調試電機,可以看到轉動6格后HALL值開始重復,記錄這6格HALL值的順序,看是不是623154或者451236,如果不對,則交換連根電機輸入到驅動板上的HALL信號線,再用同樣的方法測試,直到調試正確。檢測結果如圖9所示。從數碼管顯示結果可以看出電機與驅動板連接正確。
3.2? ?電機運行及結果分析
在電腦上運行 CCS 3.3 軟件,通過 DSP 專用仿真器連接 JTAG 對 DSP 進行仿真。用示波器檢測DSP輸出端口的PWM波形,通過觀察發現該波形為調節脈寬的方波,與理論相符合,如圖10所示。
當電機正常運行時,PWM輸出端的指示燈為全亮狀態。該驅動控制系統有2種調速方法:(1)通過按鍵調節脈寬的輸出值。可觀察脈寬輸出值對電機轉速的影響。(2)通過調節輸入到電機上的直流穩壓電源的值的大小來調節電機的轉速,電壓越大電機轉動速度越快,但不能超過電機的額定電壓值。根據檢測結果分析,該設計實現了DSP驅動交流伺服電機的功能。
4? ? 結語
近年來,隨著電機技術及其相關學科的發展,交流伺服電動機以其良好的調速性能、可靠性強和使用壽命長等突出優點,在工業控制的各個領域得到了迅速發展。本研究主要以TI公司高性能、低價位的DSP芯片TMS320F2806為主控芯片,設計電流檢測、位置采樣、驅動電路、保護電路等模塊電路,并通過CCS軟件平臺設計電流采樣、換相等各模塊程序,實現驅動交流伺服電機運行。運行結果表明,該驅動控制系統電路設計簡便,可靠性高,并且可以根據工程需要,通過調整軟件設計應用到多種場合,具有很好的工程價值。
參考文獻:
[1] 黃敏高,龔仲華,王芳.工業機器人驅動系統現狀與展望[J].機床與液壓,2018,46(3):79-83.
[2] 張燕紅,王搖磊,吳搖璇,等.基于 ARM 的高性能交流伺服電機系統設計[J].微特電機,2018,46(5):14-16.
[3] 王淑嫻,彭東林,吳治嶧,等.伺服電機位置檢測技術綜述[J].儀器儀表學報,2018,39(8):143-153.
[4] 盧琳.基于TMS320F2812的交流伺服電機控制器[D].上海:上海交通大學,2007.
[5] 周亞芹,李維嘉,趙勇剛.交流伺服電機驅動器的優化控制研究[J].武漢理工大學學報,2012,34(12):130-133.
[6] 劉東,余志平,楊延西.基于DSP的無刷直流電動機無傳感器控制系統設計[J].電機與控制學報,2002,6(1):29-33.
[7] 陳佳桂.永磁同步電機伺服驅動控制器的研制[D].廣州:廣東工業大學,2008.
[8] 莫會成,閔琳.現代高性能永磁交流伺服系統綜述——傳感裝置與技術[J].電工技術學報,2015,30(6):10-21.
[9] 韓安太,劉峙飛,黃海.DSP控制器原理及其在運動控制系統的應用[M].北京:清華大學出版社,2003.
[10] 紀志成,金小俊,沈艷霞.DSP在無傳感器無刷直流電機控制中的應用[J].微電機,2001,34(5):29-32.
[11] BRAIER Z,KLOUCEK P. System of measurement and evaluation of AC servo motor's mechanic, electric and control quantities [C]. 2015 IEEE International Workshop of Electronics,Control,Measurement, Signals and their Application to Mechatronics (ECMSM), 2005:1-5.
[12] DARIUSZ J. Sensorless control of permanentmagnet synchronous motor based on unscented Kalman filter [C]. International Conference on Power Engineering, Energy and Electrical Drives, 2011: 1-6.
Abstract: The AC servo motor control system is a new type of speed control system with good operation, control and economic performance. It has great potential for development in the future. The article studies the design of AC servo motor drive based on DSP. The chipset TMS320F2806 is selected as the core chip, and the modules schematic such as current detection, position detection, driving circuit, protection circuit are designed. In addition, the design of AC servo motor drivers software such as current detection, commutating phase are programmed through the CCS v3.3 software. Finally, the function of AC servo motor drive is achieved by the alignment of hardware and software. According to the test, the system can operate stably and can be used into engineering practice.
Key? words: AC servo motor; TMS320F2806; motor drive
責任編輯? ? 張志釗
