基于FLUENT的擺桿式明渠測(cè)流特性數(shù)值模擬
2019-09-26 08:23:18周義仁石先德
節(jié)水灌溉 2019年9期
周義仁,石先德,張 茜
(太原理工大學(xué)水利科學(xué)與工程學(xué)院,太原 030024)
灌區(qū)精準(zhǔn)量水是提高農(nóng)業(yè)用水利用率的基礎(chǔ)所在[1],本文針對(duì)灌區(qū)量水過(guò)程中存在的測(cè)流精度低、水頭損失大等問(wèn)題提出了一種新型量水裝置----擺桿式明渠測(cè)流裝置,其工作原理需建立擺桿擺動(dòng)角度和渠道流量之間關(guān)系進(jìn)行測(cè)流,探究該裝置在不同類型渠道和測(cè)流擺桿下的測(cè)流特性具有重要意義。隨著數(shù)值模擬技術(shù)的發(fā)展,計(jì)算流體力學(xué)所能計(jì)算的領(lǐng)域越來(lái)越多[2],通過(guò)數(shù)值模擬方法建立數(shù)學(xué)模型解決實(shí)際工程問(wèn)題具有投入少、研究周期短、可調(diào)參數(shù)多等優(yōu)點(diǎn)。FLUENT是目前應(yīng)用最為廣泛的計(jì)算流體力學(xué)軟件,其計(jì)算方法及后處理功能十分先進(jìn)[3]。擺桿式明渠測(cè)流裝置進(jìn)行測(cè)流任務(wù)時(shí),測(cè)流擺桿由于水流沖擊而擺動(dòng),是屬于固體邊界在流域中產(chǎn)生的被動(dòng)運(yùn)動(dòng),在FLUENT中,動(dòng)網(wǎng)格模型可以用來(lái)模擬由于流域邊界運(yùn)動(dòng)引起流域形狀隨時(shí)間變化的流動(dòng)情況,也可以用來(lái)模擬由于流場(chǎng)改變而導(dǎo)致固體邊界發(fā)生被動(dòng)運(yùn)動(dòng)情況[4,5]。利用FLUENT軟件對(duì)擺桿式明渠測(cè)流裝置測(cè)流特性進(jìn)行研究,可以提高該裝置的測(cè)流精度及適用性。
1 擺桿式明渠測(cè)流裝置簡(jiǎn)介
擺桿式明渠測(cè)流裝置機(jī)械結(jié)構(gòu)如圖1所示。

1-渠道邊坡;2-調(diào)平旋鈕;3-可伸縮不銹鋼支架;4-超聲波探頭;5-液晶顯示器;6-供電及數(shù)據(jù)處理模塊;7-水平儀;8-角度傳感器;9-測(cè)流擺桿圖1 擺桿式明渠測(cè)流裝置
圓柱形擺桿放置于流動(dòng)的水中時(shí)受到渠道水流阻力和升力作用,會(huì)沿水流方向擺動(dòng),通過(guò)建立渠道流量和擺桿擺動(dòng)角度之間的關(guān)系,測(cè)得擺桿旋轉(zhuǎn)角度便可以得知渠道瞬時(shí)流量。
2 數(shù)值模擬研究
2.1 計(jì)算模型及控制方程
計(jì)算采用VOF自由液面模型,對(duì)于水氣兩相流動(dòng),VOF模型對(duì)其進(jìn)行描述時(shí),先定義函數(shù)qw(x,y,z,t)和qa(x,y,z,t),它們分別表示水與空氣在某一時(shí)刻的某一單元格內(nèi)的體積分?jǐn)?shù)。而在每一個(gè)單元格內(nèi)[6]:
qw+qa=1
(1)
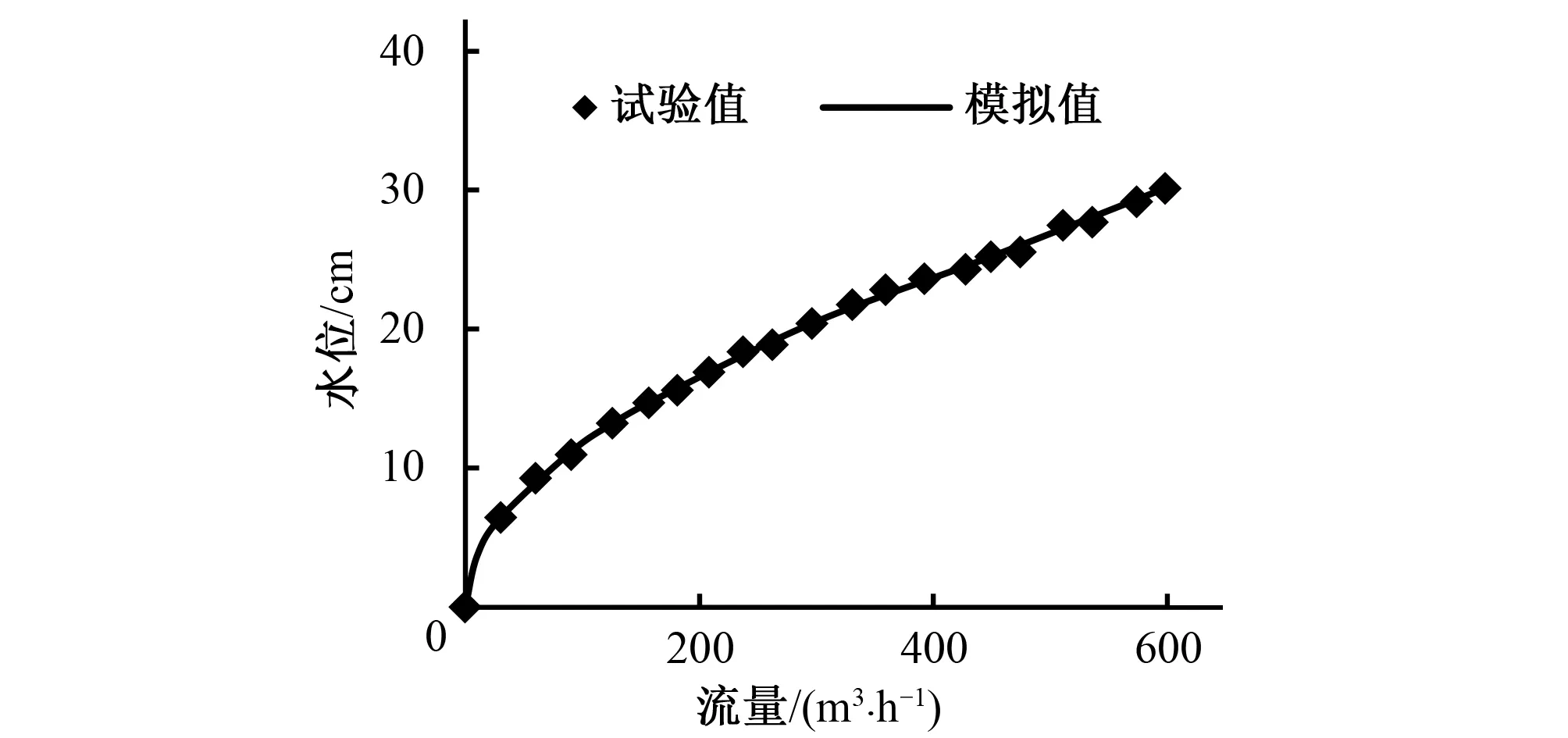
通過(guò)公式(1)能夠得到,當(dāng)qw=1時(shí),表示在該單元格內(nèi)水的體積分?jǐn)?shù)為1,也就是這個(gè)單元內(nèi)充滿了水;反之,qa=1時(shí),則表示這個(gè)單元內(nèi)全都是空氣;若0 (2) 式中:t為時(shí)間;ui為速度分量;xi為坐標(biāo)分量。 湍流模型選用Realizablek-ε模型,連續(xù)性方程、動(dòng)量方程、湍流動(dòng)能k方程、湍流耗散率ε方程如下所示[8]: (3) (4) Gk+Gb-ρε-Ym+Sk (5) (6) 本文模擬及試驗(yàn)所用渠道為D50型U形渠道,其主要參數(shù)為:渠深0.5 m,渠道底弧半徑0.25 m,底弧圓心角163°,渠道傾角8.5°,渠頂寬度0.58 m,渠道底坡為1/1 000。為了充分模擬U形渠道水流流態(tài)并盡量減少計(jì)算機(jī)模擬時(shí)間,渠道長(zhǎng)度設(shè)為4 m,入口處1 m設(shè)置長(zhǎng)方體穩(wěn)流池,確保水流從入口處平穩(wěn)過(guò)渡到U形渠道中。設(shè)備放置于U形渠道中央,距出口2 m位置,取擺桿頂端圓心為坐標(biāo)原點(diǎn),水流方向?yàn)閆軸正方向,豎直向上為Y軸正方向,順?biāo)鞣较蜃蟀稙閄軸正方向,如圖2所示。 圖2 坐標(biāo)軸示意圖 結(jié)構(gòu)化網(wǎng)格與非結(jié)構(gòu)化網(wǎng)格聯(lián)合進(jìn)行求解,可以很好地解決計(jì)算緩慢以及網(wǎng)格質(zhì)量差等問(wèn)題,使得模擬更加精準(zhǔn)和高效[9,10]。計(jì)算模型在最大尺度以及最小尺度之間存在較大差異(渠道長(zhǎng)達(dá)4 m,測(cè)流擺桿直徑為5 mm),所以在擺桿上下游0.5 m以內(nèi)采用非結(jié)構(gòu)化網(wǎng)格,在擺桿運(yùn)動(dòng)范圍之外采取結(jié)構(gòu)化網(wǎng)格。設(shè)置全局網(wǎng)格最大尺寸為4 cm,在擺桿周圍進(jìn)行非結(jié)構(gòu)化網(wǎng)格劃分,并對(duì)擺桿進(jìn)行局部加密處理,擺桿表面最大網(wǎng)格尺寸為1 mm,網(wǎng)格總數(shù)約為36萬(wàn)個(gè),網(wǎng)格劃分如圖3所示。 圖3 網(wǎng)格劃分示意圖 為了更加精確的模擬渠道水流流動(dòng)對(duì)擺桿式明渠測(cè)流精度的影響,上游設(shè)置進(jìn)口為速度入口(VELOCITY-INLET),利用平均流速來(lái)控制渠道瞬時(shí)流量大小;下游出口設(shè)置為壓力出口(PRESSURE-OUTLET);渠道頂部設(shè)為壓力進(jìn)口(PRESSURE-INLET),受到大氣壓強(qiáng)作用,頂部參考?jí)簭?qiáng)為101 kPa;擺桿以及渠道側(cè)面全部設(shè)為無(wú)滑移固體邊壁,渠道壁面為不銹鋼材質(zhì),設(shè)置壁面粗糙度高度為0 cm,粗糙度常數(shù)為0.5。整個(gè)計(jì)算域中最開(kāi)始時(shí)充滿了空氣,通過(guò)VOF方法進(jìn)行迭代,自動(dòng)生成水氣交界面。 本文主要采用有限體積法進(jìn)行計(jì)算,主要步驟是進(jìn)行計(jì)算區(qū)域劃分后,進(jìn)行區(qū)域的離散化與控制方程的離散,計(jì)算區(qū)域的離散化實(shí)質(zhì)上便是上述所提到的網(wǎng)格劃分。控制方程的離散化可以利用如下所示的通用形式表示[11]: (7) 式中:ρ為流體密度;u為液體流速;t為時(shí)間;φ為廣義變量,可以為速度、溫度或者濃度等一些待求物理量;Γ是相應(yīng)于φ的廣義擴(kuò)散項(xiàng);Sk是廣義源項(xiàng)。 建立了可以進(jìn)行計(jì)算的代數(shù)方程組之后,需要對(duì)各個(gè)未知量的求解順序以及方式進(jìn)行特殊處理,對(duì)于瞬態(tài)計(jì)算,采用PISO算法比SIMPLE或者SIMPLEC算法更加合適。 在FLUENT中動(dòng)網(wǎng)格更新方法主要有3種,包括彈簧近似光滑模型(Spring-based Smoothing)、動(dòng)態(tài)分層模型(Dynamic Layering)以及局部網(wǎng)格重構(gòu)模型(Local Remeshing)[12]。本文主要采用彈簧光順與局部網(wǎng)格重構(gòu)相結(jié)合進(jìn)行計(jì)算。 動(dòng)網(wǎng)格流場(chǎng)控制模型中,計(jì)算區(qū)域是變化的,其守恒方程為[13]: (8) FLUENT中6DOF(六自由度)模型主要是用于模擬計(jì)算域中的剛體構(gòu)件受到流體的作用之后運(yùn)動(dòng)的軌跡及狀態(tài),通過(guò)模擬流體的運(yùn)動(dòng)對(duì)剛體產(chǎn)生的作用力,來(lái)推算剛體的運(yùn)動(dòng)軌跡。其中剛體的質(zhì)量、位移、旋轉(zhuǎn)以及轉(zhuǎn)動(dòng)慣量可以通過(guò)UDF(用戶自定義函數(shù))來(lái)進(jìn)行編寫錄入[14]。 本文主要研究3種不同材質(zhì)的測(cè)流擺桿在D50型U形渠道下的測(cè)流特性,不同材質(zhì)的擺桿參數(shù)如表1所示。 對(duì)明渠進(jìn)行三維數(shù)值模擬時(shí),水面線是一項(xiàng)基本研究對(duì)象,通過(guò)試驗(yàn)與模擬結(jié)果的比較,可以驗(yàn)證數(shù)值模擬的可行性。 表1 不同材質(zhì)測(cè)流擺桿參數(shù) 對(duì)不同流量下D50型U形渠道水流進(jìn)行模擬可以得到測(cè)流裝置下方(Z=0 m)水位隨流量變化圖,如圖4所示。 圖4 水位與流量關(guān)系圖 當(dāng)渠道瞬時(shí)流量為300 m3/h時(shí),采用鋁材測(cè)流擺桿,t=0 s時(shí)開(kāi)始從入口注水,渠道水流從入口到出口水面線隨時(shí)間變化瞬態(tài)圖如圖5所示,圖中藍(lán)色區(qū)域?yàn)榭諝猓t色區(qū)域?yàn)樗鳎t藍(lán)相間區(qū)域?yàn)樗畾饨唤缑妫咨珔^(qū)域?yàn)閿[桿。觀察圖5可以發(fā)現(xiàn),隨著入口處水流不斷涌入渠道,渠道中水位逐漸上升,當(dāng)t=6.87 s以后,水位趨于平緩。穩(wěn)流池與渠道相接處水面略有壅高,這是由于穩(wěn)流池出口截面較小,水流撞擊壁面后造成水位上升。測(cè)流設(shè)備上下游1 m水流平緩,在渠道出口處水位有所下降。由圖4與圖5可以發(fā)現(xiàn),利用數(shù)值模擬對(duì)U形渠道進(jìn)行仿真模擬得到的渠道水位與試驗(yàn)結(jié)果相近,所以利用VOF方法以及Realizablek-ε湍流模型對(duì)渠道水流進(jìn)行數(shù)值模擬可以得到與實(shí)際相符的結(jié)果。 圖5 300 m3/h流量下渠道沿程水面線變化圖 為了解U形渠道過(guò)水?dāng)嗝媪魉僮兓卣鳎瑢?duì)測(cè)流設(shè)備下方(Z=0 m)測(cè)流斷面進(jìn)行流速分析,如圖6所示為不同流量下,渠道過(guò)水?dāng)嗝嫜厮鞣较?Z軸正方向)水流流速分布云圖。 由圖6可以發(fā)現(xiàn),在底坡為1/1 000的D50型U形渠道中,隨著渠道內(nèi)流量的增加,過(guò)水?dāng)嗝婷娣e增大,水位逐漸升高,水流流速逐漸增大,當(dāng)流量為150 m3/h時(shí),最大流速為0.96 m/s,當(dāng)流量為600 m3/h時(shí),最大流速達(dá)到1.37 m/s。對(duì)于渠道斷面沿水流方向的流速分布而言,在靠近渠道邊壁的流速急劇下降,在渠道邊壁區(qū)域接近于0 m/s,其最大流速位于水面下方,在氣液交界面處,流速較緩,這與渠道實(shí)際流速分布規(guī)律相吻合。 對(duì)于動(dòng)網(wǎng)格的計(jì)算方法,本文主要采用彈簧光順與局部網(wǎng)格重構(gòu)相結(jié)合進(jìn)行計(jì)算。彈簧光順將網(wǎng)格節(jié)點(diǎn)視為可變形的彈簧,固體邊界發(fā)生位置變化時(shí),將會(huì)擠壓或者拉伸網(wǎng)格,通過(guò)求解彈簧的應(yīng)力平衡方程得到新網(wǎng)格的節(jié)點(diǎn)位置,但是其只能處理網(wǎng)格微小變形的情況,當(dāng)網(wǎng)格變形較大時(shí),則需要利用局部網(wǎng)格重構(gòu)技術(shù)。針對(duì)網(wǎng)格尺寸以及畸變率,當(dāng)網(wǎng)格出現(xiàn)較大程度的變形時(shí),將會(huì)對(duì)該區(qū)域的網(wǎng)格進(jìn)行網(wǎng)格重構(gòu),通過(guò)守恒定律以及插值映射從舊網(wǎng)格中得到物理量的大小。如圖7所示,以不銹鋼材質(zhì)擺桿在不同流量的水流作用下產(chǎn)生網(wǎng)格重構(gòu)的變化為例,對(duì)動(dòng)網(wǎng)格變化進(jìn)行分析。圖7藍(lán)色區(qū)域?yàn)榭諝猓t色區(qū)域?yàn)樗鳎t藍(lán)相間區(qū)域?yàn)樗畾饨唤缑妗?/p> 圖6 不同流量下斷面流速分布云圖 圖7 不銹鋼材質(zhì)擺桿局部網(wǎng)格變化 由圖7可以發(fā)現(xiàn),當(dāng)擺桿受到水流作用向下游擺動(dòng)時(shí),擺桿周圍的網(wǎng)格發(fā)生變形,下游網(wǎng)格受到擺桿擠壓,體積變小,而擺桿上游位置的網(wǎng)格體積增大。隨著流量的增大,擺桿擺動(dòng)的角度隨之增大,動(dòng)網(wǎng)格更新的區(qū)域也隨之增大,且之前擺桿經(jīng)過(guò)的區(qū)域網(wǎng)格變得更加密集。在整個(gè)迭代計(jì)算過(guò)程中,網(wǎng)格體積始終沒(méi)有出現(xiàn)負(fù)體積。通過(guò)模擬研究發(fā)現(xiàn),鋁材以及有機(jī)玻璃兩種材質(zhì)的測(cè)流擺桿與圖7中不銹鋼材質(zhì)擺桿周圍網(wǎng)格變化規(guī)律相似,說(shuō)明采用FLUENT中6DOF動(dòng)網(wǎng)格模型模擬擺桿式測(cè)流裝置測(cè)流特性是可行的。 擺桿式明渠測(cè)流裝置測(cè)得流量Q與以下因素有關(guān):水的密度 、重力加速度g、測(cè)流擺桿密度 、測(cè)流擺桿長(zhǎng)度L、測(cè)流擺桿直徑D、測(cè)流擺桿被水推動(dòng)的水平位移d(d=Lsinθ)、水中泥沙濃度S、水動(dòng)力黏滯系數(shù)v、渠道糙率n以及渠道底坡i。擺桿式明渠測(cè)流裝置的測(cè)流計(jì)算公式可以通過(guò)量綱分析法推導(dǎo)得到。選取d,g,ρ桿3個(gè)相互獨(dú)立的量作為研究基本物理量,最終可以得到以下測(cè)流公式: (9) (10) Q=Ksin2.5θ (11) 對(duì)D50型U形渠道下不同材質(zhì)的測(cè)流擺桿測(cè)流特性進(jìn)行數(shù)值模擬,得到3種材質(zhì)擺桿在不同流量下相應(yīng)擺動(dòng)角度,利用線性擬合得到式(11)中系數(shù)K的大小,便得到了擺桿式明渠測(cè)流裝置在該渠道下的測(cè)流公式,如表2所示。 表2 不同材質(zhì)測(cè)流擺桿測(cè)流公式 圖8為模擬值與試驗(yàn)值對(duì)比圖,主坐標(biāo)軸反映了不同材質(zhì)的測(cè)流擺桿sin2.5θ與渠道流量Q之間的關(guān)系,次坐標(biāo)軸反映了利用表2算得流量與實(shí)際流量之間的相對(duì)誤差。由圖8可以發(fā)現(xiàn),不同材質(zhì)的測(cè)流擺桿在U形渠道下,渠道流量Q與擺桿擺動(dòng)角度sin2.5θ之間成正比例函數(shù)關(guān)系,模擬值與試驗(yàn)值變化一致。利用測(cè)流公式得到渠道流量與真實(shí)流量之間相對(duì)誤差α較小,其中不銹鋼材質(zhì)的測(cè)流擺桿測(cè)得流量最大相對(duì)誤差為5.33%,平均相對(duì)誤差為2.5%;鋁材測(cè)流擺桿測(cè)得流量最大相對(duì)誤差為5.55%,平均相對(duì)誤差為1.87%;有機(jī)玻璃材質(zhì)測(cè)流擺桿測(cè)得流量最大相對(duì)誤差為5.26%,平均相對(duì)誤差為2.22%。 利用FLUENT對(duì)擺桿式明渠測(cè)流裝置在底坡為1/1 000的D50型U形渠道下測(cè)流特性進(jìn)行數(shù)值模擬研究,通過(guò)數(shù)值模擬以及試驗(yàn)數(shù)據(jù)對(duì)比分析得到以下結(jié)論。 圖8 不同材質(zhì)擺桿流量與角度關(guān)系圖 (1)利用FLUENT中VOF模型與Realizablek-ε湍流模型對(duì)D50型U形渠道下水流特性進(jìn)行模擬研究是可行的,模擬渠道沿程水面線與試驗(yàn)相符。渠道過(guò)水?dāng)嗝嫔狭魉俜植家?guī)律為:在靠近渠道邊壁的區(qū)域水流流速急劇下降,在邊壁旁趨近于零,而水流最大流速并不是位于水面位置,而是在水面下方的位置,這也與國(guó)內(nèi)外其他學(xué)者研究結(jié)論一致。 (2)利用6DOF動(dòng)網(wǎng)格模型對(duì)測(cè)流擺桿擺動(dòng)特性進(jìn)行模擬是可行的,通過(guò)水流與擺桿之間的耦合計(jì)算可以得到擺桿的擺動(dòng)角度與渠道流量大小之間的變化規(guī)律,隨著渠道內(nèi)瞬時(shí)流量的增大,擺桿擺動(dòng)的角度也逐漸增大,擺桿周圍非結(jié)構(gòu)化網(wǎng)格產(chǎn)生重構(gòu)。 (3)利用數(shù)值模擬對(duì)擺桿式測(cè)流裝置測(cè)流精度進(jìn)行研究,發(fā)現(xiàn)量綱分析得到的測(cè)流公式Q=Ksin2.5θ中系數(shù)K大小隨著擺桿密度的減小而減小,測(cè)得流量與實(shí)際流量之間平均相對(duì)誤差小于3%,可以滿足明渠測(cè)流精度要求。 本文對(duì)擺桿式明渠測(cè)流裝置測(cè)流特性進(jìn)行數(shù)值模擬研究,模擬結(jié)果與實(shí)際情況一致,充分驗(yàn)證了該測(cè)流裝置的可行性,對(duì)提高該裝置測(cè)流精度有重要意義,為灌區(qū)精準(zhǔn)量水的發(fā)展提供了新思路。
2.2 幾何建模及網(wǎng)格劃分


2.3 邊界條件及求解方法
2.4 動(dòng)網(wǎng)格設(shè)定

3 結(jié)果分析
3.1 水面線分析


3.2 流速分布
3.3 動(dòng)網(wǎng)格變化分析


3.4 測(cè)流公式及精度分析

4 結(jié) 語(yǔ)