永磁同步電機初始位置檢測及啟動方法
2019-10-08 05:49:00徐志書楊金鵬岳宗帥李東東王婕
電子技術與軟件工程 2019年15期
關鍵詞:磁場
文/徐志書 楊金鵬 岳宗帥 李東東 王婕
1 概述
永磁同步電機的初級磁場與次級磁場的相互作用產生電磁轉矩,只有在轉子以同步速運行,即初級磁場與次級磁場相對靜止時才能產生有效的電磁轉矩。假設永磁同步電機剛啟動時,直接通以額定頻率與幅值的交流電,此時定子磁場靜止,轉子磁場是以同步速前進的圓形磁場,轉子磁極所受電磁推力每半個周期變化一次,一個周期平均電磁推力為零,永磁同步電機無法實現自啟動。啟動前獲得轉子實際位置的是永磁同步電機實現矢量控制的必要條件。
目前工程上常用的啟動方法有開環啟動法、絕對位置法、固定矢量電流法、絕對位置法、霍爾磁極檢測法、轉子位置觀測器法、高頻注入法、脈沖信號注入法等。開環啟動法不需要額外的硬件,但它無法實現最大轉矩啟動;絕對位置法具有較高的精度,但對硬件要求比較高,增加了硬件成本,通用性不高。固定矢量電流法簡單易行,但是在高精度控制場合,尤其是在電機正常運行之前不允許電機轉子存在角位移的場合時無法適用。
2 轉子初始位置檢測原理
根據永磁同步電機在 d-q 坐標系下的數學模型,永磁同步電機在 d-q 坐標系下的電壓方程為:

式中:ud、uq為 d、q 軸方向電壓; id、iq為 d、q 軸方向電流;Ld、Lq為 d、q 軸電感;rs為定子內阻;p為微分算子;ψr為轉子永磁體磁鏈;ω為轉子角速度。
轉矩方程為:

運動方程為:

其中:Te為電磁轉矩;TL為負載轉矩;ωr為轉子角速度;np為電機極對數;J為電機轉動慣量;B為阻尼系數。
對于表面式永磁同步電機,Ld=Lq,于是轉矩方程為:

當 d、q 軸電流參考值確定、坐標變換角度確定,變頻器就能在 d-q 坐標系下輸出一個幅值、方向確定的電流矢量,假設電機轉子初始角度為θ,當給定子電流施加幅值為is,方向為θt的電流時,此時電機轉矩可寫為:

表1:UVW狀態與轉子電空間對應表

電機啟動時,ωr=0,則運動方程可寫為:

若給定定子電流幅值大小足夠,可以滿足當0<θt-θ<π時,Te-TL>0, 電機逆時針轉動; 當-π<θt-θ<0 時,Te-TL<0,電機順時針轉動;當θt-θ=0或θt-θ=π,電機不轉;由此不斷試探,通過電機轉子的轉動方向判斷轉子初始位置。
3 永磁同步電機轉子初始位置檢測及實現
本文采用霍爾磁極檢測法方案,該方案在轉子微小轉動的基礎上便可以實現轉子初始位置的準確定位,實現接近負載咬合啟動。硬件成本低、效率高,是一種較為理想的方案。
霍爾磁極檢測器的的UVW三相信號用來檢測磁極位置,首先粗略估計出轉子磁極當前的位置,使電機咬合負載啟動,然后電機運行過程中通過檢測光柵編碼器的Z信號進行校正。
磁極霍爾檢測元件輸出的UVW信號在每一個360°電空間,UVW信號按所對應的狀態將該空間分成6份,每份空間對應電信號的60°區間,在6個不同的狀態空間,對應的UVW的信號狀態分別為001、010、011、100、101、110。則在系統初始帶電時,由UVW狀態可以判斷轉子處在哪個空間。
利用對拖法觀測轉子U相反電動勢與UVW三相輸出信號的波形,繪制如圖1所示。
從圖1可以看出UVW狀態與轉子電空間對應關系如表1所示。
現在假設判斷UVW的初始狀態為100,即轉子位于空間0°~60°電空間,為實現矢量控制,假設轉子位于30°位置,交軸電流應該在120°位置。轉子可能是處在0°~60°電空間的任意位置,按照30°位置的假設可能產生以下兩種極限情況:假設轉子處于0°位置,此時假想交軸電流超前d軸120°;假設轉子處于60°位置,此時假想交軸電流超前d軸60°。
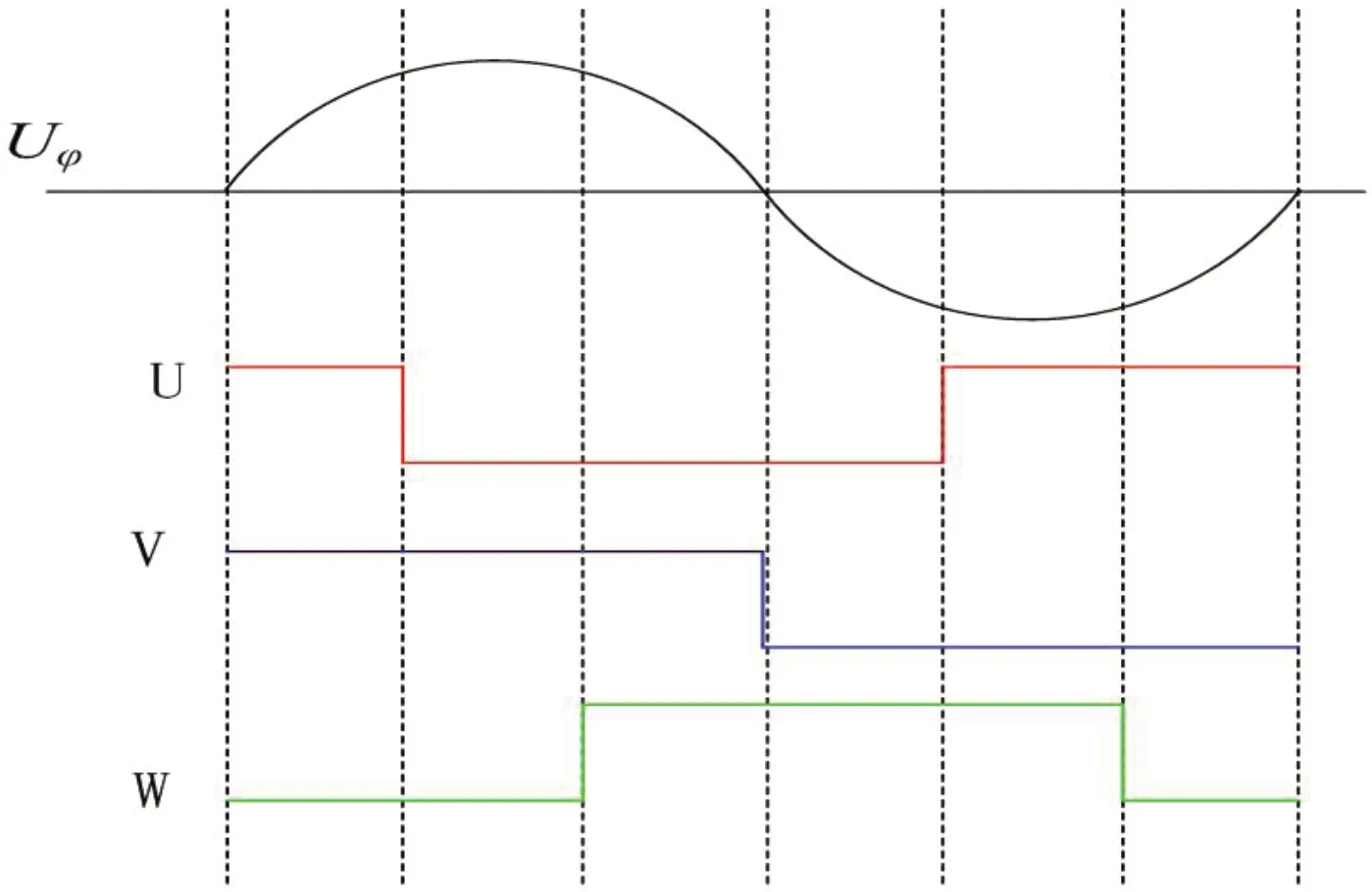
圖1:U相反電動勢與UVW三相信號波形
不管轉子真實狀態位于0°~60°空間的哪一點,按照前面假定給120°方向的交軸電流均可以使電機產生正向的電動力。電機在正向電動力的作用下正向運動,初始定位時,速度的設定值SpeedRef=0,此時速度反饋信號與設定值作用在速度調節器又使電機產生反向運動的電流,該電流與前面所假想的交軸電流反向。在上述過程中,電機轉子將在交替施加的超前、滯后(對d軸)交軸電流的作用下處微振狀態,最終實現定、轉子的咬合,咬合狀態的結束標志此時定子磁場與轉子磁場的磁鏈的矢量積所決定的推力恰好可以帶動負載,即可實現帶啟動,但此時控制系統并不知道轉子的具體位置,此時假想的交軸電流與電機轉子直軸并不一定成90°角,故此時仍算不上矢量控制。接下來給電機運動的速度指令,等控制器接收到零位脈沖時,系統對計數脈中做一次修正,使計數脈沖真實表示轉子的實際位置,此后電機運行便完成定位,進入真正的矢量控制。
3 總結
本文詳細闡述了基于霍爾磁極檢測法對永磁同步電機初始位置檢測及啟動方法,硬件成本低、效率高,為基于永磁同步電機對拖動系統與伺服系統工程研究提供了方案。
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
數學物理學報(2022年1期)2022-03-16 06:14:50
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
中學生數理化(高中版.高考數學)(2017年3期)2017-05-04 07:15:09
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
電子制作(2016年1期)2016-11-07 08:42:44
Coco薇(2016年1期)2016-01-11 16:53:24
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:23