汽車用車載終端的標準的綜述
2019-10-08 08:48:51吳詩宇潘力溧楊浩
汽車科技 2019年4期
吳詩宇 潘力溧 楊浩

摘? 要:現代汽車往大數據方面發展,汽車用車載終端是基礎硬件。國家相關部門在自身的角度上發布了一些標準,這些標準互相有存在某些共通點。本文對車載終端的主要標準進行了綜述,并歸納總結出了同時滿足各種標準的方法,為各廠家設計車載終端提供了參考。
關鍵詞:大數據;車載終端;標準綜述;解決方案
中圖分類號:U467.3? ? 文獻標識碼:A? ? 文章編號:1005-2550(2019)04-0002-04
Abstract: With the development of modern automobile to big data, vehicle terminal is the basic hardware. Relevant national departments have issued some standards from their own point of view, which have some common points with each other. In this paper, the main standards of on-board terminals are summarized, and methods to meet various standards at the same time are summarized, which provides a reference for manufacturers to design on-board terminals.
1? ?引言
在過去的十年內,大數據開啟了一個令人激動的全新時代。結構性和非結構性數據大量涌現,這些數據本身蘊藏了巨大的價值。各大汽車制造商早已瞄準大數據這一寶藏,重新構建企業核心競爭力和品牌影響力。而政府及相關機構為了規范汽車行業市場行為,更好的實現管理職能,也要借力于車聯網大數據這個工具[1]。
車載終端又叫T-BOX,是把車輛信息傳輸到遠程服務平臺的車載部件,是車聯網大數據系統的關鍵組成部分。其通信協議的符合性、產品的可靠性,都最終影響著整個汽車大數據系統[2]。
為了更好的滿足政府及行業的大數據需求,引導汽車行業健康發展。國家相關部門及機構針對車載終端,從自身的角度發布了一系列產品技術要求及試驗方法的檢測標準。
首先,交通運輸部發布了JT/T 794-2011《道路運輸車輛衛星定位系統車載終端技術要求》[3]、JT/T 1076-2016《道路運輸車輛衛星定位系統車載視頻終端技術要求》[4]。
其次,北京理工大學牽頭制定了GB/T 32960.2-2016《電動汽車遠程服務與管理系統技術規范第2部分:車載終端》[5]。
其三,生態環境部發布了GB 17691-2018《重型柴油車污染物排放限值及測量方法(中國第六階段)》[6]。
以上標準在產品技術要求上,存在不同程度的重疊。詳細解讀如下。
2? ?JT/T 794-2011 與JT/T 1076-2016
JT/T 794-2011《道路運輸車輛衛星定位系統車載終端技術要求》,定義了普通的具有衛星定位功能的車載終端的技術要求。用于代替GB/T 19056-2012《汽車行駛記錄儀》。
而JT/T 1076-2016《道路運輸車輛衛星定位系統車載視頻終端技術要求》,在JT/T 794-2011 的基礎上,增加了音頻和視頻功能的技術要求。
JT/T 794-2011 用于普通營運車輛,而JT/T 1076-2016 的視頻車載終端目前多用于“兩客一危”的營運車輛,用于監控駕駛員行為和車內狀況。
電氣性能方面,JT/T 794-2011 與JT/T 1076-2016 完全一樣。要求如下:
終端內具有電池,并能獨立工作10min;
終端能在寬電壓范圍工作,適應反接電壓、過電壓;
終端在斷電后,能保存數據15天;
終端應具有防止蓄電池虧電的切換功能。
高低溫環境適應性方面,JT/T 794-2011 與JT/T 1076-2016 完全一樣,都是要求-40℃~85℃下儲存,-20℃~70℃下正常工作。電磁兼容性也完全一樣,都是要求靜電放電抗擾和抗車輛點火干擾。
機械適應性方面,JT/T 794-2011 與JT/T 1076-2016 存在較大不同。區別如下表1 所示。
大量的試驗證明,JT/T 1076-2016 帶上了硬盤,并進行了通電。機械適應性試驗條件比JT/T 794-2011 更加嚴格。
另外,通信協議方面,都按JT/T 808-2013《道路運輸車輛衛星定位系統終端通訊協議及數據格式》[8]。
3? ?GB/T 32960.2-2016
GB/T 32960.2-2016《電動汽車遠程服務與管理系統技術規范第2部分:車載終端》,定義了電動汽車的車載終端的技術要求,主要功能只是把整車的CAN信息轉換成無線網絡信息(3G或4G)。
電氣性能方面,除了JT/T 794-2011的,還增加了電壓緩升緩降的測試,從大量測試結果看出,這項測試的通過率高,集成車載終端滿足的難度不大。
高低溫環境適應性方面,要求-40℃~85℃下儲存,-30℃~70℃下正常工作。低溫工作比JT/T 794-2011 低了10℃,并增加了溫度梯度和濕熱循環等試驗,要求變高。電磁兼容性方面要求加嚴,增加了傳導抗擾度、發射抗擾度、輻射抗擾度、輻射發射和傳導性能等測試。可靠性方面,并增加了5年的壽命加速試驗。
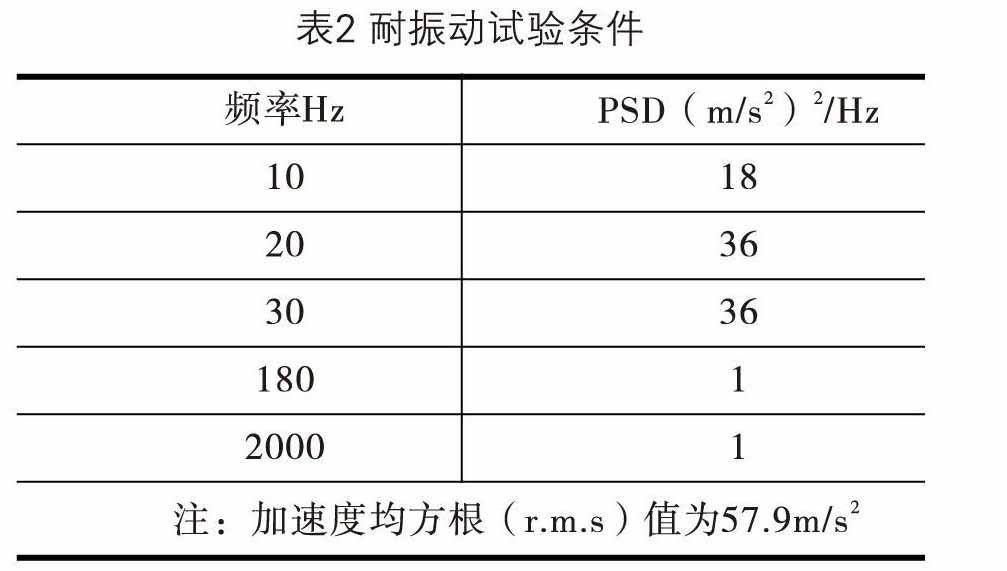
機械適應性方面,按照GB/T 28046.3-2011《道路車輛電氣及電子設備的環境條件和試驗第3 部分:機械負荷》[9]執行。首先要求進行三綜合的32h 的隨機振動,試驗條件如下。
從上表看出,相比于JT/T 1076-2016,耐振動試驗條件加嚴較多。耐沖擊試驗條件變化不大。
通信協議方面,與JT/T 794-2011 和JT/T 1076-2016 完全不同,采用GB/T 32960.3-2016《電動汽車遠程服務與管理系統技術規范第3部分:通信協議及數據格式》[10]。
4? ?GB 17691-2018
GB 17691-2018《重型柴油車污染物排放限值及測量方法(中國第六階段)》的發布是近年來汽車行業的熱門事件。標準中附錄Q,規定了遠程排放車載終端的技術條件和通信數據格式。數據格式上,相比于GB/T 32960.3-2016,增加了OBD 數據和發動機數據;技術條件上,增加了網絡安全檢測,其他與GB/T 32960.2-2016 一致。
另外,此標準6.12.4中規定“從6a階段開始,車輛應裝備符合附錄Q要求的遠程排放管理車載終端,鼓勵車輛按本標準附錄Q要求進行數據發送。從6b階段開始,生產企業應保證車輛在全壽命期內,按本標準附錄Q要求進行數據發送,由生態環境主管部門和生產企業進行接收”。規定了標準的過渡期,避免了“一刀切”。
可以看出,GB 17691-2018相比于新能源汽車的車載終端標準,只是改變了軟件協議。與GB/T 32960.2-2016可以實現硬件通用。
5? ?解決方案
如何設計終端使其同時滿足多個標準,需要做如下硬件方面的設計。
硬件上應具備支持GPS 和北斗的雙模定位解碼模塊;為了實現斷電后10min 的獨立運行,終端內應具備鋰電池;
為了保證能在-30℃~70℃下工作,并在-40℃~85℃存儲,所有芯片應選用工業級的。并保證鋰電池在-30℃下的電量能獨立運行10min;
車載終端為了實現視頻監控的功能,必須具備內置或外置的硬盤。硬盤通過JT/T 1076-2016 的通電500Hz 隨機振動試驗;
而普通硬盤無法通過2000Hz 的3個方向32h 隨機振動,電動汽車的車載終端不要求儲存視頻,采用SD卡或CF卡的方式內置在終端內。電動汽車終載不帶硬盤,通過2000Hz的隨機振動;
車載終端需要通過濕熱循環的試驗,車載終端的防護等級要達到耐濕熱的嚴酷度。而要考慮散熱,此類部件外殼都有一些散熱孔,不利于防護。建議廠家在部分電路板層級做好防水;
為了實現乘用車、小型商用車和大型商用車的通用,電源芯片采用9V~36V的寬范圍輸入,同時也滿足了過電壓。另外為通過反向電壓試驗,電源側加入了正向二極管,避免了反向電源擊穿電路;
為了通過傳導抗擾度、發射抗擾度、輻射抗擾度、輻射發射和傳導性能等EMC測試,就需要在信號線和電源線入口處上做更好的屏蔽和接地設計。針對電源輸入側,電路上設計多級濾波電路,通過寬范圍的電源芯片后,再進行濾波。電路板的接地,也采用多規格的電容和零歐姆電阻組合接地的方式;
硬件層級,設計更多的接口,針對不同的應用,插上不同的設備,實現不同的功能。比如要實現視頻車載終端的功能,就要插上攝像頭、硬盤,啟動終端內圖像辨識的模塊。如果只是實現電動汽車傳輸數據的功能,接上整車CAN線和電源即可;
為通過振動試驗,車載終端外部連接器采用防松、防誤插的形式。連接器與電路板之間建議采用插針焊接的方式。電路內結構上采用多點支撐的方式,并進行利用振動臺進行固有頻率的掃描,在設計階段就防止在2000Hz以下出現的共振。建議廠家在開模設計之前,就進行固有頻率的仿真或試驗,防止磨具的浪費;
而沖擊試驗就是大加速度的短時脈沖,主要考核電路板固定方式和終端外殼的強度,此試驗與帶電跌落試驗類似,廠家可自行用跌落試驗進行前期的研究或設計驗證。
通信軟件方面,底層協議一直都是基于TCP的,應用層協議存在一定差別。
如果采用JT/T 808-2013,更多是遠程平臺對終端發命令,終端執行命令并返回狀態;與此同時,終端不斷地進行主動安全和駕駛員監控的運算,并把運算結果存儲在本地,或必要時發送到遠程平臺。單次有效通信的數據量更大,多采用4G的通信方式。
如果采用GB/T 32960.3-2016,只需要把整車CAN 線上的數據和定位實時發給遠程平臺即可,主要實現平臺對整車運行狀態的實時監控,要求10s上傳一次數據,單次有效通信的數據量小,但更頻繁,本采用3G即可滿足需求。但考慮到3G網絡的逐步淘汰和JT/T 808-2013要求的4G,車載終端和平臺的通信方式建議采用4G。
從這2個主管部門制定的通信標準可以看出,交通部更看重的是道路的交通安全;工信部看重的是對新能源汽車的宏觀大數據管理和監控。為了滿足這2個主管部門的述求,建議車載終端通過4G網絡進行JT/T 808 和GB/T 32960.3的數據混合發送,并可發送到不同的IP地址上。并預留5G接口,為以后支持5G,升級產品做好外觀和結構上的準備,節省開模和結構設計費用。
并建議在終端內設計遠程升級的功能代碼。如果軟件協議更換了新的標準或IP地址更改,可通過固件遠程升級的方式實現。這樣避免了后期終端裝車后,需要現場進行軟件升級的麻煩,有助于減少售后與運營成本。
行業內相關標準所,也可以根據不同部門發布的標準,整理得到車載終端的統一國家標準。實現不同主管機構的標準統一,統一后終端檢測和認證,只需要按一個標準執行即可,既滿足了不同主管機構的述求,又實現了對終端廠家的減負和扶持。
6? ?結語
根據以上的解讀和歸納。各車載終端廠家,可以根據自身產品的特點,建立滿足多種標準的產品系列,去應對不同整車廠的要求,減少檢測與認證成本。整車也可以對車載終端進行家族化管理,減少售后與運營成本。
本文對車載終端相關標準的解讀和歸納為各廠家設計車載終端提供參考。
參考文獻:
[1]鐘文京,尹文斌. 新能源汽車大數據庫的設計分析[J].電子技術與軟件工程,2016(22):162-163.
[2]Tao Chen,Serge D. Willenegger. Multi-media broadcast and multicast service(MBMS) in a wireless communication system[J]. IEEE journal of Qualcomm Incorporated,
2013,4(1):14-16.
[3]JT/T 794-2011. 道路運輸車輛衛星定位系統車載終端技術要求[S].北京:人民交通出版社股份有限公司,2011.
[4]JT/T 1076-2016. 道路運輸車輛衛星定位系統車載視頻終端技術要求[S].北京:人民交通出版社股份有限公司,2017.
[5]GB/T 32960.2-2016. 電動汽車遠程服務與管理系統技術規范第2 部分:車載終端[S].北京:中國標準出版社,2016.
[6]GB 17691-2018. 重型柴油車污染物排放限值及測量方法(中國第六階段)[S].北京:中國標準出版社,2018.
[7]GB/T 19056-2012. 汽車行駛記錄儀[S].北京:中國標準出版社,2012.
[8]JT/T 808-2011. 道路運輸車輛衛星定位系統終端通訊協議及數據格式[S].北京:人民交通出版社股份有限公司,2013.
[9]GB/T 28046.3-2011. 道路車輛電氣及電子設備的環境條件和試驗第3部分:機械負荷[S].北京:中國標準出版社,2011.
[10]GB/T 32960.3-2016. 電動汽車遠程服務與管理系統技術規范第3部分:通信協議及數據格式[S].北京:中國標準出版社,2016.
猜你喜歡
儀器儀表用戶(2022年4期)2022-04-01 03:17:14
閱讀與作文(英語初中版)(2021年8期)2021-09-13 02:16:29
新聞世界(2016年10期)2016-10-11 20:13:53
科技視界(2016年20期)2016-09-29 10:53:22
中國記者(2016年6期)2016-08-26 12:36:20
數字通信世界(2015年10期)2015-12-21 12:22:54
母子健康(2015年1期)2015-02-28 11:21:44
自動化博覽(2014年10期)2014-02-28 22:33:42
明星時代(2004年8期)2004-04-12 00:00:00