基于大數據技術的汽車制動策略研究
2019-10-08 08:48:51龔春忠胡建國張永何浩
汽車科技 2019年4期
關鍵詞:大數據
龔春忠 胡建國 張永 何浩
摘? 要:汽車制動技術發展迅速,可能量回收式制動方式已在眾多混合動力汽車和電動汽車上得到應用。隨著智能網聯汽車技術的發展,結合大數據挖掘,可以進一步優化制動能量回收技術,以實現出行過程更節能、更安全、更舒適的目的。將本文所提的制動方法應用到NEDC工況續駛里程測試中,續駛里程提高了3.26%。
關鍵詞:大數據;汽車制動策略;能量回收
中圖分類號:U461.3? ? 文獻標識碼:J? ? 文章編號:1005-2550(2019)04-0006-04
Abstract: Vehicle braking technology is developing rapidly, and energy recovery braking mode has been applied in many hybrid electric vehicles and electric vehicles. With the development of Intelligent Network vehicle technology, combined with large data mining, braking energy recovery technology can be further optimized to achieve more energy-saving, safer and more comfortable travel process. The braking method proposed in this paper is applied to the NEDC driving range test, and the driving range is increased by 3.26%.
汽車制動技術是汽車關鍵技術之一。圍繞著安全主題,出現了提高輪胎性能、制動盤性能、發動機輔助制動、點剎制動策略等技術手段。出現電動汽車和混合動力汽車之后,開始圍繞著節能主題,提出了能量回收技術,依次出現以電機效率為主要依據的最優能量回收效率策略[1],以汽車疊加式或協調式制動策略為研究主題的能量回收技術[2]。圍繞著能量回收技術也產生了很多能量回收的測試方法[3]。汽車制動策略的研究已成為節能技術的重要突破方向。
本文的研究對象是純電動汽車的制動策略,引入了駕駛員駕駛習慣因素,結合智能網聯大數據系統,研究新的制動策略不僅考慮安全和節能指標,還考慮提高駕駛舒適性的指標。
1? ? 汽車制動技術的發展
傳統燃油車上的制動系統通常是機械制動,在下長坡或非緊急制動時,可通過降檔令發動機參與制動作用。根據制動器不同,可分為鼓式、碟式和盤式制動器。為了進一步提高制動性能,電控系統引入了點剎模式,即防抱死制動系統。但傳統的制動方式都是將車輛的動能轉換為剎車片的熱能,為了減少制動片因過熱而失效,引入了發動機輔助制動。尤其是下長坡時,不建議駕駛員掛空擋踩制動,而是通過降檔方式令發動機提供一定的制動力[4]。
隨著汽車技術的發展,出現了混合動力汽車或純電動汽車,車上有了蓄電池或超級電容等儲能單元,為了降低汽車的能量消耗率,出現了可能量回收的制動技術。但最初的制動方式是在制動過程中,電機和機械制動盤同時參與制動過程,該方法相當于在制動軸上增加了一個發電機,兩者不能聯動,因此稱為疊加式制動方式。為進一步提高能量回收的效率,就要減少能量在機械制動器上的能量損耗,通過制動踏板的解析,提出了發電回收優先,機械制動力補足的方式進行能量回收,此時可以聯動控制電機和制動器的制動工作,因此被稱為協調式制動方式。
目前,協調式制動方式是能量消耗率相對較優的制動方式。隨著大數據技術的發展,挖掘駕駛員的駕駛習慣數據,為駕駛員提供可自定義或量身定制的最優制動方案,將可以進一步發揮協調式制動方式的節能性能。
2? ? 基于大數據的制動工況采集
目前,汽車網聯化已列入強制執行標準,《GB/T 32960電動汽車遠程服務與管理系統技術規范》[5~7]中規定了車輛需要上傳到云端的數據。因此,汽車的大數據資源已經存在,如何將其利用,是當前需要研究的重要課題。
提取汽車的車速數據,對駕駛員的制動習慣進行分析,從而定制化設定制動策略,對提高駕駛舒適性、安全性、節能環保性均有積極的意義。
2.1? ?制動工況t-v譜
駕駛員通過加速踏板和制動踏板控制車速。以某電動汽車在浙江省桐鄉市二環路行駛數據為例,獲得如圖1所示的t-v工況圖。將制動的工況單獨提取,獲得如紅色點所示的制動工況。
2.2? ?制動工況v-a譜
將t-v曲線進行濾波后,速度對時間做微分,得到近似加速度。將制動的工況繪制成v-a軌跡圖,則獲得如圖2所示的軌跡。
可以發現,不同車速下的汽車制動呈一定的規律分布。計算各車速的平均減速度,則得到如圖2中紅線所示結果。
3? ? 制動規律的提取與擬合
車速與減速度的關系反映了駕駛員制動工況的習慣,與駕駛員的習慣以及當地的路況相關。但統計出來的平均減速度是不平滑的曲線。或者需要非常大量的統計數據作為分析的基礎,與路況的時效性構成一對矛盾。因此,本文采用高次曲線擬合法將制動分布做平滑處理。
如圖3所示,將曲線擬合成如式(1)4次曲線:
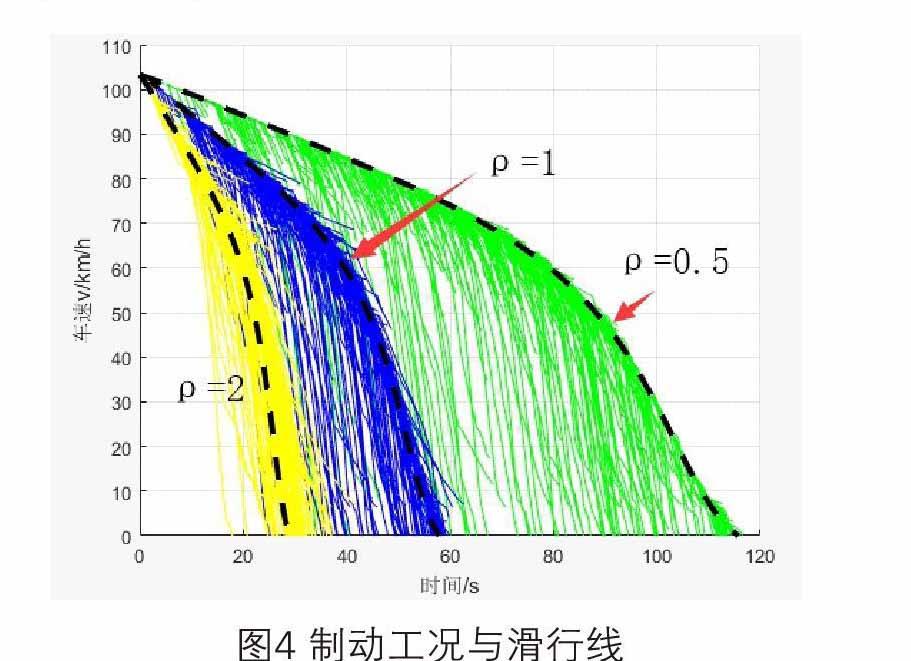
式中,ρ 是比例系數。 ρ =1時滑行線代表著平均制動強度下的曲線,ρ =2時滑行線代表著制動力是平均制動強度的2倍,ρ =0.5時滑行線代表著制動力是平均制動強度的0.5倍。 ρ 越大說明制動強度越大。
解該積分方程,即可獲得汽車滑行線。本文采用積分方程的數值解法。將滑行線與各制動工況相結合,結果繪制如圖4所示。
當汽車使用疊加式制動能量回收時,比例系數 越大越節能,代表著駕駛員松加速踏板后踩下制動踏板前,能有更多的汽車動能回收到儲能裝置中,在制動力矩分配上,分配給電機發電的力矩更大。但是 越大,駕駛舒適性會越差,車輛有急減速的感覺,也不利于安全駕駛。
當汽車使用協調式制動能量回收時,比例系數 ρ 越小越節能,代表著駕駛員松加速踏板后踩下制動踏板前,能有更多的能量直接轉換為里程,即便踩下制動踏板,若不是急減速,制動盤也不會介入,這樣盡可能多地將汽車輛動能轉換為儲能裝置電能。但 ρ 太小會導致汽車相對于傳統燃油車而言,失去了發動機制動的感覺,趨近于開燃油車直接掛空擋滑行,這也不利于安全駕駛。
因此,比例系數 ρ 應當調整適中,在節能、安全、舒適之間找平衡點。該參數可開放給駕駛員,默認設定一個值為0.5,駕駛員可綜合衡量節能性、舒適性和安全性做自定義調整。
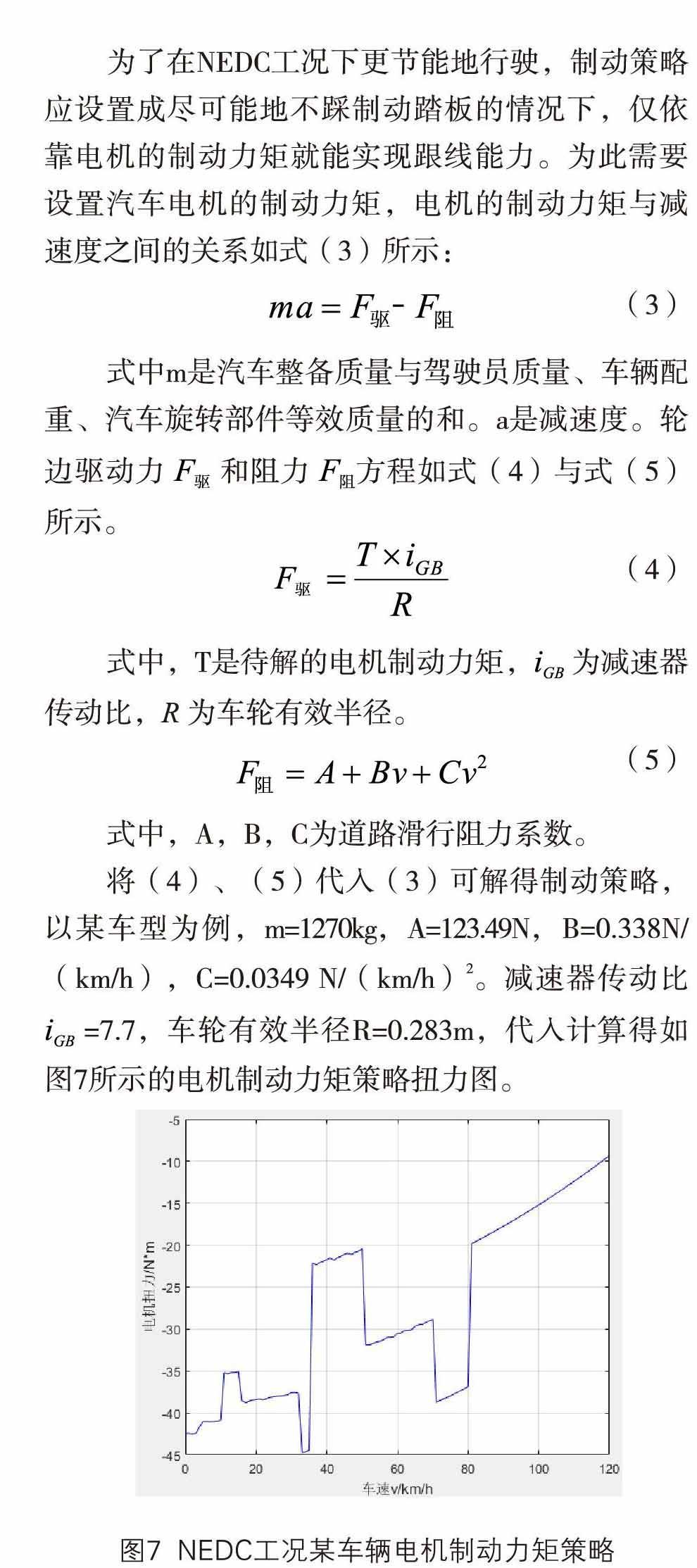
4? ? 該方法在NEDC工況中的應用
《GB/T 18386-2017 電動汽車能量消耗率及續駛里程試驗方法》[8]中規定了工況法測試車輛的續駛里程與能量消耗率。引用歐洲的NEDC(New Europe Drive Cycle)工況。將制動工況單獨提取并按照2.2節的方法求算出各車速下的平均減速度,結果如圖5所示。
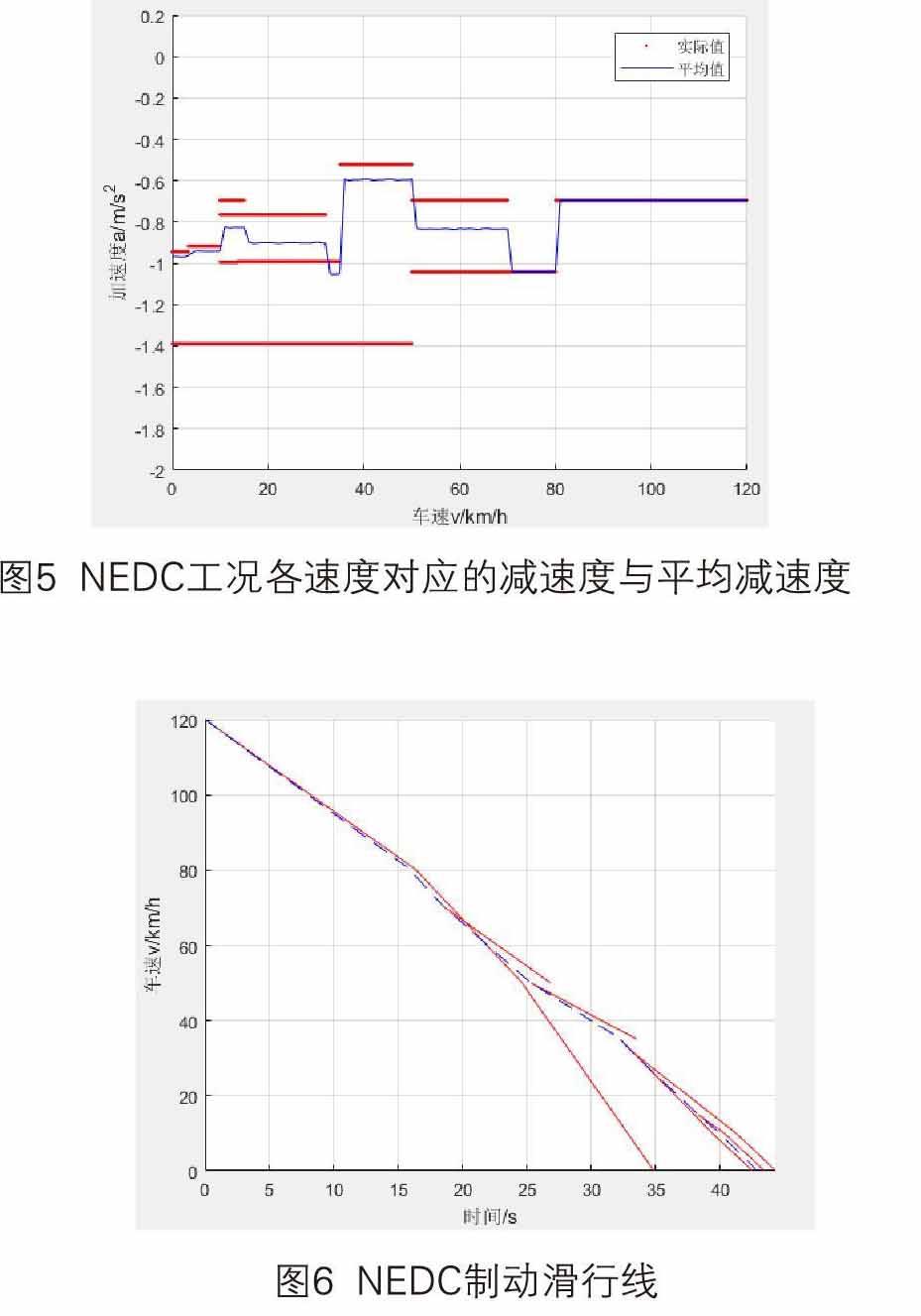
該工況規定的制動部分是重復固定的,因此其規律性很強,不需要做如第3節中所述的平滑處理。圖5中的平均減速度用 ρ=1 的制動強度,解出如圖6所示的制動滑行曲線。與NEDC工況的制動曲線相比可知,該制動曲線貼近大部分的制動工況。
該車型實際測試時,使用疊加式制動策略續駛里程為337km;使用本文所示方法制動策略時,續駛里程為348km。續駛里程提升了3.26%。
5? ? 結 論
汽車的制動能量回收的改進,對提高駕駛安全性、舒適性、節能性均有重要的意義。結合大數據分析做出的制動策略,提供給駕駛員自定義的能量回收參數設置接口,有利于在駕駛員出行的安全性、舒適性、節能性中尋找平衡點。該課題作為電動汽車能量回收技術的輔助方案,具有較高的應用價值。
參考文獻:
[1]盧東斌,歐陽明高,谷靖,李建秋. 電動汽車永磁同步電機最優制動能量回饋控制[J]. 中國電機工程學報,2013,33(03):83-91+12.
[2]孫宏達. 純電動汽車再生制動控制系統的研究[D].哈爾濱理工大學,2016.
[3]初亮,蔡健偉,富子丞,王彥波. 純電動汽車制動能量回收評價與試驗方法研究[J]. 華中科技大學學報(自然科學版),2014,42(01):18-22.
[4]龔金科,顏勝,黃張偉,賈國海. 發動機輔助制動性能仿真研究[J].中國機械工程,2014,25(09):1268-1272.
[5]GB/T 32960.1-2016,電動汽車遠程服務與管理系統技術規范 第1部分:總則[S].
[6]GB/T 32960.2-2016,電動汽車遠程服務與管理系統技術規范 第2部分:車載終端[S].
[7]GB/T 32960.3-2016,電動汽車遠程服務與管理系統技術規范 第3部分:通信協議及數據格式[S].
[8]GB/T 18386-2017,電動汽車能量消耗率及續駛里程試驗方法[S].
猜你喜歡
中國市場(2016年36期)2016-10-19 04:41:16
中國市場(2016年36期)2016-10-19 03:31:48
中國市場(2016年35期)2016-10-19 01:30:59
商(2016年27期)2016-10-17 06:26:00
今傳媒(2016年9期)2016-10-15 23:35:12
今傳媒(2016年9期)2016-10-15 22:09:11
新聞世界(2016年10期)2016-10-11 20:13:53
科技視界(2016年20期)2016-09-29 10:53:22
中國記者(2016年6期)2016-08-26 12:36:20