電纜隧道中巡檢機器人實現及應用
2019-10-09 05:48:26陳杰楊朝賀子琦張譽侯旻嵩
電子技術與軟件工程 2019年17期
關鍵詞:環境
文/陳杰 楊朝 賀子琦 張譽 侯旻嵩
隨著城市電纜隧道的普及和發展,電纜隧道的安全隱患也將越來越大,電纜故障將進入一個高發期階段,因此,迫切要求解決電纜隧道的安檢問題。通過人工智能所制造出來的仿生機器人,可以替代人類去完成一些復雜工況下的工作任務,在降低人們生命安全隱患的同時還能有效提升工作效率。在電力工程中,電纜隧道巡檢機器人則是專門針對地下電纜隧道設計研發的智能一體化巡檢方案。本文針對國內電纜隧道發展的現狀,結合巡檢機器人的機械結構和工作性能優勢,重點分析了巡檢機器人在導航定位、通訊和故障排查方面的優勢,并且通過實際應用,驗證了巡檢機器人在狹小空間內的通過性能、可控制云臺的靈活性能以及無線通信系統的穩定性能等。在長時間的使用過程中,巡檢機器人可以輕松適應電纜隧道的各種復雜環境,滿足日常的巡檢任務,為后續的進一步研究奠定了理論和實驗基礎。
1 智能巡檢機器人原理及關鍵技術
電纜隧道巡檢機器人主要針對隧道的特殊環境,對滲水、電纜老化、腐蝕以及破損等現象進行精準定位,并發送故障報警。通過巡檢機器人不僅可以有效降低人工操作帶來的風險,還能提升工作效率,確保電能輸出的穩定性和可靠性。下文對巡檢機器人實現原理及關鍵技術進行闡述:
1.1 控制結構
本文研究的巡檢機器人具備靈活的控制系統,主要由遠程主機、數據采集系統以及主控制板三個部分組成,采用鎂鋁合金加工而成,整體重量小于10kg,整體封閉的殼體設計保證了巡檢機器人具有一定的防水和涉水能力。巡檢機器人遠程主機為用戶提供良好的交互界面,顯示巡檢機器人采集到的各種數據信息,同時用戶端也可以通過無線通信系統完成對巡檢機器人的手動控制。主控制板包含巡檢機器人的各種運行器件,例如:處理器完成對巡檢導航和電機控制,完成數據傳輸等任務,數據采集系統則是集成有害氣體、煙霧、光照度、溫濕度等傳感器以及定位裝置,利用無線通信系統對傳感器獲取的數據信息進行處理,并將處理結果發送至主控制板,組成架構如圖1所示。
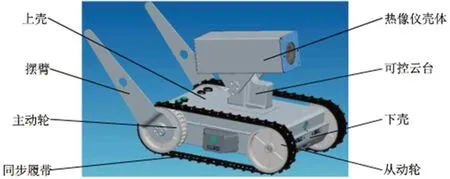
圖1:巡檢機器人架構示意圖
1.2 驅動結構
巡檢機器人整體采用輕量化設計,采用性能好、密度小的材料制作降低工作重心,再配合復合越障機構設計的方式,操作簡單、越障性能高,配備擺臂支撐可以輕松翻越隧道中的障礙物,并且能夠沿著電纜線行走,可控云臺搭載高清攝像機及紅外熱成像儀,可以輕松實現電纜隧道內的實時監控與紅外熱成像。
1.3 定位系統
定位系統是巡檢機器人的基本功能,通過導航定位系統確定巡檢機器人在隧道中的位置,對準確表示電纜線路的故障點具有重要意義。現階段,常用的定位系統有測程定位、主被動標識定位、GPS定位等。同時,導航定位也可以規劃出巡檢機器人的行走路線。電纜隧道結構復雜,巡檢機器人的行走路線需要跨越多種障礙物,所以必須借助導航定位系統規劃最佳的行走路線,巡檢機器人配備視覺傳感器,可以獲取電纜隧道內的環境信息進行導航定位工作,具有較高的空間和灰度分辨力、探索范圍更廣、定位精度更高,能夠幫助巡檢機器人制定科學的巡檢路線。
1.4 故障排查系統
電纜隧道巡檢機器人具備更加智能化的故障排查系統,包括視覺檢測和紅外技術探測。根據電纜隧道特殊的環境要求,通過分析整個工作過程,設計智能化的控制系統,確定巡檢機器人與后臺控制器之間的信息互聯,利用Lab VIEW編程軟件實現巡檢機器人和用戶端實時圖像顯示、無線傳輸和接收等功能。
2 電纜隧道巡檢機器人的運用
電纜隧道環境復雜特殊、通風效果較差,由于線路長時間負荷運行,容易產生自然老化、腐蝕或者遭受生物啃噬引發電纜隧道火災,再加上維修人員難以進入隧道內進行巡檢,一旦發生火災,火勢蔓延速度和范圍將更加難以控制,如果不能在第一時間進入火災現場控制火勢,將會引發更嚴重的停電事故,后續的修復工作也更加困難,造成的經濟損失和社會損失也將是無法估量。此時,電纜隧道巡檢機器人就發揮了其自身的優勢,可以及時、準確的提供電纜火災發生的位置,并且自身配備小型干粉滅火裝置,當環境溫度上升至設定值時,電纜隧道巡檢機器人通過通訊系統,接收遠程管理平臺以及本地中心管理平臺的控制指令,然后獲取指令控制發射超細滅火干粉進行滅火。同時,還可以對老化、腐蝕以及遭受啃噬的部位進行定位和修復,提高電纜線路使用壽命的同時還能有效降低火災對電纜線路造成的破壞。
此外,為了確保電纜巡檢機器人在復雜環境中安全、穩定的運行,巡檢機器人的控制程序所發的各種指令都是在無線網絡環境下進行的,通過后臺控制器和巡檢機器人系統中的無線網卡,可以建立兩臺計算機之間的無線網絡連接。針對控制系統要求,搭建基于Lab VIEW軟件,設計客戶端和服務器之間的無線通訊軟件,實現圖像信息的實時采集、無線傳輸等功能。電纜隧道巡檢機器人配備高帶寬、抗干擾能力強、傳輸距離遠的通訊模塊,能夠將電纜線路實時視頻圖像信息傳輸至用戶端。隧道巡檢機器人設計生產完后,為了進一步驗證巡檢機器人結構和功能的合理性以及可靠性,需要對其進行爬坡、翻越以及無線通訊等多方面的試驗分析,本文研究的電纜隧道巡檢機器人通過動力學和運動學試驗,驗證了其可以適用于電纜索道或者管道等復雜的封閉環境,可以有效地規劃爬坡、翻越障礙的路線,明確驅動電機的工作指令,為機器人在電纜隧道環境中順利巡檢做好準備。
3 總結
綜上所述,伴隨著人工智能技術的不斷發展和日趨成熟,運用仿生學原理設計的巡檢機器人,已經可以有效替代人工完成一些特殊環境下的安全排查工作。本文研究的電纜隧道巡檢機器人具有高機動性,能夠輕松穿越復雜的障礙,進行電纜線路的維護工作,同時具有優越的無線通訊技術,便于遠程操控。在城市化高速發展的今天,土地資源稀缺,電纜隧道的密度越來越大,電纜維護的難度和工作量也與日俱增,因此,必須隧道中的電纜定期檢查維護,了解電纜運行情況及其周圍環境,及時發現并消除隱患,確保人們生產、生活用電的安全和穩定性,對智能巡檢機器人具有非常廣闊的應用前景。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環境監察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38
