醫用制氧機群智能控制系統設計與實現
2019-10-09 05:48:46周正左光群
電子技術與軟件工程 2019年17期
文/周正 左光群
對于醫用制氧機來說,其是物理制氧設備中較新的一種,不用其它的添加成分,僅與電源相連接,就能夠制造氧氣。現階段,對于醫用制氧機來說,基本都是以單機工作模式為主的,盡管自動化水平要高一些,然而其未對信息的遠傳功能進行檢測,護士站等是缺失的,使得監控制氧機工作是缺失的。
本文以無線網絡為依托,對醫用制氧機群智能化的實現進一步的深入探討,利用中央控制室來使其無線控制作用得以全面實現,使參數遠傳功能得以實現,例如氧氣流量等,從而能夠有效的管控一定范圍內的制氧機,這樣用戶使用氧氣的安全性會提升,使用更加便利,從而使其取代氧氣瓶的目標得以實現。
1 總體架構
基于無線網絡的醫用制氧機群是由無線網關和無線傳感器節點構成一個微型數據監控網絡,實時對醫用制氧機群運行狀態數據進行智能控制。將中央控制器有效的應用,從而可以控制、監控制氧機,同時將信息進行收集,利用無線通信,把數據向基站設備進行傳輸,同時自這一基站開始,把數據向其它設備進行傳送,利用網絡把數據向遠程控制中心進行傳送,在控制中心的計算機中對其實施統計分析,使遠程控制功能得以實現。由于傳感器的節點和靈活性。結合設備工作情況,對其實施自主設置,所以,這一系統的可擴展性十分突出。系統總體框架具體如圖1。
1.1 智能控制功能的實現
智能控制中心PC電腦有數據監控功能、參數配置功能、實時數據庫等多個功能模塊。利用無線網絡,使控制中心和醫用制氧化有機結合,利用接收模塊將制氧機的信息進行有效的接收,對其實施全面的分析,同時結合信息類型的不同,對其進行不同的處理,將控制指令向制氧化進行傳輸,完成對醫用制氧機相應的遠程操作,實現了醫用制氧機的全方位數據采集和監控。
1.2 遠程控制功能的實現
在控制中心的計算機中對數據進行收集、存儲。護士等相關人員能夠對服務器管理的制氧機的不同數據進行瀏覽,能夠對無線網絡中的不同制氧設備進行控制。若制氧機產生不正常情況時,能及時檢測到并采取相關措施。
1.3 無線監控網絡體系的實現
對于醫用制氧機來說,其網絡體系中主要是以無線網絡為主,在這之中,其最重要的一個就是Zigbee網關,其主要管理傳感器中的網絡節點,同時全面的管理制氧機設備的各個節點。
2 醫用制氧機群智能控制系統硬件核心模塊設計
在基于無線網絡的醫用制氧機群項目中,最核心的部分是低生產成本、技術成熟的解決方案,搭建起能實時通訊與控制的無線網絡。當前,市場上無線射頻收發芯片的類型越來越多,數量也不斷上漲,工作頻段也有很多,例如2.4GHz、43MHz, 968MHz等。現在,很多大企業都集中精力對2.4GHz的Zigbee芯片進行研發。通過多種方案比較,我們最終決定采用CC2420為射頻芯片。
2.1 無線網關模塊
本文將2.4GHz的射頻收發器等進行應用,將其和MCU有機結合在一起,使無線網關的功能設計得以實現,使不同芯片的功能得以全面的發揮出來。MCU與PC機串口之間的連接使用RS232總線標準,在此選擇MAXIM公司的MAX232接收/發送器作為控制芯片和PC機串口串行接口電路,其特點有很多,一是功耗不高,二是單電源。想要使無線網絡和數據通訊的作用得以全面實現,在設計無線網關的過程中,其接口中有兩種,一是串行接口,二是射頻接口,在這之中,后者主要在無線傳感器節點中進行應用,使近距離通信和以實現,前者主要在與計算機的通信中應用。
2.2 醫用制氧機控制器模塊
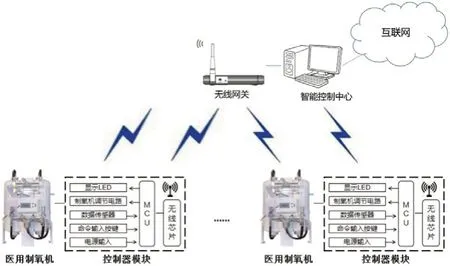
圖1:醫用制氧機群總體架構
這一模塊設計重點是接收、傳送數據,對出氧量電路進行控制,有效的管理終端設備。對于傳感器來說,其特點也有很多,一是尺寸不大,二是功耗小,三是適應能力突出,因此,可以結合Zigbee協議的相關內容,其設備發射范圍是在0dbm到3.6dbm之間,通信距離在10米到75米間可以對鏈路的情況進行檢測,同時結合檢測的具體情況,可以對發射功能進行有效的調節,一方面使通訊質量得以確保,使小的能量消耗得以確保。想要使成本得以下降,所以,這一設計中將集成度高一些,性價比高一些的芯片進行應用,從而對網絡的建設成本進行控制,使MCU和CC2420結合起來,方是最有效的選擇。
2.3 智能控制中心
這一中心是通過計算機組成來實現的,其最突出的作用就是將數據進行收集以及監測,在這個過程中,有效的處理數據,對其進行妥善的保存,對數據進行傳輸和發送。在使用制氧機時,控制中心設備利用無線網絡將控制指令進行傳輸,使傳感器節點得以開啟,在傳感節點將指令進行獲取時,從而采集制氧機的不同指標,采集完成后,利用無線網絡,把數據向控制中心進行反饋。
3 醫用制氧機群智能控制系統軟件核心部分設計
對于控制系統來說,其工作無異常,只以硬件為主是不行的,必須有軟件的配合方可使控制系統得以形成。對于醫用制氧機來說,其智能系統的軟件部分,設計內容有很多,例如設計CC240程序,以及設計讀寫程序等等。由于本文篇幅有限,就只此處針對軟件的幾個核心部分在實現原理與邏輯方面進行簡單的描述。
首先,我們簡單分析一下無線網關的軟件實現原理。對于星型網絡來說,在網絡內有兩個關鍵點,一是網關,二是終端。對于無線網關來說,其工作狀態有四個方面,一是初始化,二是初始化工作,三是正常啟動,四是正常工作。對于初始化狀態來說,其主要是網關的最初情況,在形成網絡時,一定要有無線網關,其它所有操作是不可以在此時實施的。此后開始進入初始化工作狀態,也就是檢索網關,同時將可用信道進行明確,做好建網準備。倘若建網失敗,那么無線網關要向最初的狀態返回,再將進行建網。倘若建網沒有失敗,那么就是正常啟動。值得一提的是,初始化新網絡時,一定要對網絡初始化的完成情況進行監測,同時將肯定的回答進行獲取,這樣初始化方可結束。
其次,我們再簡單分析一下控制器模塊的軟件實現原理。對于控制器模塊來說,其功能有兩個,一是利用數據采集來對信號進行檢測,同時分析檢測值,將控制參數進行傳送,使自控功能得以實現;二是能夠和其它網絡節點實施數據效的,也就是我們所說的網絡通訊。下面,就幾個關鍵點的設計原理進行簡單說明:
(1)智能控制程序設計原理:醫用制氧機控制器模塊在正常運行時,系統會智能的根據當時氧氣的實時流量、濃度進行控制。對于智能流量控制器來說,以流量濃度檢測傳感器為依托,對氧氣流量、濃度值等進行檢測,同時可以結合這一設定值對其有效的管控。對于氣體流量濃度傳感器來說,能夠對氧化的流量、濃度等情況進行檢測,再把這一數據和設定值進行對比,倘若兩個數值是一樣的,那么就意味著其流量與設計要求相符合;相反,控制器將信號進行傳輸,對控制電路進行調節,直至兩者相同時結束。
(2)智能流量檢測程序設計原理:在設計過程中,對氧氣流量的情況進行控制,可以將多種智能控制模式進行應用,任意一種模式與相應的流量值是匹配的,將其進行設定,從而使自動調節得以實現,從而使流量檢測模塊的作用充分發揮。同時,對于MCU來說,隔1秒鐘就會將流量值進行讀取,使其和設定值進行對比。想要使震動干擾形成的調節動作得以避免,就要將延時防擾程序加入進來,其延時時間是4秒,然而其產生的流量差值在高于50秒時方可將子程序啟動;否則視為干擾不作處理。倘若將子程序啟動,那么防擾子程序就會停止,前者會對等級范圍進行檢測,再隔1秒實施調節,直至與設計值相符合為止。
(3)智能調節模塊程序設計原理:倘若其傳感器出現電信號的情況時,利用負載電阻將其向電壓值進行轉變,再向A/D轉換器進行傳送,MCU把數字信號和寄存器設定值進行對比,值小一些就意味著氣體流量要小一些,需增大流量;反之,需降低流量。控制氣體流量時,利用交流電能夠實現過零檢測。
4 結論
本文就如何實現基于無線網絡的醫用制氧機群智能控制進行了總體框架、核心硬件設計部分、軟件實現原理三個部分進行了簡單說明,作者所在單位也通過該技術解決方案,研發出新款醫用制氧機產品,投入市場后,運行穩定,解決了用戶在醫用制氧機使用過程中的管理問題,并很方便的接入醫院信息化大數據平臺,獲得用戶的一致好評。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
