高超聲速邊界層轉捩高速紋影顯示
2019-10-09 03:27:02陳蘇宇張扣立
宇航學報 2019年9期
陳蘇宇,常 雨,江 濤,李 強,張扣立
(中國空氣動力研究與發展中心超高速空氣動力研究所,綿陽 621000)
0 引 言
邊界層轉捩對高超聲速飛行器表面的熱流和摩阻等影響顯著,研究邊界層轉捩無論是對飛行器設計還是對氣動機理的理解都十分重要。傳統的地面試驗主要依靠接觸式測量技術來獲得邊界層的特性,比如壓力和熱流測量。隨著測試技術的發展,紋影顯示方法的時間和空間分辨率都顯著提高,近年來比較多應用到邊界層轉捩過程的研究中。
近十年來,以美國Maryland大學、Sandia國家實驗室、德國DLR和比利時VKI的研究人員為代表,開展了一系列借助高速紋影手段研究高超聲速邊界層轉捩的工作[1-9],試驗風洞主要涉及靜音風洞、高焓激波風洞和長射風洞,馬赫數跨度從Ma5到Ma14,主要以半錐角為7°的圓錐作為研究模型。VanDercreek等[1]較早通過聚焦紋影捕捉到了多種試驗狀態下的邊界層第二模態波的空間結構,但其圖像清晰度仍有待提升。Laurence等[2]則率先利用高時間分辨率、低曝光時間、連續光源的常規紋影系統獲得了連續的、有清晰第二模態波結構的紋影圖像序列,證明了通過紋影手段測量邊界層不穩定波的時空發展特性的可能性,不久Laurence等[3]采用激光作為光源的紋影系統同樣也獲得了較好的結果。Kennedy等[4]發展了對紋影圖像的空間數據進行時間域的重構方法,由此得以分析邊界層某個固定位置功率譜密度特性并與高頻壓力傳感器測量第二模態波的頻譜結果進行對比,符合較好。文獻[5-6]開展的高速紋影試驗研究第二模態不穩定性增長和破碎為湍流斑的過程,發現在Ma5條件下,第二模態波是間歇產生的,且破碎后成為孤立的湍流斑,夾在未失穩的層流邊界層之間;而在Ma8條件下,第二模態波則直接破碎為完全湍流結構。Laurence等[7]開展的高焓條件下轉捩試驗采用了激光光源的短時脈沖間隔模式,實現了超過相機幀頻的時間分辨率,以匹配高焓條件下邊界層擾動的主頻率相比低焓更高的情況。Bonucci等[8]在長射風洞中開展了高速紋影試驗,通過對邊界層灰度分布做快速傅里葉變換獲得了不穩定波的波長特性。高速紋影顯示的結果數據量較大,為此相關的數據處理方法也有所發展[10]。
北京大學的研究人員用紋影方法捕捉到了裙錐邊界層的第二模態波及其破碎的過程[11],但國內整體來說在這方面的研究很少。本文利用高速紋影顯示技術對圓錐邊界層第二模態波序列的發展進行了探究。試驗在超高速空氣動力研究所的FD-14激波風洞中開展。除了紋影顯示外,本文還布置鉑薄膜熱流傳感器測量了一條子午線上的邊界層轉捩位置,并布置了PCB傳感器測量第二模態波的主頻。
1 試驗條件
1.1 試驗設備、流場條件與試驗模型
試驗在FD-14激波風洞中開展。該風洞屬于反射式激波風洞,驅動氣體為氫氣與氮氣的混合氣體,被驅動氣體為氮氣,噴管出口直徑0.6 m。通過更換喉道可實現模擬馬赫數范圍為6~12,通過調整總壓可實現模擬雷諾數范圍為2.1×105~6.5×107m-1,有效試驗時間2~13 ms。試驗的自由來流的參數如表1所示。

表1 自由來流不同狀態參數Table 1 Free-stream parameters of different conditions
1.2 試驗模型與傳感器
試驗模型為半錐角7°的圓錐體(見圖1),軸向長度598.4 mm,頭部鈍度Rn可變,分別為0.2 mm,0.5 mm和2 mm。所有試驗狀態的模型攻角均為0°。一共布置3個PCB 132A31型壓電式傳感器、6個Kulite XTE-190M型壓阻式傳感器和14個鉑薄膜熱流傳感器。所有傳感器的采樣頻率設置為3 MHz。試驗中模型表面為等溫壁,壁溫Tw=297 K。定義x方向為錐模型的中心軸向,指向下游為正。

圖1 試驗模型風洞安裝照片Fig.1 Photo of test model in shock tunnel
1.3 紋影系統
試驗中使用的紋影系統光路如圖2所示。光源為連續光源。高速相機的工作幀頻為100 kHz,曝光時間不超過200 ns,這樣的曝光時間足以捕捉到第二模態波的瞬態結構。相機分辨率為1024×186 pixels。單位長度內包含的像素為4.15 pixel/mm,足夠分辨特征尺度不小于1 mm的擾動結構。刀口水平布置,刀口外法向豎直朝上。

圖2 紋影系統光路圖Fig.2 Optical sketch of schlieren system
2 試驗結果分析
2.1 熱流測量結果
所有試驗狀態的鉑薄膜傳感器測量的熱流分布結果如圖3所示。所有熱流測點位于同一子午線上。以熱流有較明顯躍升(相對層流圓錐邊界層熱流沿下游單調遞減的趨勢)以及單點熱流時域特性作為轉捩起始的判定依據[12],可知對于狀態A來說,整個測量范圍內邊界層幾乎保持為層流狀態,僅在模型尾部(x>550 mm)有輕微的轉捩跡象。就狀態B的結果而言,由于單位雷諾數提高了三倍多,轉捩位置明顯提前,鈍度對轉捩的抑制作用也較為明顯。
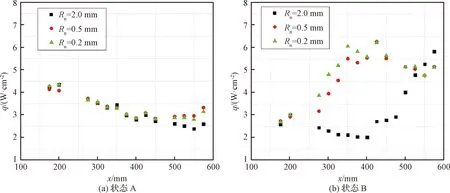
圖3 錐模型子午線熱流分布Fig.3 Heat flux distribution on the meridian of cone surface
2.2 第二模態波發展的一般特性
圖4、圖5(每個狀態有連續六幀紋影圖像)給出了幾種試驗狀態下經過簡單的圖像增強處理的邊界層紋影圖像序列,圖像增強的方法為:把灰度值最大的1%的像素點設為飽和灰度值,把灰度值最小的1%的像素點設為0灰度,剩下的數據按原灰度相對關系放大至0到飽和灰度值的區間,從而得到對比度更大的新圖像。流動方向從右到左。圖4(a)顯示了擾動較小的層流邊界層,周期性的波動結構并不可見。當頭部鈍度降低到0.5 mm時,如圖4(b)所示,在中下游處出現了一定的“繩狀波”[13]跡象。頭部鈍度繼續降低為0.2 mm,如圖4(c)所示,下游周期性的“繩狀波”特征則更為明顯。

圖4 狀態A下圖像增強處理的紋影圖像序列(x=304~486 mm)Fig.4 Enhanced image sequence under condition A (x=304~486 mm)
試驗狀態B的單位雷諾數相比狀態A增加到1.6×107m-1。頭部鈍度為2 mm時,圖5(a)中顯示的第二模態波的發展已經十分充分,近乎飽和,即將失穩,在接近下游紋影觀察視野出口處已經可見第二模態波破碎為湍流結構。需要指出,“繩狀波”是一個局部區域,其流向范圍大約為5~7個波長,并且在有效試驗時間(含數百幀圖像)內是間歇性地從上游產生的。Casper等[5]也發現了這種間歇性,但并未作出解釋。本文認為,這種間歇性可能和第二模態波發展本身包含不同階段有關,“繩狀波”代表了第二模態波發展后期的飽和階段,其周期性結構通過紋影得以顯現,而“繩狀波”上游邊界層的灰度起伏并不明顯,該區域對應第二模態波發展的早期,這點從后文PCB結果(見圖9)可以獲得佐證,x=288 mm處,在第二模態波主頻附近仍然可以見PSD曲線明顯的波峰結構,這說明第二模態波擾動已經有一定的幅值,并且一直往下游發展,到x=388 mm處其幅值已經放大了10倍以上。
頭部鈍度減小到0.5 mm,如圖5(b)所示,圖像里中下游的邊界層已經破碎為完全湍流狀態,上游處第二模態波破碎為湍流結構的過程清晰可見。值得注意的是,在上游的湍流斑和下游的完全湍流區之間仍然存在未完全失穩的一段邊界層,至少維持了50 μs的時間,這說明在該狀態下,邊界層轉捩經歷了第二模態波失穩為局部的湍流斑結構(夾在未失穩邊界層之間)再到局部湍流斑與下游全湍流結構融合的過程。頭部鈍度繼續減小到0.2 mm,如圖5(c)所示的轉捩圖景略有變化,即第二模態波直接破碎為湍流結構,并未見孤立的湍流斑。這說明轉捩過程相比Rn=0.5 mm時變得更為直接,并且鈍度的減小會帶來對轉捩的促進作用,這和熱流測量結果是相互呼應的。

圖5 狀態B下圖像增強處理的紋影圖像序列(x=304~482 mm)Fig.5 Enhanced image sequence under condition B (x=304~482 mm)
2.3 第二模態波的波長與傳播速度
第二模態波本質上是一種聲波[14],根據波的傳播原理,如果得到波長和傳播速度的數據,就可以計算出其頻率。本節主要通過相關的數據處理方法,從紋影圖像中進行數據挖掘,計算第二模態波的波長與傳播速度。根據第2.2節的結果,只分析結果圖像中包含第二模態波和未見明顯擾動層流邊界層、不含湍流和湍流斑結構的試驗狀態,這樣可以避免其他流動結構帶來的干擾,減小計算誤差。
在計算波長時,采用對紋影圖像的灰度分布計算功率譜密度(PSD)的分析方法,選擇Blackman窗函數,交疊率為50%。順著流向平行于壁面截取一條直線貫穿整個紋影圖像,直線與壁面的距離選定在0.7倍左右的邊界層厚度(邊界層在視窗中間位置的厚度),記為距離dn=0.7δ,其中邊界層厚度為基于紋影圖像(即密度梯度)的厚度。以無流場狀態下同樣位置的直線灰度的平均值作為標準化的參考值,計算該直線上的標準化灰度值的PSD分布,橫坐標為“空間頻率”,即波數ν(波長的倒數,ν=1/λ),PSD曲線在第二模態波的可能波數范圍內(波長一般為邊界層厚度的2~3倍[8,10])出現的局部明顯峰值特征所對應的波數即為第二模態波的波數。
根據上述方法得到圖5(a)對應的PSD曲線如圖6所示,t1為圖5中第一幀圖像對應的時刻,在ν=0.15~0.17 mm-1范圍內PSD存在明顯高于周邊波數的峰值特征,但是每個時刻在該區間PSD最大值對應的波數(本文稱為特征波數νpeak)仍存在一定的差異,最小為0.153 mm-1,最大為0.170 mm-1,即計算出來的波長差異最大可達0.66 mm(對應2.7個像素點)。這種偏差的來源可能是:光路積分效應,來流噪聲的干擾,光源背景擾動和電子器件本身的噪聲等。

圖6 狀態B下邊界層流向截線灰度PSD曲線(Rn=2 mm,dn/δ=0.7)Fig.6 Gray scale PSD curves on a streamwise line across boundary layer under Condition B (Rn=2 mm, dn/δ=0.7)
考慮到有效試驗時間內有至少300幀圖像需要做分析,僅用人眼逐個識別波峰結構并獲取波長值效率太低,本文采用計算機程序進行批量分析,程序的流程圖如圖7所示,其中局部PSD峰值足夠大具體指PSD峰值是無流場狀態下同樣波數對應的PSD值的5倍以上。圖8給出了特征波數的批量處理結果,取出現概率(次數)最多的特征波數的倒數作為第二模態波的波長,注意這個波長值是作為所分析流場范圍內和有效試驗時間內第二模態波特征尺度在統計意義上的量,對應在特定時間和空間內擾動能量最強的第二模態波的波長。圖8中三種試驗狀態對應的波長依次為5.87 mm,6.30 mm,5.01 mm。

圖7 第二模態波的特征波數批量分析流程Fig.7 The flowchart of analysis for characteristic wavenumber of second-mode wave in batch mode

圖8 有效試驗時間內第二模態波特征波數直方圖Fig.8 Histogram of characteristic wavenumber of second-mode wave during effective test time
在計算傳播速度Up時,利用互相關算法[15],對有效試驗時間內相鄰幀的紋影圖像做互相關分析。對于零攻角對稱旋成體來說,邊界層法向的速度分量較小,因此只沿流向做一維互相關分析。第二模態波的傳播速度計算結果以及計算誤差如表2所示,傳播速度的計算相對標準差均在10%以內,傳播速度與自由來流速度比值Up/U∞與Kennedy等[4]的研究結果較為一致。

表2 第二模態波傳播速度計算結果Table 2 Calculated results of second-mode wave propagation speed
2.4 PCB信號的PSD結果及與紋影的對比
本文給出經過標準化處理的PCB壓力信號的PSD值,每個PCB傳感器壓力信號p′對應的參考壓力pe為同一x坐標處(如無傳感器則采用線性插值結果)的Kulite傳感器測量的壁面壓力,即對p′/pe做功率譜密度分析,選擇Hamming窗函數,交疊率為50%。其中兩個PCB傳感器的位置分別為x=288 mm,x=388 mm,在同一子午線上,另外一個傳感器與x=388 mm處的傳感器位于同一周向線上,周向距離為10 mm,記為d=10 mm。
在單位雷諾數較低的狀態A,Rn=0.5 mm時,x=288 mm處在288 kHz附近可見較為明顯峰值特征(見圖9(a)),x=388 mm處的兩個測點PSD幅值在268 kHz和264 kHz附近分別達到局部峰值,兩者主頻相差無幾,且擾動幅值相比上游顯著放大,說明此時第二模態波發展已較為充分。當頭部鈍度下降到0.2 mm時,x=388 mm處的兩個測點PSD幅值分別在277 kHz和274 kHz附近分別達到局部峰值(見圖9(b)),第二模態波的主頻相比Rn=0.5 mm時略有提高。在單位雷諾數較高的狀態B,Rn=2 mm時(見圖9(c)),第二模態波沿流向從x=288處增長到x=388 mm處,主頻由283 kHz下降到271 kHz,幅值則放大了10倍以上,從圖5(a)可以看出,該處PCB傳感器正處于第二模態波的空間結構基本飽和的位置。

圖9 PCB壓力信號的PSD結果Fig.9 PSD results of PCB pressure signals
需要指出的是,不管是紋影顯示還是壓力測量均未發現第一模態波存在的跡象,這和大多數Ma6以上的軸對稱流動的轉捩研究結果[14,16-17]相同,該類條件下第二模態波占主導地位,而第一模態波的強度十分微弱。
綜合上述結果,得到分別基于紋影顯示和PCB測量結果計算的第二模態波的主頻(見表3)。狀態A和B兩種狀態下紋影視野的中間位置分別為x=393 mm和x=395 mm,與x=388 mm處的兩個PCB傳感器相距很近,因此將紋影和PCB的結果做對比是可行的。結果顯示,兩種測量方法對主頻的計算結果一致性較好,絕對偏差均在10%以內,這說明了高速紋影方法測量第二模態不穩定性的可靠性。
值得注意的是,上述結果的獲得,與第二模態波空間結構的二維特點關系較大[7],這樣可以有效降低紋影顯示的光路積分效應帶來的干擾,從而實現對第二模態波在一定程度的定量測量,紋影顯示結果與PCB測量符合較好則證明了這一點。然而在邊界層轉捩過程中,第二模態不穩定性并不是唯一的影響因素,橫流不穩定性以及由人工激勵源(比如粗糙帶和聲學表面結構)產生的擾動對轉捩的影響同樣不容忽視,橫流渦一般來說是三維的,其他類型的擾動結構也以三維居多,因此紋影方法的應用仍然有待進一步的發展,其適用性的拓展還需更多的研究來支撐。

表3 紋影與PCB各自對應第二模態波主頻結果Table 3 Fundamental frequencies of schlieren and PCB results
3 結 論
1)在FD-14風洞中開展了Ma10的鈍錐邊界層轉捩試驗,應用高速紋影顯示技術獲得第二模態波演變的空間結構和時域特性,通過空間域的PSD分析和互相關算法得到了第二模態不穩定波的波長和傳播速度,實現了一定程度的定量測量。
2)PCB壓力測量技術與高速紋影顯示技術在測量第二模態不穩定波的主頻上符合較好,表明了紋影顯示方法測量第二模態不穩定波方面的可靠性。
3)進一步的研究仍需開展,用于拓寬紋影顯示方法測量邊界層內擾動結構的適用范圍。
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
廣西科技大學學報(2016年1期)2016-06-22 13:10:37
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
航空學報(2015年4期)2015-05-07 06:43:35
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:39
