基于CTCS-3級列控系統的高速鐵路移動閉塞實現
2019-10-11 03:36:36徐效寧呂書麗
鐵道標準設計 2019年10期
徐效寧,李 輝,王 菲,呂書麗
(1.中國鐵道科學研究院集團有限公司通信信號研究所,北京 100081; 2.國家鐵路智能運輸系統工程技術研究中心,北京 100081)
近年來,國民經濟的快速發展,對高速鐵路的運輸能力提出了更高的要求。目前我國高速鐵路已成功試驗的自動駕駛(ATO)技術被證明是一種有效的途徑,它在提供自動化程度的同時,能夠在一定程度上提高運輸效率[1-3]。ATO控車時以列控系統提供的行車許可終點作為目標點,我國高速鐵路裝備的CTCS-2/3級列控系統均是采用準移動閉塞方式,它們的行車許可終點為前方占用的閉塞分區入口處。而移動閉塞方式下,行車許可終點可以延伸至前方列車的安全車尾處,因此可以進一步縮短行車間隔,提高線路的運輸能力[4,5]。
我國列車運行控制系統(CTCS)的最高應用等級是CTCS-4級,它取消了軌道電路,通過地面和車載設備共同完成列車定位,能夠實現移動閉塞。但我國既有高速鐵路一直基于軌道電路實現列車占用檢查,干線鐵路尚未有取消軌道電路的運用經驗。
通過分析當前CTCS-4級列控系統取消軌道電路面臨的問題,提出了一種基于CTCS-3級列控系統的移動閉塞實現方案,并給出一種移動閉塞方式下行車許可的計算方法,為我國高速鐵路移動閉塞的實現提供一定的參考。
1 CTCS-4級列控系統面臨的問題
1.1 CTCS-4級列控系統介紹
2004年,為滿足鐵路運輸對列車運行控制系統的需要、提高安全性能、實現互通運營、規范系統設計和適應發展需求,原鐵道部編制了《CTCS技術規范總則》,給出了我國列車運行控制系統CTCS的定義、目標和體系框架。CTCS根據系統配置按功能劃分為CTCS-0,1,2,3,4共5個等級[6]。
CTCS-4級列控系統基于無線通信傳輸平臺,由無線閉塞中心RBC和車載系統共同完成列車定位和列車完整性檢查。RBC依據列車的位置報告和列車完整性確認列車頭部和尾部位置,邏輯判斷線路上各車的占用狀態。由于RBC知道線路上每輛列車的位置,所以為后車分配的行車許可能夠延伸至前車的安全車尾處,在保證安全的前提下,提高了運輸效率。
1.2 高速鐵路中軌道電路的作用
CTCS-2級和CTCS-3級列控系統均由軌道電路實現列車占用檢查,CTCS-2級列控系統還通過軌道電路向車載設備傳輸前方區段空閑信息[7]。
因為CTCS-3級列控系統以CTCS-2級作為后備系統,所以高速鐵路不論裝備CTCS-2級還是CTCS-3級列控系統,軌道電路都同時具備列車占用檢查和傳輸前方區段空閑信息兩項功能。
根據高速鐵路設計規范,高速鐵路一般不是一條孤立的線路,既要與其他的高速鐵路連接,還會與速度較低的既有路網連接[8]。當裝備列車運行監控裝置(LKJ)的列車進入高鐵線路時,一方面列控地面設備通過軌道電路可以確認閉塞分區的占用情況,為其他裝備CTCS-2/3級列控車載設備的列車提供行車許可;另一方面,LKJ也可以從軌道電路信息中獲取前方區段空閑信息,實現正常模式控車[9]。因此,軌道電路對于保證高速鐵路的兼容性起到了關鍵作用。
1.3 取消軌道電路后的影響分析
如果高速鐵路裝備CTCS-4級列控系統,取消了軌道電路,根據相關研究和城市軌道交通移動閉塞模式的運用經驗[10-14],以下運營場景下將無法滿足運輸需要。
(1)無線通信中斷
如果GSM-R網絡故障或其他原因造成無線通信中斷,地面設備RBC將無法得知列車的最新位置,無法給后續列車延長行車許可,運輸效率將受到嚴重影響。
(2)跨線列車運行
當裝備CTCS-2級車載設備的列車進入高鐵線路時,RBC將無法得知列車位置,也無法給裝備CTCS-4級車載設備的列車發送行車許可。如果高鐵線路允許裝備CTCS-2級車載設備的列車進入線路,運輸能力將嚴重下降。裝備LKJ的列車進入線路時,線路也會存在相同問題。
(3)RBC故障重啟
CTCS-4級列控系統的RBC如果發生故障重啟,它無法確認管轄范圍內列車的數量,也無法確認是否所有的列車都已重新建立無線通信。如果某一輛列車未能報告位置,RBC誤認為該區段沒有列車占用,危險性可想而知。因此,這種情況只有制定詳細的規章操作,并且恢復過程也需要耽誤很長的時間。一旦RBC發生故障重啟,線路運輸能力幾近癱瘓。
2 基于CTCS-3級列控系統的方案
2.1 系統總體結構
根據CTCS-4級列控系統取消軌道電路面臨的問題,提出一種現階段實現移動閉塞的列控系統方案,它基于CTCS-3級列控系統[15],其系統結構如圖1所示。
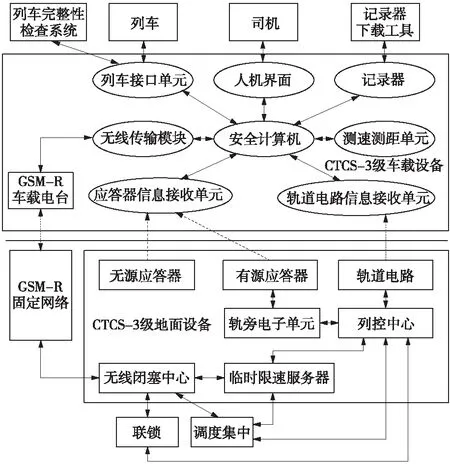
圖1 高速鐵路移動閉塞的列控系統結構
基于CTCS-3級列控系統的移動閉塞方案架構包括車載設備和地面設備。地面設備包括無線閉塞中心、軌旁電子單元及應答器(有源和無源)、軌道電路、列控中心和臨時限速服務器等;車載設備包括安全計算機、測速測距單元、無線傳輸模塊、應答器信息接收單元、軌道電路信息接收單元、列車接口單元、人機界面和記錄器等。
與既有CTCS-3級列控系統相比,車載設備增加了與列車完整性檢查系統(TIMS)的接口,系統其他設備硬件結構與既有CTCS-3級列控系統保持一致[16-17],這有利于在既有高鐵線路上升級改造。對于地面子系統而言,只需升級相關設備軟件,各設備的硬件接口都可以維持不變。
2.2 基本工作原理
基于CTCS-3級列控系統的移動閉塞方案中,RBC需要綜合考慮閉塞分區的占用狀態和列車的位置報告信息。當某一列車通信中斷或列車完整性丟失時,RBC應采用閉塞分區的占用狀態來彌補這些故障列車的位置信息,以保證為其他正常通信列車提供移動閉塞的行車許可。
同時,由于CTCS-3級列控系統以CTCS-2級列控系統作為后備。這樣,當通信中斷和裝備CTCS-2級或LKJ的跨線列車進入高鐵線路時,列控中心可以通過軌道電路為這些列車提供行車許可,保證線路的運輸效率。
3 移動閉塞的行車許可計算
3.1 基本思路
行車許可(MA)是行車的安全憑證,其終點是列車被授權運行到的位置。移動閉塞方式下,行車許可終點可以延伸到前車的安全尾部。但考慮到無線通信中斷和跨線運行等情況,高鐵線路上會出現以不同運行等級的列車在同一區間混跑的情況,行車許可的計算變得復雜。
基于CTCS-3級列控系統的架構特點,提出一種移動閉塞下行車許可的計算方法,該方法利用CTCS-3級列控系統的既有邏輯,可以降低復雜度。下面將以區間運行為例進行說明,如圖2所示,計算方法具體分為兩步:
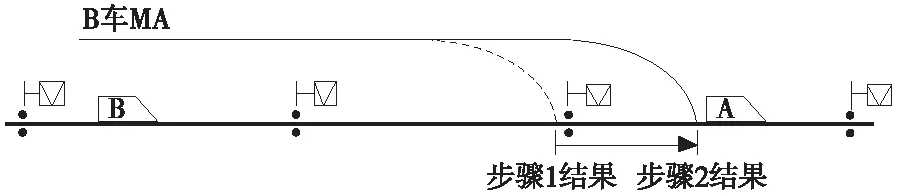
圖2 行車許可計算原理示意
步驟1 RBC參照CTCS-3級列控系統既有邏輯,根據閉塞分區的占用狀態計算行車許可,行車許可的終點為前方占用閉塞分區的入口處[18];
步驟2 RBC判斷前方占用閉塞分區是否均是正常通信列車(位置報告有效且列車完整性確認),如果是,則將行車許可終點延伸至對應前方列車的安全車尾處。
按照這樣的思路,系統只需在既有CTCS-3級處理邏輯的基礎上,增加上述步驟2的計算。當不滿足條件或無法判斷時,系統會給出與既有CTCS-3級列控系統相同的MA,保證安全和基本的運輸效率。
3.2 建模實現
既有CTCS-3級列控系統的行車許可以閉塞分區或進路為基本單元,對于區間而言,每個閉塞分區有兩種工作狀態:“鎖閉”和“使用”。當閉塞分區空閑時,該閉塞分區自動轉為“鎖閉”狀態;當列車占用軌道區段時,其所處閉塞分區將呈“使用”狀態。既有CTCS-3級列控系統的行車許可在“使用”狀態的閉塞分區入口處終止[19]。
為了便于移動閉塞模式下MA的計算,本文將CTCS-3級列控系統的原“使用”狀態再分出一個邏輯狀態“占用鎖閉”,即該分區雖被占用,但仍允許后續列車進入。當閉塞分區內所有列車均與RBC正常通信、列車位置報告有效且列車完整性已確認時,工作狀態即為“占用鎖閉”,否則該占用分區的工作狀態為“使用”。
3.1節步驟1計算行車許可的原則與既有CTCS-3級列控系統相同,只有“鎖閉”的閉塞分區才能分配且僅能分配給一個注冊的車載設備[20]。需要注意的是,對于以完全監控(FS)模式運行的車載設備,當原行車許可終點不對應閉塞分區入口時,不能直接分配新的行車許可。圖3給出了一種場景,列車A和列車B均為通信列車,閉塞分區3被其他列車占用,B車MA終點為A車安全車尾。若A車通信中斷,當閉塞分區3變為空閑時,因為B車MA終點至閉塞分區2末端之間的線路情況未知,RBC不應給B車延長MA。而既有CTCS-3級列控系統行車許可終點總在閉塞分區的邊界,對于以FS模式運行的列車不存在這種場景。所以,步驟1計算MA時,若原邏輯未考慮這種情況,則移動閉塞模式時需增加相應的處理。這種情況下,B車在MA耗盡時轉目視模式行車,RBC應在確認前方軌道空閑(TAF)后再發送新的MA。

圖3 MA終點不對應閉塞分區入口的場景
步驟2計算行車許可,當判斷閉塞分區的工作狀態為“占用鎖閉”時,則將MA終點延伸至對應前方列車的安全車尾處。通過這樣的處理,問題集中在判斷閉塞分區的工作狀態上,本文將以有限狀態機(Finite States Model,簡稱FSM)對此進行建模。圖4給出了移動閉塞方式下閉塞分區工作狀態轉換的FSM模型,圖中轉換條件的“,”表示滿足其一即可進入。表1為對應條件的含義,系統判斷列車與閉塞分區的位置關系時,應在保證安全的前提下考慮設備的反應時間和傳輸延時。

圖4 閉塞分區工作狀態轉換的FSM模型
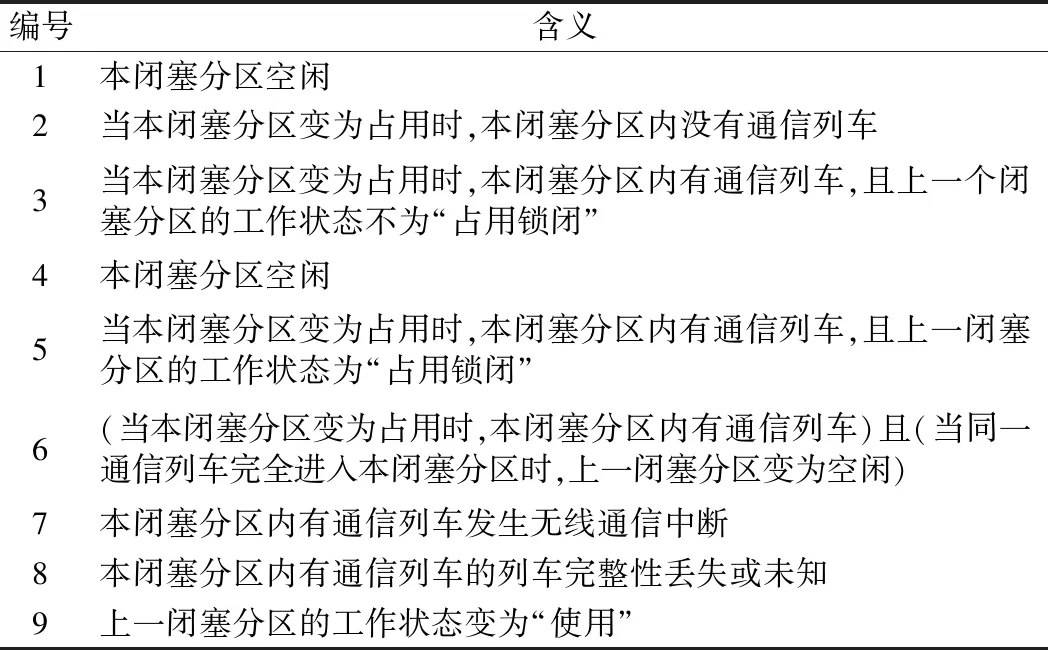
編號含義1本閉塞分區空閑2當本閉塞分區變為占用時,本閉塞分區內沒有通信列車3當本閉塞分區變為占用時,本閉塞分區內有通信列車,且上一個閉塞分區的工作狀態不為“占用鎖閉”4本閉塞分區空閑5當本閉塞分區變為占用時,本閉塞分區內有通信列車,且上一閉塞分區的工作狀態為“占用鎖閉”6(當本閉塞分區變為占用時,本閉塞分區內有通信列車)且(當同一通信列車完全進入本閉塞分區時,上一閉塞分區變為空閑)7本閉塞分區內有通信列車發生無線通信中斷8本閉塞分區內有通信列車的列車完整性丟失或未知9上一閉塞分區的工作狀態變為“使用”
注:閉塞分區的空閑/占用由聯鎖設備發送給RBC。
由于非通信列車不向RBC報告列車位置,RBC應避免將存在非通信列車的閉塞分區錯誤的轉入“占用鎖閉”工作狀態。“占用鎖閉”工作狀態轉換的判斷邏輯如下。
(1)在閉塞分區由空閑變為占用的時刻,如果根據列車位置報告有列車的最小安全車頭進入該分區的入口,說明該分區是由本車占用的,該分區本車前方沒有其他非通信列車;在該列車完全進入本閉塞分區的時刻,如果上一分區由占用變為空閑,說明上一分區沒有非通信列車,本分區通信列車的后方不存在非通信列車進入的可能,此時本分區轉入“占用鎖閉”工作狀態(條件6)。
(2)當上一分區的工作狀態為“占用鎖閉”時,也可以說明上一分區沒有非通信列車,結合本分區列車前方沒有非通信列車的判斷,本分區也可轉入“占用鎖閉”工作狀態(條件5)。
(3)對于處于“占用鎖閉”的閉塞分區,如果列車發生無線通信中斷、列車完整性丟失或未知時,本分區轉入“使用”工作狀態(條件7和條件8)。
(4)對于處于“占用鎖閉”的閉塞分區,如果上一閉塞分區處于“使用”工作狀態,說明上一分區可能存在非通信列車,本分區可能無法判斷該車的位置,這種情況下本分區退出“占用鎖閉”,轉入“使用”工作狀態(條件9)。例如,上一分區存在多輛非通信列車,即使一輛列車完全駛入本分區時,上一分區仍在占用,本分區無法得知已有非通信列車進入,系統通過本條件對這種情況進行防護。
(5)當本閉塞分區空閑時,工作狀態轉入“鎖閉”(條件4)。
3.3 運營場景驗證
本節通過特殊運用場景的分析,對3.2節閉塞分區工作狀態轉換的FSM模型進行驗證。
(1)區間建立無線通信
如圖5所示,列車A位于閉塞分區1,該車在位置1處與RBC建立無線通信,報告有效的列車位置且列車完整性已確認。

圖5 區間建立無線通信
位置1:A車進入閉塞分區1前未建立無線通信,閉塞分區1工作狀態為“使用”(條件2);后車MA終點可以延伸到閉塞分區1的入口處。
位置2:A車進入閉塞分區2,閉塞分區2工作狀態轉為“使用”(條件3)。
位置3:A車出清閉塞分區1,閉塞分區1空閑,其工作狀態轉為“鎖閉”(條件1),閉塞分區2工作狀態轉為“占用鎖閉”(條件6);后車MA終點可以延伸到閉塞分區2內A車的安全車尾處。
位置4:A車進入閉塞分區3,閉塞分區3工作狀態轉為“占用鎖閉”(條件5)。
位置5:A車出清閉塞分區2,閉塞分區2空閑,其工作狀態轉為“鎖閉”(條件4);后車MA終點可以延伸到閉塞分區3內A車的安全車尾處。
假如后續列車在進入閉塞分區1前已建立無線通信,在追蹤A車的過程中,閉塞分區2的工作狀態依次為“占用鎖閉”、“鎖閉”,所以閉塞分區3保持在“占用鎖閉”狀態,后車按照MA可以進入閉塞分區3。
(2)對非通信列車的防護
如圖6所示,列車A和列車B均位于閉塞分區1,B車為非通信列車,A車在位置1處與RBC建立無線通信,報告有效的列車位置且列車完整性已確認。

圖6 對非通信列車的防護
位置1:A車進入閉塞分區1前未建立無線通信,閉塞分區1工作狀態為“使用”(條件2)。
位置2:A車進入閉塞分區2,閉塞分區2工作狀態轉為“使用”(條件3)。
位置3:A車出清閉塞分區1,由于B車的存在,閉塞分區1仍占用。
位置4:A車進入閉塞分區3,閉塞分區3工作狀態轉為“使用”(條件3)。
位置5:A車出清閉塞分區2,閉塞分區2空閑,其工作狀態轉為“鎖閉”(條件1),閉塞分區3工作狀態轉為“占用鎖閉”(條件6)。
假如這時B車進入閉塞分區2,閉塞分區2工作狀態轉為“使用”(條件2),閉塞分區3工作狀態轉為“使用”(條件9);當B車出清閉塞分區2時,閉塞分區2工作狀態轉為“鎖閉”(條件1)。由于此時閉塞分區3工作狀態為“使用”,后車MA終點為閉塞分區3的入口處,而不是越過B車延伸到A車的安全車尾處。
(3)無線通信中斷或列車完整性丟失
當列車完整性丟失或未知時,本方案RBC會與車載設備中斷無線通信,這樣后續處理與無線通信中斷場景一致。
如圖7所示,列車A和列車B均為正常通信列車,此時閉塞分區1、閉塞分區2和閉塞分區3的工作狀態依次為“占用鎖閉”、“占用鎖閉”和“鎖閉”,B車的MA終點為A車安全車尾處。

圖7 無線通信中斷
若A車在閉塞分區2時無線通信中斷,閉塞分區2工作狀態轉入“使用”。為了避免B車輸出制動,根據CBTC的運用經驗,這種情況下已經延伸到閉塞分區內的B車MA不回撤。在B車進入閉塞分區2前,可能出現兩種情況。
情況1:A車已出清閉塞分區2。閉塞分區2空閑,當B車進入閉塞分區2后,閉塞分區2轉入“占用鎖閉”(條件5),后續列車的MA可延伸到B車的安全車尾處。由于A車無線通信中斷,其占用的閉塞分區工作狀態為“使用”,所以B車的MA終點為A車所在閉塞分區的入口處。
情況2:A車未出清閉塞分區2。當B車進入閉塞分區2后,此時即使A車出清閉塞分區2,由于B車MA終點至閉塞分區2的“盲區”,RBC不會向B車發送新的MA。B車以目視模式行車,當通過TAF確認后,RBC向車載設備發送MA,MA終點為無線通信中斷A車占用的閉塞分區入口處。
4 結語
本文分析了現階段高速鐵路CTCS-4級列控系統應用面臨的問題,提出一種基于CTCS-3級列控系統的高速鐵路移動閉塞方案。高速鐵路是一個復雜的系統,行車許可計算直接關系到行車安全,本文的行車許可計算方法基于安全運用多年的CTCS-3級列控系統,變更內容和系統風險更加可控,并通過運營場景對算法進行了驗證。本方案地面子系統結構和硬件接口與CTCS-3級列控系統完全相同,實際改造的工程量較小,有利于在線路上驗證實施。既有CTCS-2/3級列控系統,基本邏輯都是一個閉塞分區只允許一輛列車進入,而移動閉塞打破了這種概念,這在高鐵線路未有先例,所以本文的研究探索在工程應用之前,細節還需要進一步的論證。