基于網(wǎng)絡(luò)的自行小車控制原理的研究
2019-10-15 03:01:48董加旺
工程建設(shè)與設(shè)計(jì) 2019年18期
關(guān)鍵詞:信號(hào)
董加旺
(承德市五一四地質(zhì)大隊(duì),河北承德067000)
1 引言
傳統(tǒng)的自行小車控制系統(tǒng),小車的控制是通過軌道內(nèi)的滑觸線進(jìn)行控制的,根據(jù)小車不同的功能對(duì)滑觸線進(jìn)行分段控制,每一段滑觸線對(duì)應(yīng)一個(gè)信號(hào)接入地面控制站,小車的功能越多,需要的滑觸線也越多,分段也越復(fù)雜。為了解決這個(gè)問題,出現(xiàn)了通過編碼控制小車的輸送系統(tǒng),但通過編碼也需要對(duì)滑觸線進(jìn)行分段,在進(jìn)行工藝調(diào)整時(shí)仍需對(duì)滑觸線進(jìn)行調(diào)整,針對(duì)這個(gè)問題,本文提出了基于網(wǎng)絡(luò)的無分段控制信號(hào)的設(shè)計(jì)方案。
在新方案中,滑觸線只為小車提供電源,小車的控制信號(hào)通過有線或無線通信的方式進(jìn)行傳輸,對(duì)空中軌道進(jìn)行工位劃分及功能定義,通過工位識(shí)別功能鎖定小車,將工位調(diào)度指令寫入工位內(nèi)的小車,控制小車執(zhí)行相應(yīng)動(dòng)作。在進(jìn)行工藝調(diào)整時(shí),只需對(duì)軌道功能進(jìn)行重新劃分及功能定義即可實(shí)現(xiàn)工藝調(diào)整,無需對(duì)滑觸線進(jìn)行調(diào)整,使自行小車輸送系統(tǒng)更具柔性化,基本上滿足了現(xiàn)代工業(yè)生產(chǎn)的需求[1]。
2 基于網(wǎng)絡(luò)的自行小車控制原理
本文通過一個(gè)示例項(xiàng)目介紹基于網(wǎng)絡(luò)控制的自行小車的控制原理及控制方法,在本方案中,設(shè)有1個(gè)上件工位、1個(gè)下件工位、1個(gè)檢修工位、1個(gè)檢修道岔、3個(gè)受控緩存工位、2個(gè)自動(dòng)緩存工位,如圖1所示。
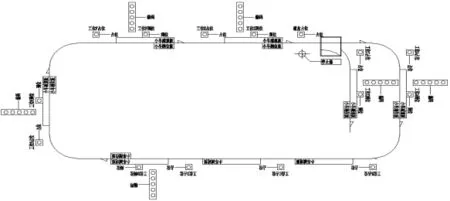
圖1 測(cè)試平臺(tái)
2.1 功能分析
在項(xiàng)目設(shè)計(jì)初期,根據(jù)技術(shù)要求對(duì)工藝線路進(jìn)行規(guī)劃,確認(rèn)每個(gè)工位的功能并進(jìn)行功能設(shè)計(jì),以上件工位為例,上件工位主要完成工件的上件任務(wù),并將工件轉(zhuǎn)移到下一工位,其控制流程如圖2所示。
小車運(yùn)行到上件工位,小車發(fā)號(hào)板觸發(fā)占位檢測(cè)信號(hào),上件工位占位,工位發(fā)號(hào)板觸發(fā)小車減速開關(guān),小車自動(dòng)減速,小車發(fā)號(hào)板觸發(fā)讀碼檢測(cè),工位讀取小車代碼,小車發(fā)號(hào)板觸發(fā)到位檢測(cè),小車停止運(yùn)行。小車運(yùn)行到位后,自動(dòng)下降,上件完成后,自動(dòng)上升至高位,上件完成,并轉(zhuǎn)運(yùn)至下一工位。根據(jù)控制流程為上件工位布置開關(guān)如圖3所示。
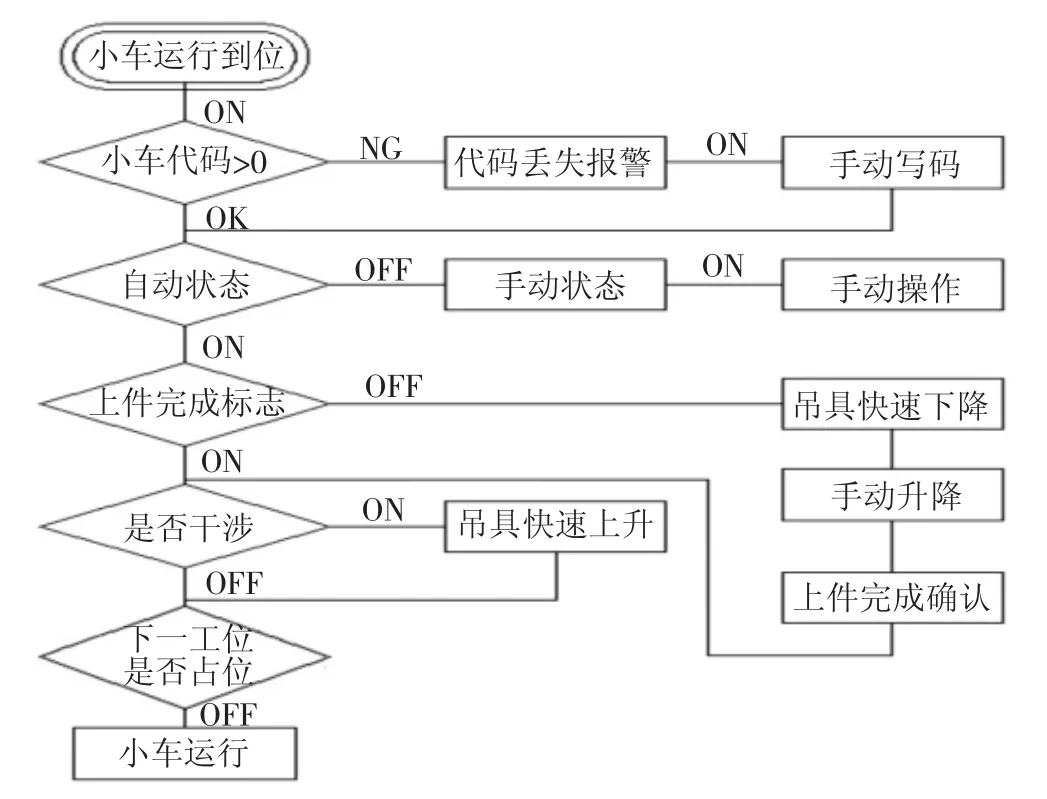
圖2 控制流程
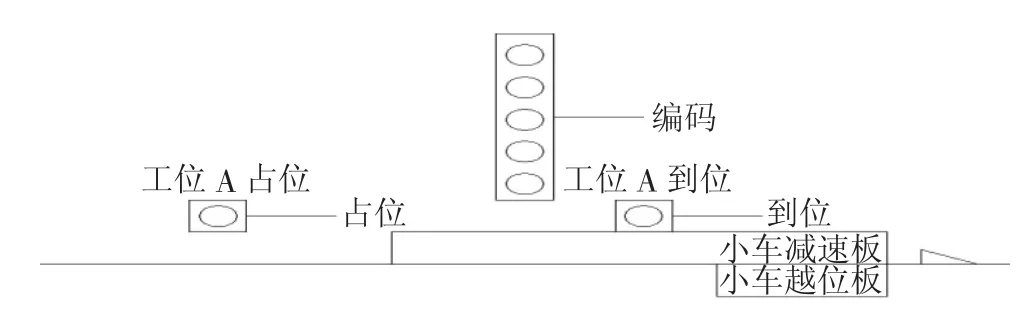
圖3 開關(guān)布置
其中,占位與到位信號(hào)主要用于工位之間的調(diào)度程序,編碼信號(hào)主要用于識(shí)別小車編號(hào)。在識(shí)別編號(hào)時(shí),小車應(yīng)處于低速狀態(tài),有利于編號(hào)的識(shí)別,小車減速板主要用于小車的緩起緩?fù)#≤囋轿话逯饕糜谛≤嚐o法正常停止時(shí)的越位保護(hù)。
下件工位主要完成工件的卸載任務(wù),下件完成后小車空載轉(zhuǎn)移到下一工位,其控制流程與上件工位類似可參考圖2,其元件布置可參考圖3。
受控緩存工位和自動(dòng)緩存工位都是自行小車的臨時(shí)停車位,區(qū)別在于受控緩存工位小車的運(yùn)行停止由地面調(diào)度站控制,自動(dòng)緩存工位小車的運(yùn)行停止是小車根據(jù)運(yùn)行中的干涉狀態(tài)自動(dòng)啟停。其元件布置可參考圖1。
2.2 控制分析
傳統(tǒng)的自行小車控制系統(tǒng)只需要知道工位有沒有車,就可以通過滑觸線信號(hào)控制小車。基于網(wǎng)絡(luò)控制的自行小車所有的控制信號(hào)及狀態(tài)信號(hào)都是通過網(wǎng)絡(luò)傳輸?shù)摹F淇刂葡到y(tǒng)不但需要知道哪個(gè)工位有車,還需要知道是哪臺(tái)小車,才能準(zhǔn)確地將控制信號(hào)發(fā)送給小車,小車也必須將知道處于哪個(gè)工位,才能將狀態(tài)信號(hào)準(zhǔn)確的發(fā)送給所在的工位。因此,通過網(wǎng)絡(luò)控制自行小車需要解決以下3個(gè)問題:
1)地面站通過工位讀碼能知道小車的位置,但小車沒有讀碼功能,如何讓小車知道當(dāng)前是哪個(gè)工位?
2)每個(gè)工位在不同時(shí)段會(huì)有不同的小車,如何將工位信號(hào)發(fā)送給每個(gè)工位對(duì)應(yīng)的小車?
3)小車運(yùn)行時(shí)會(huì)在多個(gè)工位穿梭,如何將小車的狀態(tài)信號(hào)發(fā)送給所在的工位?
針對(duì)第1個(gè)問題,可以通過工位讀出的小車編碼轉(zhuǎn)換成小車的工位號(hào)碼,例如:
工位1讀取小車碼為1時(shí),將1號(hào)車的工位編號(hào)寫1;
工位1讀取小車碼為2時(shí),將2號(hào)車的工位編號(hào)寫1;
工位2讀取小車碼為1時(shí),將1號(hào)車的工位編號(hào)寫2;
工位2讀取小車碼為2時(shí),將2號(hào)車的工位編號(hào)寫2。
總結(jié)以上規(guī)律編程后,可自動(dòng)實(shí)現(xiàn)小車代碼與工位編號(hào)的映射,如圖4所示。

圖4 代碼映射例程
圖4顯示,工位1的小車代碼為2,小車2的工位代碼為1,符合預(yù)期。
針對(duì)第2個(gè)問題,通過比較工位讀出的小車編碼,將控制信號(hào)發(fā)送到對(duì)應(yīng)的小車,例如:
工位1讀取小車碼為1時(shí),將控制指令發(fā)送給1號(hào)車;
工位1讀取小車碼為2時(shí),將控制指令發(fā)送給2號(hào)車;
工位2讀取小車碼為1時(shí),將控制指令發(fā)送給1號(hào)車;
工位2讀取小車碼為2時(shí),將控制指令發(fā)送給2號(hào)車。
總結(jié)以上規(guī)律編程后,可自動(dòng)實(shí)現(xiàn)工位發(fā)送指令與小車接收指令的映射,如圖5所示。
圖5顯示,工位1處的小車為2,工位1的指令發(fā)送給了小車2,符合預(yù)期。
針對(duì)第3個(gè)問題,可以通過比較小車存儲(chǔ)的工位編號(hào),將狀態(tài)信號(hào)發(fā)送到對(duì)應(yīng)的工位,例如:
小車1存儲(chǔ)工位號(hào)為1時(shí),將狀態(tài)信號(hào)發(fā)送給工位1;
小車1存儲(chǔ)工位號(hào)為2時(shí),將狀態(tài)信號(hào)發(fā)送給工位2;
小車2存儲(chǔ)工位號(hào)為1時(shí),將狀態(tài)信號(hào)發(fā)送給工位1;
小車2存儲(chǔ)工位號(hào)為2時(shí),將狀態(tài)信號(hào)發(fā)送給工位2。
總結(jié)以上規(guī)律編程后,可自動(dòng)實(shí)現(xiàn)小車狀態(tài)區(qū)與工位接收區(qū)的映射,如圖6所示。

圖5 指令映射例程

圖6 狀態(tài)映射例程
圖6顯示,小車1在工位2,小車1的狀態(tài)信號(hào)發(fā)送給了工位2,符合預(yù)期。
解決了這3個(gè)問題,工位與小車之間通過編碼自動(dòng)實(shí)現(xiàn)了內(nèi)部變量的映射,在進(jìn)行邏輯編程時(shí),只需要調(diào)用變量即可,無須再考慮應(yīng)該去控制哪臺(tái)車,或采集哪臺(tái)小車的狀態(tài)信號(hào)。
3 結(jié)語
基于網(wǎng)絡(luò)的自行小車輸送系統(tǒng),采用先進(jìn)的網(wǎng)絡(luò)技術(shù)與控制技術(shù),簡(jiǎn)化了控制系統(tǒng)的結(jié)構(gòu),提升了自行小車的易用性及可靠性。采用模塊化設(shè)計(jì)及結(jié)構(gòu)化編程,使設(shè)計(jì)圖紙及程序更通用,能極大地提高設(shè)計(jì)效率。在進(jìn)行工藝調(diào)整時(shí),通過增加或減少部分外圍硬件及調(diào)整程序即可實(shí)現(xiàn),能極大地降低施工難度[2]。地面系統(tǒng)與小車的交互信號(hào)全部通過網(wǎng)絡(luò)傳輸,能夠提供更多的控制信號(hào)及狀態(tài)信號(hào),通過編程可實(shí)現(xiàn)更多更復(fù)雜的動(dòng)作,解決了傳統(tǒng)自行小車在進(jìn)行復(fù)雜設(shè)計(jì)時(shí)的一些弊端。
基于網(wǎng)絡(luò)的自行小車輸送系統(tǒng),是目前國內(nèi)外同類產(chǎn)品的發(fā)展趨勢(shì),有極高的研究及應(yīng)用價(jià)值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評(píng)價(jià)·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(hào)(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:10
鐵道通信信號(hào)(2016年11期)2016-06-01 12:11:32
鑿巖機(jī)械氣動(dòng)工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
