基于MATLAB的直流調壓調速控制系統的仿真
2019-10-17 05:48:34周子健張飛
中小企業管理與科技 2019年26期
周子健,張飛
(1.內蒙古科技大學,內蒙古 包頭014030;2.鄂爾多斯電業局,內蒙古 鄂爾多斯014010)
1 引言
本文的設計主要建立在雙閉環系統的理念之上。該系統是近期來說同種類型的系統當中,應用最為廣泛的系統。其有著很多比別的系統更加出色的優點,例如,與其他系統相比,其動態響應更快、抗干擾能力也更強[1]。雙閉環直流調速系統在很多行業都有應用,由于直流電動機的起動制動性能較為優秀,可以非常順暢地調節速度,因此,本文采用這種系統來設計直流調壓調速控制系統。
2 直流調壓調速控制系統的設計
2.1 本文所述系統的總設計
本文所述系統采用的是普遍使用的三相橋式整流電路,所設計出來的直流調壓調速控制系統具有能夠無靜差調速、系統穩定等優點。
2.2 本文所述系統的組成和設計
本文所述系統原理的框圖如圖1所示。
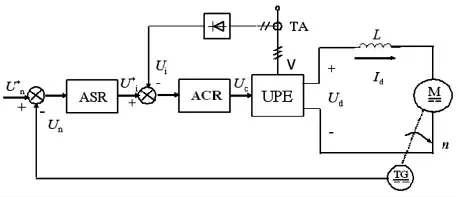
圖1 系統原理框圖
本文所述設計需要令系統實現轉速的負反饋和電流的負反饋,因此,本文為了實現這兩個機制,在設計的系統當中設計了兩個分別用來調節電流和轉速的調節器。把調節電流的調節器放在了稍靠內部的部分,把另一個調節器放在了外部。這兩個調節器一內一外,共同組成了雙閉環調速的系統。
2.2.2 電流調節器的設計
本文設計當中的一些相關數值,整流裝置滯后時間常數Ts=0.0017s;電流濾波時間常數Toi;三相2 橋式電路的每個波頭的時間3.3ms。
為了使系統能夠更平穩地工作,這些數值應該遵守公式(1~2)Toi=3.3ms,根據此公式,可以計算得出Toi的數值,即為0.002s;根據上述數值,可以求出電流環小時間常數的和,用T∑i符號來表示。根據計算得出T∑i=Ts+Toi=0.0037s。接下來需要計算出電磁時間常數的具體數值,其用Tl符號來表示。根據之前所得出的數值可以求出電樞回路總電感,具體公式為:Ll=K1隨后便可以根據公式得出Tl的值
2.2.3 選擇電流調節器的結構
根據本文的設計要求,要保證σi≤5%,除此之外,還要盡量維持穩態電流沒有靜差,所以根據以往設計,本文的設計可以采用典型I 類型系統來設計上述提到的電流調節器,根據其他要求,具體使用的為PI 型。該種類型的傳遞函數是WACR(s)
2.2.1 電流截止負反饋系統
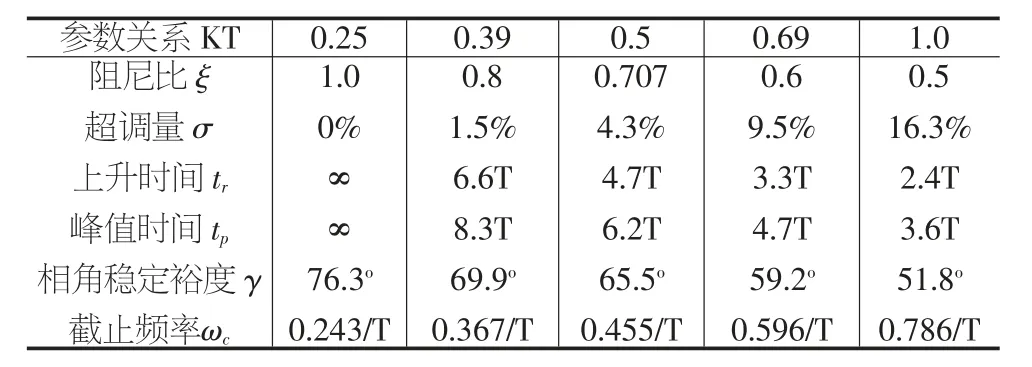
表1 典型I 型系統動態跟隨性能指標和頻域指標與參數的關系
2.2.4 計算電流調節器的參數
本文所述系統還需要計算出ACR 比例系數,具體計算的過程如下:
由 τi=Tl=0.0182s;KITΣi=0.5可以計算出=135.1×0.0182×0.56/(36×0.024)=1.594,即為ACR 比例系數。
3 基于MATLAB/SIMULINK的調速系統的仿真
在進行完上文所述的各個設計過程之后,可以利用相關軟件對設計出的系統進行仿真工作。需要建立起相關的動態數學模型,將已經求出來的數值代入就可以得到動態模型。
為了分析本文設計出的模型的特性,需要在兩個調節器的輸出端設置相應的限幅值,根據本文的設計的模型的相關數值,選取的限幅值是±13V。選取完數值之后,就可以正式對本系統進行仿真。
根據仿真結果,可以非常直觀地看出系統中轉速的變化,根據仿真結果的數值,可以計算出轉速的超調量100%=1.67%。
這個數值表示所設計出的系統的仿真結果在大體上滿足了最初設計的要求,但是與理論計算相比,還是有一定量的誤差。例如,在0.9~1.3s,系統出現了擾動現象,但在出現之后的很短一段時間之后,轉速又達到了穩定的狀態。這就是本系統設計的兩個調節器在起作用,因此,此次仿真基本滿足設計的要求。
4 結語
本文設計出的系統在進行仿真實驗之后被證明是符合要求的,因此,對于不同的能夠應用到本系統的場景,相關人員可以根據具體情況作出適當的調整,使辦事效率更加迅速。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17