基于Visual C++的熱電偶時間常數測量研究
2019-10-18 08:25:02胡俊宏夏春明李珊珊
重型機械 2019年5期
關鍵詞:測量
胡俊宏,姜 帥,夏春明,李珊珊
(1.沈陽工業大學 機械工程學院,遼寧 沈陽 110870; 2.沈陽東大傳感技術有限公司,遼寧 沈陽 110117)
0 前言
隨著科學技術水平的飛速發展與生產水平的逐步提高,人們在生產生活中對于溫度的測量與控制有著更高的要求。為了提高控制性能達到理想的預期效果,就必須保證溫度傳感器對于所測的物理量信號變化能夠及時感測并且將其準確地轉變為電信號[1-3]。熱電偶是測溫儀表中常用的測溫元件,由于熱電偶具有對溫度響應靈敏、制作簡單、性能穩定且測溫范圍較廣等優點,廣泛應用于航空航天、冶金化工、機械制造、醫藥、水泥、玻璃、國防軍事等工業測控領域中[4,5]。由于時間常數是衡量熱電偶動態性能的重要指標之一,其值的大小反映了熱電偶熱響應時間的快慢[6]。因此也是廠家選購和使用熱電偶的重要依據,所以對熱電偶時間常數的測量具有重要的工程意義。常見熱電偶工作溫度范圍在-200℃到2 800℃不等[7-9]。熱電偶時間常數受很多因素的影響,包括制作熱電偶的材料、幾何參數以及測量環境中的水域溫度、水流速度等[10-12]。因此設計一套能夠準確測量熱電偶時間常數的測試系統具有重要意義。
本文設計了一套熱電偶溫度傳感器時間常數測量系統。在分析了K型熱電偶時間常數特點的前提下,基于Visual C++6.0開發一款用于驅動數據采集卡PCI-1716L的MFC軟件,通過該軟件采集與分析數據。計算機將處理后的數據發送至PLC控制分揀機構進行分揀操作。通過實驗室和現場實驗,證明了該設備所測結果的有效性和可靠性。
1 時間常數測試原理
由于溫度傳感器的溫度變化曲線是反映實測溫度隨著時間變化而變化的曲線,傳統模型認為其變化曲線特性符合一階線性系統的動態響應特性[13]。根據一階線性系統響應特性,其響應狀態方程可表示為
(1)
式中,τ為熱電偶時間常數;T為熱電偶實測溫度;T0為熱電偶初始溫度;T1為最終溫度;t為階躍所需時間。
當t=τ時,式(1)變為
T-T0=(1-e-1)(T1-T0)=0.632(T1-T0)
(2)
當熱電偶實際溫度升到最終溫度T1與初始溫度T0差值的63.2%處所用的時間為熱電偶的時間常數值。熱電偶隨溫度動態響應曲線如圖1所示。

圖1 熱電偶溫度階躍響應曲線
熱電偶的工作原理是半導體材料的熱電效應,又叫塞貝克效應[14]。根據冷端與熱端溫度不同,組成熱電偶的兩種不同半導體在這種狀態下將產生電勢差[15]。當兩種電子密度不同的半導體接觸時,導致兩個方向電子擴散率不同,在兩半導體接觸面上形成靜電場,阻礙擴散運動,加速反向運動。一旦達到動態平衡,在兩種半導體間將形成電勢差,稱為接觸電勢[16-18]。當溫度傳感器的兩種制造材料一定時,所產生的電勢差僅與熱端溫度有關。溫度越高,電子越活躍,所產生的接觸電勢差越大[19]。
本次用于實驗的熱電偶類型均為K型熱電偶,用于標定熱電偶時間常數測試實驗條件為:室溫25℃,水域恒溫95℃,水流速度0.3~0.5 m/s。然后通過同步數據采集卡PCI-1716L對熱電偶由室溫到水溫產生的信號進行測量,通過計算機對采集的數據處理,從而獲取熱電偶的動態響應曲線。通過算法尋找達到階躍溫度(T1-T0)的63.2%時刻,確定時間常數τ值。
2 測試系統設計
2.1 測試系統硬件組成
熱電偶測試系統主要結構關系如圖2所示。觸摸屏作為操作盤接受人工操作。使用PLC作為控制器。數據采集裝置由數據采集卡PCI-1716與隔離熱電偶輸入模塊ADAM-3011組成,用于采集數據。
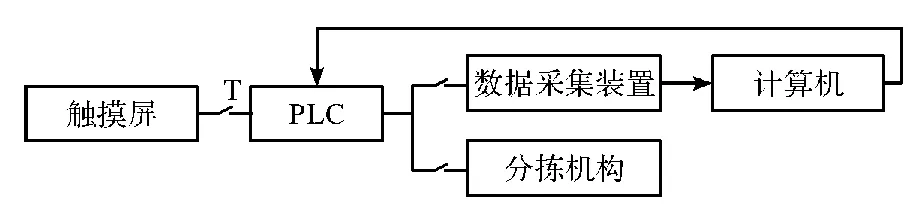
圖2 熱電偶測試系統示意圖
PLC控制機械手夾持待測熱電偶伸入恒溫水槽,經隔離熱電偶輸入模塊ADAM-3011將信號放大,由PCI-1716L數據采集卡獲取電壓信號并輸入計算機,通過軟件分析獲取時間常數值,根據預設的分檔規則自100 ms起每10 ms為一個檔位,在計算機內部進行分檔處理。數據處理后通過數據采集卡的六個開關量輸出通道將測量結果發送給PLC,使其控制分揀系統將該熱電偶送入對應檔位。
2.2 測試系統軟件設計
測試系統的軟件選用Visual C++ 6.0軟件與研華官方提供的DAQPro控件進行編寫,測試軟件分為三個模塊。分別是時間常數測量模塊、穩定性檢驗模塊與歷史記錄查看模塊。測試系統軟件如圖3所示。所編寫的軟件操作界面如圖4所示。
為了測試該設備的穩定性,現要求對于同一只熱電偶進行多次測量,根據廠家要求,多次測量結果極差不大于20 ms,即可認為穩定性較為可靠。該設備穩定性校驗模塊流程圖如圖5所示。
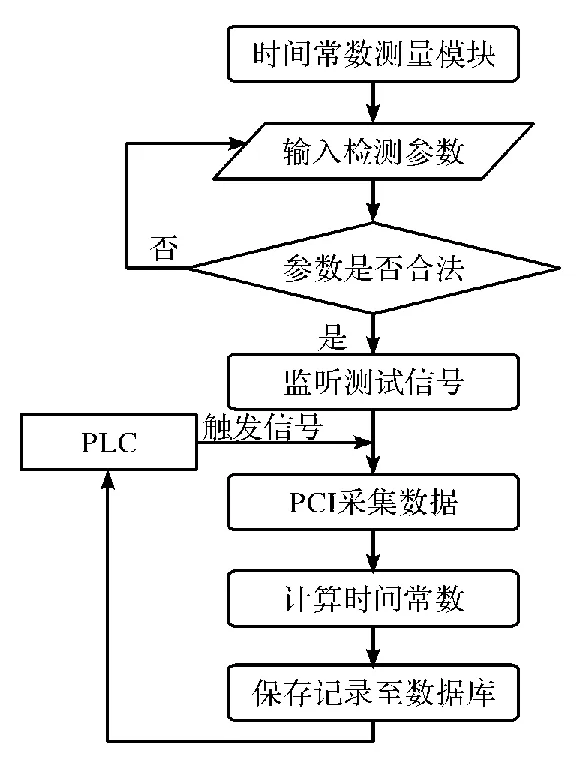
圖3 時間常數測量模塊流程圖
圖4 軟件操作界面
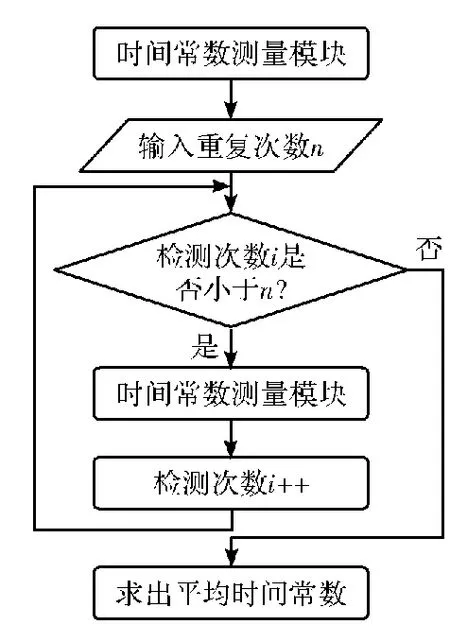
圖5 穩定性校驗模塊流程圖
2.3 數據處理
一般認為熱電偶動態響應曲線符合一階線性系統動態響應的單指數函數數學模型[20-21]。將數據采集卡采集到的數據輸入到軟件內存中,作為原始數據。由于熱電偶測試入水前存在被水蒸氣加熱的過程,通過實驗修正,以極差的5%作為熱電偶入水時刻的起始點值,達到極差60%處的時間τ′開始求時間常數,以實測曲線與τ′的標準曲線的方差為考查量,向最大值方向一維搜索。經過迭代后求出方差最小的時刻所對應的時間即為時間常數τ。
3 測試結果與分析
3.1 實驗結果
本文測試的熱電偶均為鎳鉻-鎳硅制造的 鎧裝K型熱電偶。對一只該型號熱電偶進行實驗,實驗條件水溫為94℃,室溫約為25℃,水流速0.4 m/s。按圖4流程圖操作軟件。當PLC有測試觸發信號時,軟件開始進行測量。經過測量,得時間常數值為0.168 s,現場測試曲線如圖6所示。
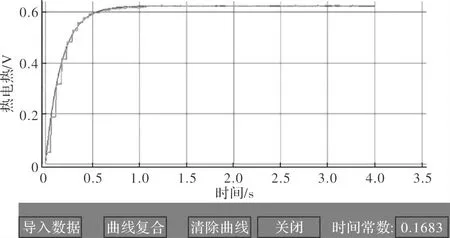
圖6 時間常數測試結果
由圖6可以看出,所求的時間常數τ繪制處的曲線與實測曲線擬合程度較好,達到預期效果。
3.2 測試結果重復性
為探求測試方法結果的可靠性,取同一熱電偶利用穩定性校驗模塊進行測量,每次測量前需保證熱電偶已經冷卻至室溫。測量結果如表1所示。
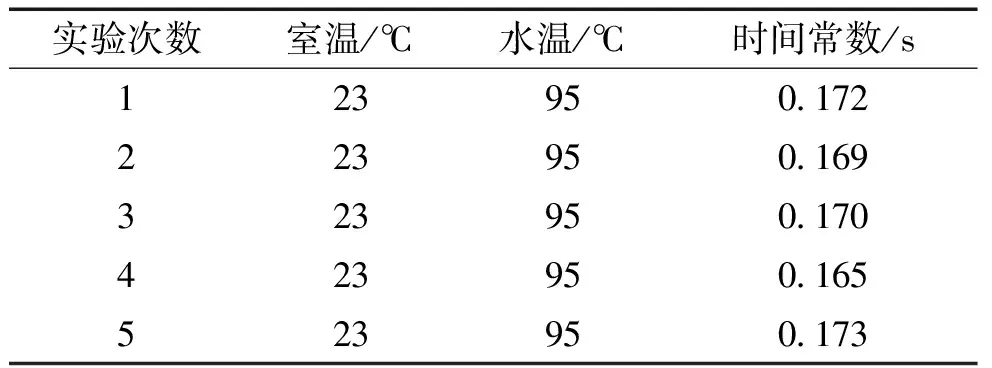
表1 K型熱電偶重復性實驗數據
對同一熱電偶時間常數測量的結果誤差不大于20 ms,可以認定該設備所測的時間常數結果具備參考價值。
4 結束語
本文針對K型熱電偶的時間常數進行了測量,設計了一臺從測量到分揀的自動化設備。經過實驗室實驗與現場實際測量,該設備測試效率與檢測精度與傳統手工檢測相比都有極大提高。測試結果對熱電偶溫度傳感器的研究與應用具有重要參考價值,對提高企業的生產效率與經濟效益具有顯著的效果。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
