基于ISO 1328-1:2013的齒距偏差評定方法
2019-10-18 07:26:30魏建杰石照耀
測控技術 2019年9期
魏建杰,湯 潔,石照耀
(北京工業大學北京市精密測控技術與儀器工程技術研究中心,北京 100124)
齒輪作為關鍵零部件,其質量和精度等級直接影響設備的性能、安全和壽命,齒輪測量和精度評價是保證齒輪質量的主要途徑[1]。齒輪測試技術及相關軟件開發是現代齒輪工程領域的重要工作內容之一[2-3]。
齒輪單項偏差包括齒距偏差、齒廓偏差和螺旋線偏差。齒距偏差是齒輪評定的重要指標,是由于各個齒沿圓周分布不均勻導致的,對齒輪使用的效率、噪聲、運動精度和使用壽命有重要影響[4-5]。
ISO 1328-1作為圓柱齒輪核心的精度標準之一,對齒輪單項偏差基本要素的定義、測量位置、誤差評定和公差值計算等給出了詳細闡述。目前最新的修訂版本為 ISO 1328-1:2013[6]。標準 ISO 1328-1:2013 對齒距偏差評定中的定義及符號做了新規定。對齒距偏差評定的實施規范也有相關標準[7-9]。
本文主要研究基于ISO 1328-1:2013的齒距偏差定義及評定方法,給出評定流程,并開發了齒距偏差評定軟件,實施齒距偏差評定過程。
1 齒距偏差定義及評定方法
1.1 相關定義
針對齒距偏差評定,圓柱齒輪精度國際標準ISO 1328-1:2013(下文簡稱“新標準”)中,給出了齒距偏差各項指標的定義和評定方法,包括任一單個齒距偏差(Individual Single Pitch Deviation,fpi)、單個齒距偏(Single Pitch Deviation,fp)、任一齒距累積偏差(Individual Cumulative Pitch Deviation,Fpi)、齒距累積總偏差(Total Cumulative Pitch Deviation,Fp)。在齒距偏差的測量與評定中,標準對各項偏差的數值符號做了嚴格規定。與ISO 1328-1:1995(下文簡稱“舊標準”)關于齒距偏差定義的對比[10],如表1所示。“新標準”中給出了齒距偏差評定如圖1所示。
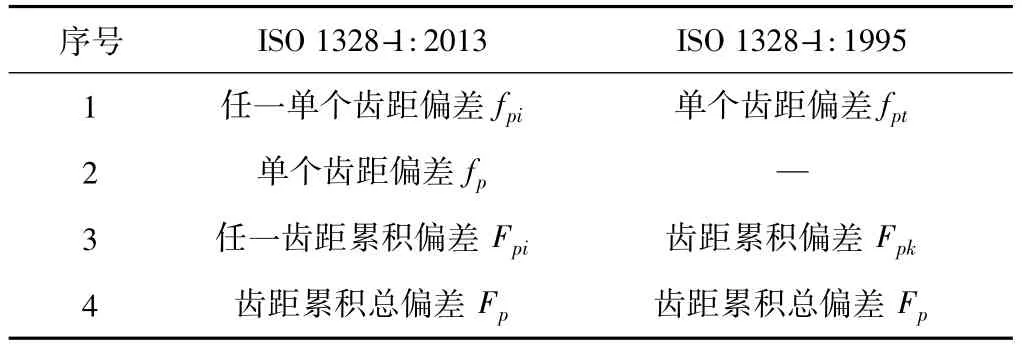
表1 齒距偏差定義對比
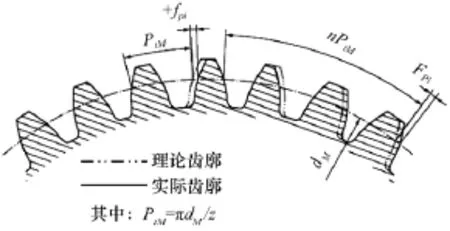
圖1 齒距偏差評定
1.1.1 任一單個齒距偏差fpi
沿齒輪測量圓的橫截面中的實際齒距與相應的理論齒距的代數差。該數值對應于任一齒面從理論位置到相鄰齒的同側齒面的位移。對于左齒面和右齒面,有與齒數相同的 fpi值。“舊標準”中僅定義為單個齒距偏差 fpt。
對于數值fpi的代數符號,“新標準”中規定如下:在指定的測量方向(順時針或逆時針),實際齒廓位置比其理論位置更靠近前一齒廓時定義為負(-)偏差;實際齒廓位置比其理論位置更遠離前一個齒廓時定義為正(+)偏差。
1.1.2 單個齒距偏差fp
fp是指所有任一單個齒距偏差的最大絕對值,為無符號數值。左齒面和右齒面的fp分別測量。“舊標準”中定義的單個齒距偏差fpt,為有符號數值。
1.1.3 任一齒距累積偏差Fpi
Fpi是指n個相鄰齒距的理論弧長與實際弧長的代數差。n從1~z不等;對于左齒面和右齒面,Fpi數值的個數與齒數相同。理論上,它等于n個任一單個齒距偏差的代數和。它對應于任一齒面從理論位置相對于基準齒面的位移。“舊標準”中定義為齒距累積偏差Fpk,其中,k取2~z/8弧段內。
對于讀數Fpi的方向和代數符號,“新標準”中規定如下:在指定的測量方向(順時針或逆時針),實際齒側位置比基準齒側更靠近理論位置時定義為負(-)偏差,否則認為是正(+)偏差。
1.1.4 齒距累積總偏差Fp
齒輪同側齒面所有齒上的齒距累積偏差的最大代數差。
對于讀數Fp的方向或代數符號沒有做出正負規定。這種正負規定將需要指定任意兩齒之間的方向(順時針或逆時針)的符號。左齒面和右齒面分別測量。
1.2 齒距偏差評定
根據“新標準”,齒距偏差評定[8-10]如圖2所示。
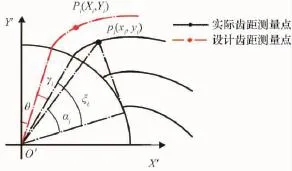
圖2 齒距偏差評定
對于任意齒距測量點(xi,yi),根據漸開線原理計算該點對應的展角ξi(rad):

根據漸開線方程,得到對應展角的設計齒廓上的齒距點的坐標(Xi,Yi):

式中,rb為基圓半徑;ξi為漸開線展角。
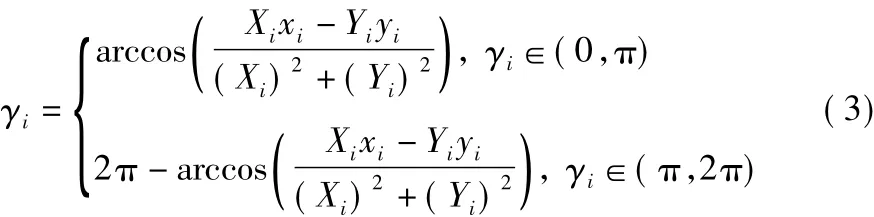
將設計齒廓繞著工件坐標系原點旋轉,使設計齒廓依次通過各個齒距測量點。根據式(5)計算設計齒廓通過每個測量點時的轉角γi/rad。
任一齒距累積偏差的數值{Fpi},由式(4)得到。

齒距累積總偏差為

任一單個齒距偏差為

單個齒距偏差為

式中,r為分度圓半徑,r=mz/2;m為模數;z為齒數。
1.3 數值舍入原則
齒距偏差評定計算結果的數值或齒距公差計算數值應按以下舍入原則進行取整:如果數值大于10 μm,則圓整至最接近的整數微米;如果數值大于5.0 μm但小于或等于10 μm,則精確到0.5 μm;如果數值小于5.0 μm,則精確到0.1 μm;如果測量儀器的讀數為英制英寸,則計算出的數值應轉換為1‰英寸,然后按照微米規則進行四舍五入(即用“1‰英寸”用于上述規則中的“微米”)。
1.4 齒距偏差公差允許值
單個齒距公差fpT:

齒距累積總公差 FpT:

式中,A為精度等級。
2 齒距偏差評定軟件
根據“新標準”對齒距偏差評定中的相關規定,設計齒距偏差評定流程如圖3所示。
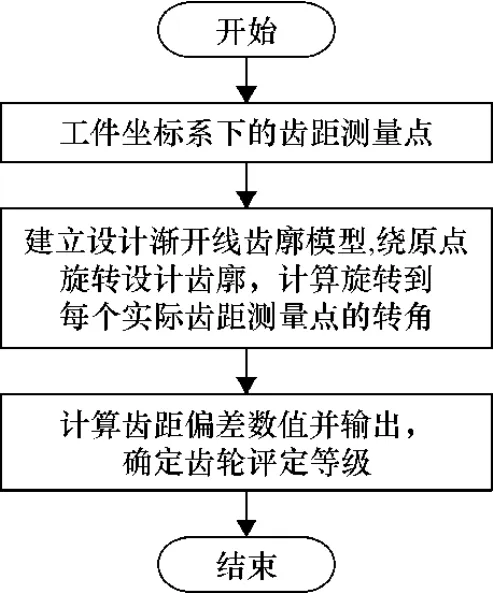
圖3 齒距偏差評定流程
根據上述齒距偏差評定方法,采用Matlab進行軟件編程,實現對齒距偏差的評定及結果顯示。軟件共分為4個模塊:①參數輸入模塊;②參數計算模塊;③評定曲線顯示模塊;④評定結果顯示模塊。
3 試驗
被測齒輪為漸開線圓柱直齒輪,基本參數見表2。
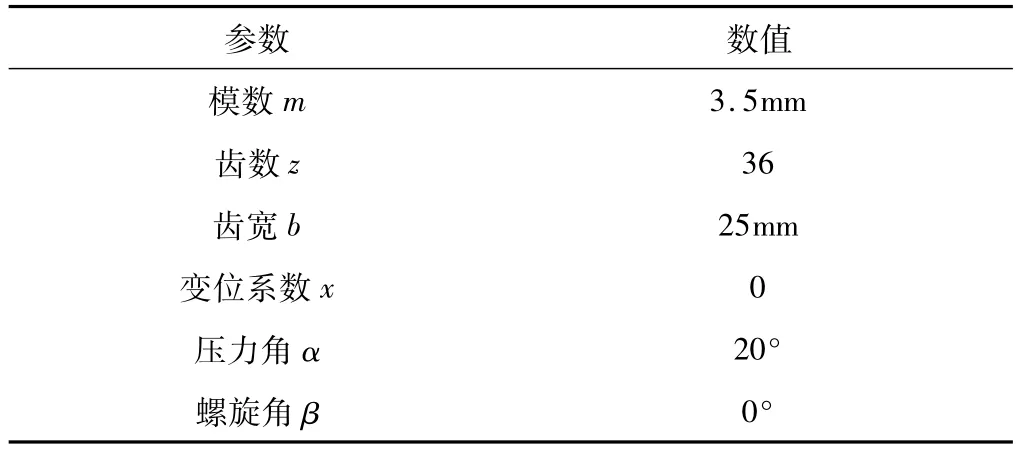
表2 齒輪參數
在齒輪測量中心上進行被測齒輪的齒距偏差測量。其中,部分齒距測量數據如表3所示。
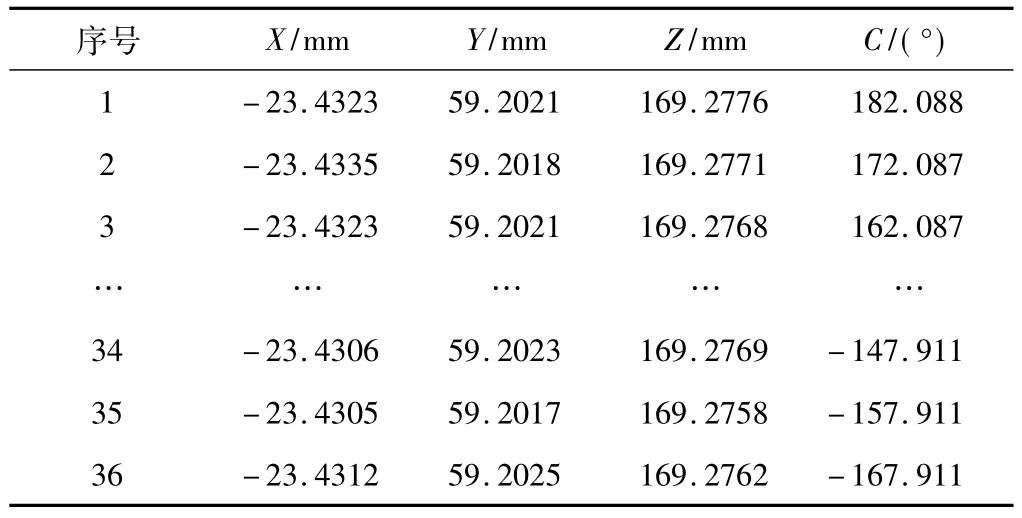
表3 齒輪測量數據
其中,X、Y、Z和C分別代表齒輪測量中心的三個坐標讀數以及回轉軸讀數。
根據被測齒輪基本參數計算齒輪分度圓半徑并進行齒距偏差評定,對比基于新舊標準的齒距偏差評定結果如表4所示。

表4 齒距偏差評定結果對比 單位:μm
其中依據ISO 1328-1:1995的評定結果由齒輪測量中心給出評定數值,依據ISO 1328-1:2013的評定結果為基于“新標準”的齒距偏差評定數值。
由上述結果可以看出基于ISO 1328-1:2013的齒距偏差評定結果與齒輪測量中心基于其上一版標準ISO 1328-1:1995得到的評定結果基本一致,對于單個齒距偏差,ISO1328-1:2013定義為無符號數值,取任一單個齒距偏差的絕對值的最大值,因此數值為正。
將上述齒輪基本參數和齒距測量數據載入齒距偏差評定軟件,得到齒距偏差評定結果界面如圖4所示。
4 結束語
依據圓柱齒輪精度國際標準ISO 1328-1:2013中的齒輪齒距偏差的定義及評定方法,給出了齒距偏差評定方法及計算公式,設計了ISO1328-1:2013齒距偏差評定流程,并開發了齒距偏差評定軟件。進行了基于標準的兩個版本(2013版和1995版)的齒距偏差評定結果的對比。所給出的齒輪齒距偏差評定方法及軟件為應用ISO 1328-1:2013進行齒距偏差評定提供了參考。
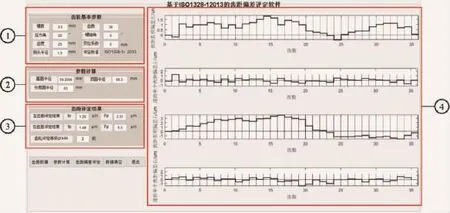
圖4 齒距偏差評定結果界面
猜你喜歡
幼兒園(2021年6期)2021-07-28 07:42:14
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小學生學習指導(低年級)(2019年11期)2019-11-25 07:31:48
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
小學生導刊(2017年13期)2017-06-15 20:29:38
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
山東青年(2016年1期)2016-02-28 14:25:25
天津科技大學學報(2015年4期)2015-04-16 04:55:11
當代修辭學(2014年3期)2014-01-21 02:30:44
