立體視覺在結構檢測中的應用
2019-10-21 09:41:10
福建質量管理 2019年19期
(廣東工業大學土木與交通工程學院 廣東 廣州 510006)
一、基本原理
(1)立體視覺測量是利用兩臺攝像機從不同角度對空間物體進行圖像采集,根據視差原理能夠得到空間物體的三維坐標[1]。
(2)利用圖像分析技術進行相關性分析追蹤兩幅圖像和進行精確匹配,最終得到結構檢測點的三維坐標[2]。
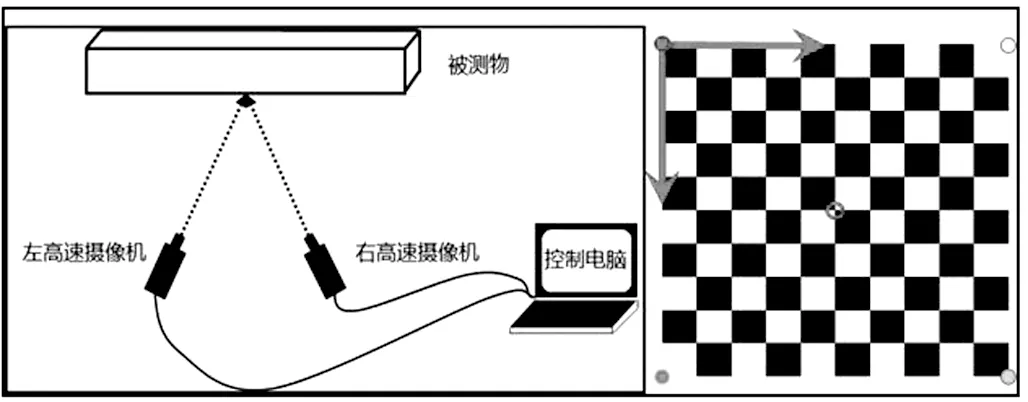
圖1 立體視覺系統及標定板
二、實驗設備
(1)棋盤格標定板。一個棋盤格為25mm*25mm。
(2)攝像機2臺。攝像機參數 CCD尺寸,CCD靶面尺寸1/4″,有著很好的成像效果,支持PAL和NTSC這兩種制式,實際焦距為f=5.6-95.2mm,焦距29.3-499mm,光圈F1.9-F16,濾鏡直徑77mm,液晶屏、取景器尺寸3.5英寸,對焦范圍廣角:50mm-無窮遠,快門速度在1/32-1/2000秒之間。
(3)實驗對象為橋梁結構。
圖2 單反相機

圖3 橋梁結構模型
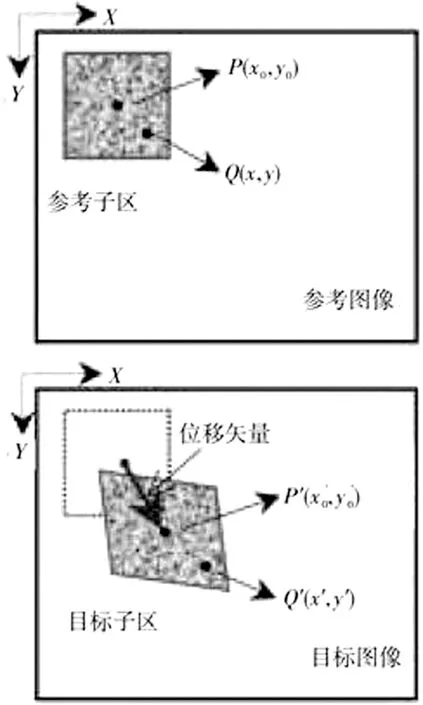
圖4 圖像分析技術示意圖
三、實驗方法和步驟
(1)先通過兩個攝像機拍攝標定板,可以拍攝大概數量的標定照片[3]。
(2)利用上面算法對立體視覺系統進行標定,并用非線性最小二乘法優化測量系統,確定攝像機的位置。
(3)通過攝像機對被測物體進行光學測量,并把圖像傳到控制電腦中進行分析,可以看到,布置好儀器即可進行三維坐標測量[4]。
四、誤差分析
首先對實驗中圖像相關技術測量誤差來源及控制進行介紹,其次根據在靜載和動載實驗中的應用分別進行分析,在靜載實驗部分根據不同材料力學性質和測量參數的側重點不同。
五、結論
本文通過對結構進行人工激勵,采用立體視覺測量結構,并對圖像進行灰度相關性分析和立體匹配,最后得到結構在人工激勵下,結構的空間三維坐標點,立體視覺抗干擾能力強,立體視覺測量只要攝像機以及控制電腦,在光線比較暗的環境下需要燈光,測量系統準備工作簡單,是一種可靠的精度高的結構測量技術。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中華詩詞(2019年7期)2019-11-25 01:43:04
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55