基于雙目立體視覺測量系統的無人機穩定性評測
2019-10-21 09:41:16
福建質量管理 2019年19期
(廣東工業大學土木與交通工程學院 廣東 廣州 510006)
一、基本原理
雙目立體視覺測量的基本原理就是使用兩個攝像機成一定角度對被測物進行三維測量[2],兩個有一定角度的相機拍攝到被測物體不同方向在不同攝像機中的圖像,這兩張圖像經過圖像處理,由于從不同角度拍攝,所以這兩張圖像會有視差,然后在結合標定出來的攝像機參數就可以得到被測物體的空間三維坐標[3]。
如圖1所示,空間點的P(xw,yw,zw),在兩臺圖像平面上的成像點。
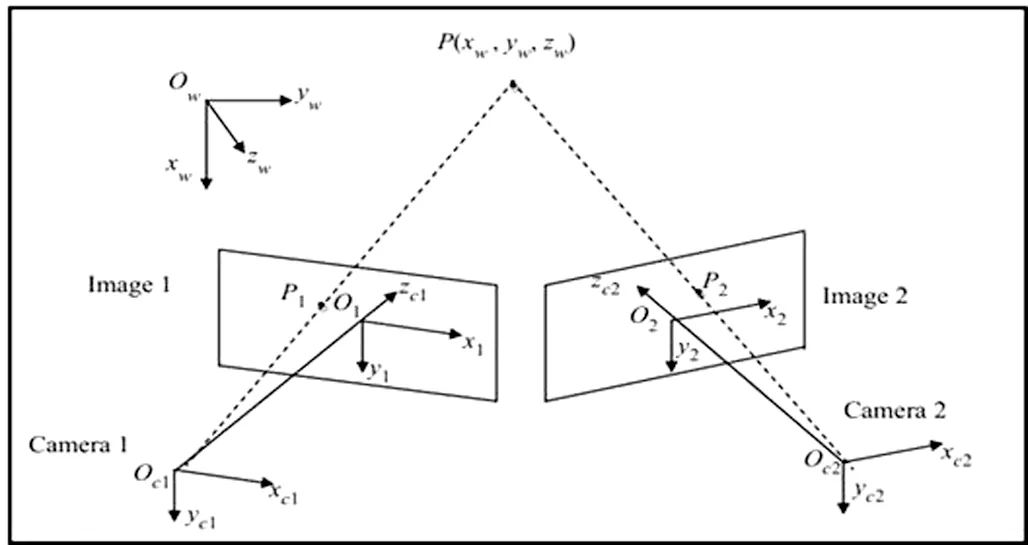
圖1 雙目立體視覺測量系統原理圖
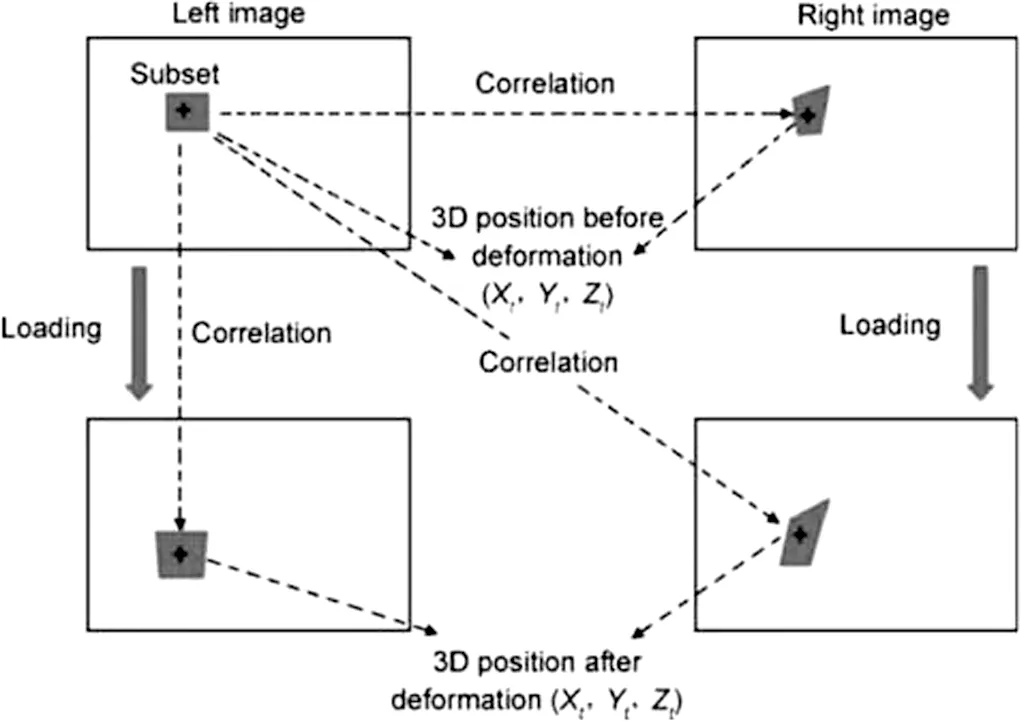
圖2 測量系統原理圖
二、實驗器材
(1)本次實驗采用的實驗器材是DJI-Spark無人機,這款無人機體積小,操控容易,避障功能強大并且結合了機器視覺和采用UltraSmooth機械云臺可以盡可能地減輕無人機懸停時的振動,而且拍攝的圖像采用1/2.3英寸CMOS鏡頭,有效像素可達到1200萬,滿足實驗要求。
(2)雙目立體視覺測量系統的相機采用兩臺FASTCAM SA3攝像機。

圖3 無人機照片
三、實驗布置和測量
本次實驗采用雙目立體視覺測量系統對正在進行結構振動測量的DJI-Spark無人機進行空間運動軌跡采集。
(1)首先進行試驗前準備工作,把高速攝像機的位置按照結構最優參數設計擺放,攝像機之間的距離、測量系統離無人機之間的距離還有攝像機之間的夾角都要調整好,若是實驗環境光線不充足,將補光燈放在合適的位置。
(2)在無人機的后面粘貼人工自制的散斑圖,以便雙目立體視覺測量系統能夠更加精確地檢測到無人機在懸停時的運動軌跡。
(3)通過攝像機測量系統可得到在無人機進行結構測量時的空間三維坐標。
四、結論
本文通過架設兩臺高速攝像機搭建的雙目立體視覺測量系統對DJI-Spark無人機進行穩定性分析,得到無人機在進行結構振動測量懸停時的無人機機身受各種因素的影響導致的運動軌跡本文使用雙目立體視覺測量系統能夠得到空間點的三維坐標,通過雙目立體視覺測量系統對無人機進行圖像采集和分析,得到無人機在進行測量時的空中運動軌跡,為無人機進行結構振動測量提供精度分析的依據。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
天天愛科學(2020年6期)2020-09-10 07:22:44
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學物理學報(2017年6期)2018-01-22 02:26:40
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55