超低頻柔性負(fù)載伺服控制系統(tǒng)的半物理試驗(yàn)方法
2019-10-21 06:17:50趙真馬超王碧
振動(dòng)工程學(xué)報(bào) 2019年4期
趙真 馬超 王碧

摘要: 以超低頻柔性負(fù)載伺服驅(qū)動(dòng)控制系統(tǒng)的地面試驗(yàn)方法為研究對象,設(shè)計(jì)半物理試驗(yàn)系統(tǒng),其中柔性負(fù)載為數(shù)學(xué)模型,驅(qū)動(dòng)裝置及其控制器為執(zhí)行機(jī)構(gòu),控制軟件為試驗(yàn)對象。具體以空間站對日跟蹤裝置的地面驅(qū)動(dòng)控制系統(tǒng)調(diào)試為需求牽引,設(shè)計(jì)半物理實(shí)時(shí)閉環(huán)加載試驗(yàn)系統(tǒng),推導(dǎo)大柔性太陽電池翼動(dòng)力學(xué)模型,依據(jù)實(shí)時(shí)采集的對日跟蹤裝置運(yùn)動(dòng)信息,作為動(dòng)力學(xué)模型輸入,實(shí)時(shí)輸出加載力矩值;控制閉環(huán)加載系統(tǒng)作用在對日跟蹤裝置輸出端,實(shí)現(xiàn)動(dòng)態(tài)反饋加載,并開展典型工況的驅(qū)動(dòng)控制性能測試。分析對日跟蹤裝置的運(yùn)行速度、太陽電池翼模態(tài)坐標(biāo)、動(dòng)態(tài)負(fù)載力矩、安裝面擾動(dòng)力矩等試驗(yàn)數(shù)據(jù),評估伺服系統(tǒng)控制性能,證明半物理試驗(yàn)方法在空間站太陽電池翼伺服驅(qū)動(dòng)控制系統(tǒng)設(shè)計(jì)中的有效性。該試驗(yàn)方法也可拓展應(yīng)用于大型微波天線、空間太陽能電站、太陽帆等空間柔性伺服系統(tǒng)的地面試驗(yàn)。
關(guān)鍵詞: 柔性結(jié)構(gòu); 伺服控制; 超低頻; 半物理試驗(yàn)
中圖分類號: V416.2; V448.2 文獻(xiàn)標(biāo)志碼: A 文章編號: 1004-4523(2019)04-0557-08
DOI:10.16385/j.cnki.issn.1004-4523.2019.04.001
1 概 述
中國載人航天已進(jìn)入空間站研制階段,有望在2022年前后全面建成。空間站運(yùn)行軌道高度340-450 km,傾角約41°,軌道周期約90 min。為保證空間站長期在軌運(yùn)行的能源需求,配置大型太陽電池翼用以提供足夠的太陽電池陣布片面積。并且使太陽電池翼法向矢量以0.065-0.3°/s角速度實(shí)現(xiàn)對日跟蹤指向[1]。
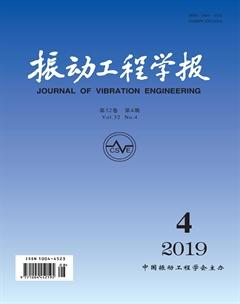
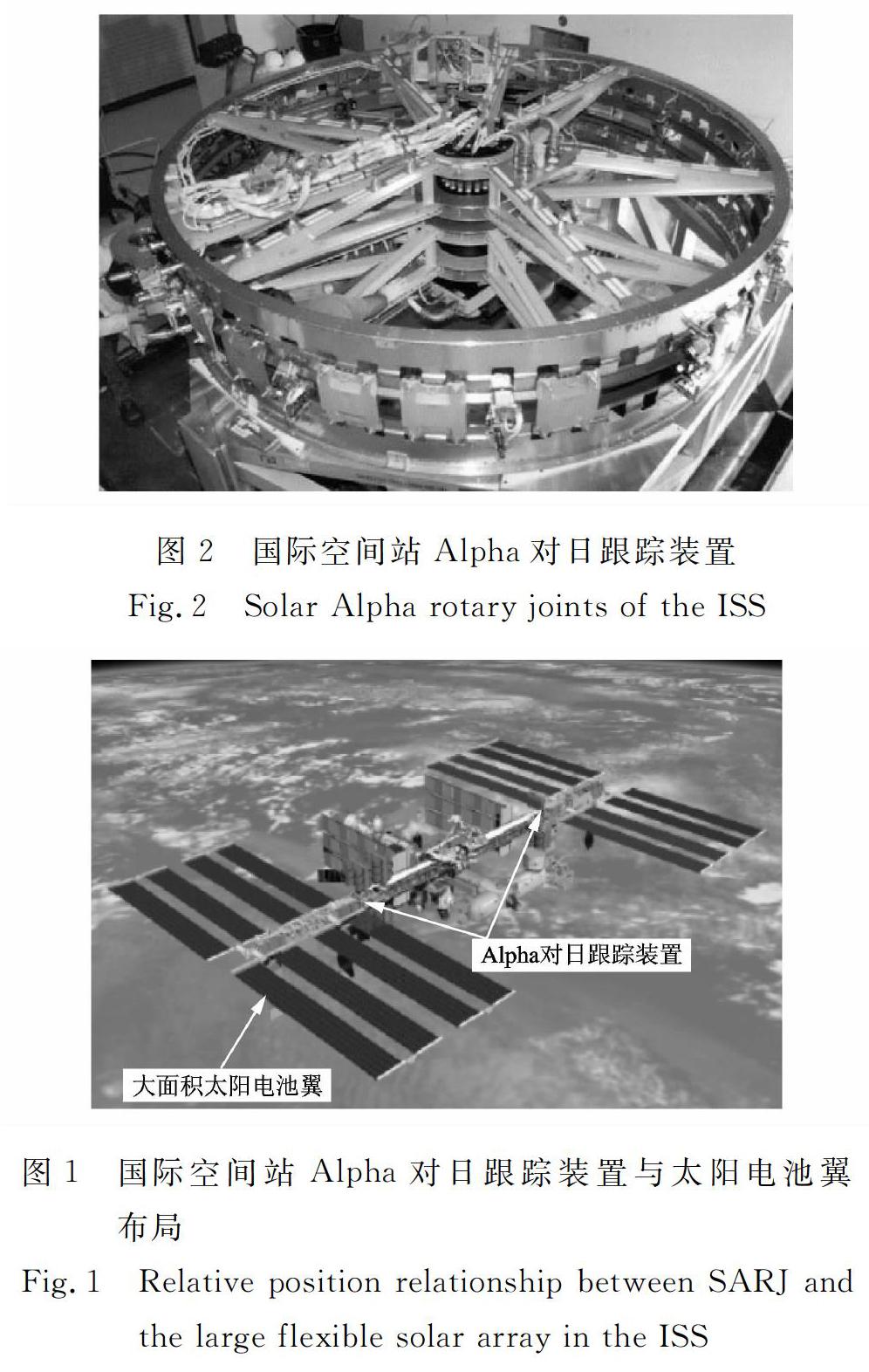
空間站對日跟蹤裝置(或稱太陽電池翼驅(qū)動(dòng)裝置Solar Array Drive Assembly,SADA)作為一個(gè)驅(qū)動(dòng)大柔性太陽電池翼實(shí)現(xiàn)高穩(wěn)定對日跟蹤的閉環(huán)伺服控制系統(tǒng),必須在合理模擬其柔性負(fù)載特性的前提下,考核機(jī)構(gòu)閉環(huán)伺服控制性能。空間站大柔性太陽電池翼具有大尺寸、大慣量、大柔性、模態(tài)密集等特點(diǎn),地面重力環(huán)境下測試較為困難[2-3]。以國際空間站(the International Space Station,ISS)為例,其Alpha對日跟蹤裝置(Solar Alpha Rotary Joints,SARJ)的8個(gè)大型太陽電池翼負(fù)載,翼展超過70 m,面積552 m2,一階頻率約0.06 Hz。轉(zhuǎn)動(dòng)慣量為5.4×105 kg·m2[4]。Alpha對日跟蹤裝置自重約1161 kg,結(jié)構(gòu)尺寸Φ3.2 m×1 m,啟動(dòng)力矩大于400 N·m,如圖1-2所示。
如此大尺寸柔性負(fù)載的驅(qū)動(dòng)控制系統(tǒng),給控制方案設(shè)計(jì)、性能調(diào)試、考核測試都帶來挑戰(zhàn)。同時(shí),對日跟蹤裝置自身傳動(dòng)環(huán)節(jié)復(fù)雜,摩擦、間隙、傳感器測量噪聲等非線性因素對驅(qū)動(dòng)控制性能的影響也不可忽略,也需要在試驗(yàn)系統(tǒng)中如實(shí)反映裝置傳動(dòng)性能。考慮到地面受重力和空氣阻力的影響,采用對日跟蹤裝置直接驅(qū)動(dòng)大柔性太陽電池翼的全物理試驗(yàn)較為困難[5]。國際空間站方案論證和技術(shù)攻關(guān)階段,為驗(yàn)證大柔性體伺服控制技術(shù)曾多次通過航天飛機(jī)搭載柔性太陽翼在軌實(shí)測,耗費(fèi)甚巨。因此,在哈勃望遠(yuǎn)鏡、日本工程試驗(yàn)衛(wèi)星ETS-VIII研制過程中,涉及大柔性負(fù)載伺服控制時(shí),都設(shè)計(jì)專門懸吊裝置開展動(dòng)力學(xué)參數(shù)辨識,之后對其驅(qū)動(dòng)控制性能只進(jìn)行數(shù)學(xué)仿真和在軌參數(shù)注入調(diào)試[6-7]。
本文以空間站對日跟蹤裝置地面驅(qū)動(dòng)控制系統(tǒng)調(diào)試為需求牽引,設(shè)計(jì)半物理實(shí)時(shí)閉環(huán)加載試驗(yàn)系統(tǒng),推導(dǎo)了大柔性太陽電池翼動(dòng)力學(xué)模型,依據(jù)實(shí)時(shí)采集的對日跟蹤裝置運(yùn)動(dòng)信息,作為動(dòng)力學(xué)模型輸入,實(shí)時(shí)輸出加載力矩值,控制閉環(huán)加載系統(tǒng)作用在對日跟蹤裝置輸出端,實(shí)現(xiàn)動(dòng)態(tài)反饋加載,并開展典型工況的驅(qū)動(dòng)控制性能測試,評估伺服控制系統(tǒng)的控制性能。
2 試驗(yàn)系統(tǒng)方案與指標(biāo)分析〖*3/4〗2.1 試驗(yàn)系統(tǒng)方案 ?考慮空間站太陽電池翼柔性負(fù)載尺寸較大(面積大于400 m2),模態(tài)密集(基頻不大于0.1 Hz),在地面重力環(huán)境下無法實(shí)現(xiàn)全物理驅(qū)動(dòng)性能測試,采用半物理方法考核對日跟蹤裝置控制性能。對日跟蹤裝置及其驅(qū)動(dòng)控制器為真實(shí)產(chǎn)品;柔性太陽電池翼負(fù)載采用數(shù)學(xué)模型計(jì)算,通過實(shí)時(shí)控制加載電機(jī)實(shí)現(xiàn)對日跟蹤裝置的負(fù)載扭矩模擬。試驗(yàn)中,通過調(diào)試和測試驅(qū)動(dòng)控制器中的閉環(huán)控制策略和參數(shù),達(dá)到對日跟蹤裝置控制性能。試驗(yàn)系統(tǒng)中可實(shí)時(shí)監(jiān)測對日跟蹤裝置驅(qū)動(dòng)電流、驅(qū)動(dòng)端和輸出端角度、角速度、速度穩(wěn)定度、驅(qū)動(dòng)力矩等數(shù)據(jù),也可通過實(shí)時(shí)計(jì)算得到太陽電池翼負(fù)載模態(tài)坐標(biāo)、特征點(diǎn)的振動(dòng)響應(yīng)等。
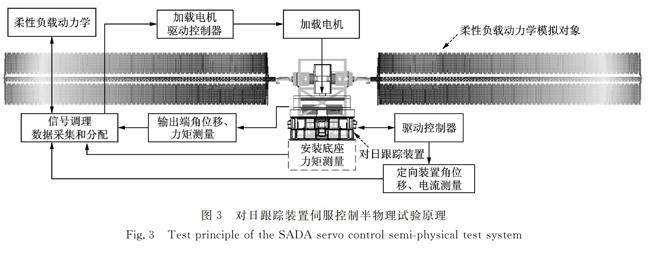
半物理試驗(yàn)系統(tǒng)原理如圖3所示。依據(jù)大柔性太陽電池翼動(dòng)力學(xué)模型,建立基于快速原型技術(shù)的柔性動(dòng)力學(xué)加載控制程序,編譯下載至試驗(yàn)系統(tǒng)下位機(jī)。試驗(yàn)時(shí),通過角度編碼器實(shí)時(shí)采集對日跟蹤裝置輸出端角度、角速度,提供給超低頻柔性太陽電池翼數(shù)學(xué)模型,計(jì)算出負(fù)載作用于對日跟蹤裝置的扭矩,并轉(zhuǎn)化為控制信號,控制試驗(yàn)系統(tǒng)加載電機(jī)實(shí)現(xiàn)實(shí)時(shí)加載。同時(shí),通過扭矩傳感器獲得實(shí)測加載扭矩值,形成扭矩閉環(huán)控制,確保精度。
通過半物理試驗(yàn)?zāi)軌蛟诘孛嬗行M超低頻太陽電池翼和對日跟蹤裝置在軌相互耦合動(dòng)態(tài)特性,獲得裝置啟動(dòng)、跟蹤、制動(dòng)過程中的驅(qū)動(dòng)控制性能。半物理試驗(yàn)系統(tǒng)由機(jī)械平臺、任務(wù)管理單元、動(dòng)力學(xué)仿真單元、加載單元、測控單元5部分組成,各單元關(guān)系圖4所示。
(1)機(jī)械平臺作為整個(gè)試驗(yàn)系統(tǒng)的機(jī)械框架,由龍門架、垂直升降臺、水平移動(dòng)滑臺組成;
(2)任務(wù)管理單元作為中央控制系統(tǒng),管理調(diào)度試驗(yàn)系統(tǒng)運(yùn)行,并監(jiān)測各項(xiàng)試驗(yàn)數(shù)據(jù);
(3)動(dòng)力學(xué)仿真單元包括柔性負(fù)載動(dòng)力學(xué)模型和實(shí)時(shí)計(jì)算機(jī),可根據(jù)對日跟蹤裝置的驅(qū)動(dòng)角速度實(shí)時(shí)計(jì)算出太陽電池翼的反作用力矩和模態(tài)坐標(biāo);
(4)加載單元包括低速永磁同步電機(jī)及其控制器,以及實(shí)現(xiàn)高精度力矩閉環(huán)加載反饋的扭矩傳感器a,以動(dòng)力學(xué)仿真單元計(jì)算的力矩為控制指令;
(5)測控單元包括測控計(jì)算機(jī)和各類測量傳感器,如角度編碼器可用于評估對日跟蹤裝置輸出平穩(wěn)性,扭矩傳感器b可用于分析對日跟蹤裝置安裝面對空間站艙體的擾動(dòng)力矩,如圖5所示。
為確保半物理試驗(yàn)結(jié)果的有效性,有兩個(gè)關(guān)鍵環(huán)節(jié):(1)柔性負(fù)載動(dòng)力學(xué)模型正確性,確保給加載電機(jī)的指令準(zhǔn)確, 具體可參見文獻(xiàn)[8];(2)試驗(yàn)系統(tǒng)的實(shí)時(shí)性、加載帶寬、加載精度等都應(yīng)滿足柔性負(fù)載對象加載模擬的要求。
試驗(yàn)系統(tǒng)的控制周期為2 ms,閉環(huán)加載控制帶寬不小于10 Hz,遠(yuǎn)高于被模擬對象——柔性太陽電池翼的基頻不大于0.1 Hz。靜態(tài)加載能力不小于200 N·m,動(dòng)態(tài)加載精度優(yōu)于1 N·m@100 N·m。加載能力由實(shí)際加載需求確定。
其中,對加載精度的標(biāo)定分別采用靜態(tài)和動(dòng)態(tài)兩種加載方式,如圖6所示。通過對頻率為10 Hz,幅值100 N·m的正弦加載指令的動(dòng)態(tài)跟蹤能力進(jìn)行精度考核,具體可參見文獻(xiàn)[9]。
3 太陽電池翼動(dòng)力學(xué)建模〖*2〗3.1 柔性動(dòng)力學(xué)狀態(tài)方程 ?對日跟蹤裝置伺服控制半物理試驗(yàn)系統(tǒng),需要建立高效超低頻太陽電池翼的柔性動(dòng)力學(xué)模型。在試驗(yàn)系統(tǒng)運(yùn)行過程中,根據(jù)實(shí)時(shí)測量得到的對日跟蹤裝置輸出角度、角速度數(shù)據(jù),計(jì)算出太陽電池翼施加在對日跟蹤裝置輸出端面上的反作用扭矩,并控制加載電機(jī)實(shí)現(xiàn)力矩控制。
空間站太陽電池翼作為大型柔性結(jié)構(gòu),具有頻率低、模態(tài)密集、結(jié)構(gòu)阻尼小、各向彈性耦合等特點(diǎn)。參考中國空間站對日跟蹤裝置和太陽電池翼的相對布局關(guān)系,如圖7所示,建立太陽電池翼動(dòng)力學(xué)模型。采用混合坐標(biāo)法和有限元法對模型離散化,依據(jù)Lagrange方程建立柔性動(dòng)力學(xué)模型,得到太陽電池翼驅(qū)動(dòng)力矩與轉(zhuǎn)速的狀態(tài)方程[10-11]。
太陽電池翼坐標(biāo)系定義如圖8所示,坐標(biāo)系{b}為慣性系。坐標(biāo)系{f}為太陽電池翼隨動(dòng)坐標(biāo)系,原點(diǎn)在太陽電池翼與對日跟蹤裝置連接法蘭面幾何中心。其中,rb為{b}原點(diǎn)Ob到{f}原點(diǎn)Of的矢量,rfi為太陽電池翼離散后的節(jié)點(diǎn)i在{f}系下的矢量,δfi為節(jié)點(diǎn)i的變形量。太陽電池翼繞yf轉(zhuǎn)動(dòng),角速度設(shè)為ωf。
太陽電池翼柔性動(dòng)力學(xué)狀態(tài)方程是一個(gè)多輸入多輸出方程,可得以下結(jié)論:
1)系數(shù)矩陣Ff的非對角線元素不為0,說明柔性體動(dòng)力學(xué)特性在不同方向和頻率間存在耦合作用。即對日跟蹤裝置施加在柔性太陽電池翼扭轉(zhuǎn)方向的驅(qū)動(dòng)力矩,會(huì)激發(fā)除扭轉(zhuǎn)以外,其他方向的彎曲變形;當(dāng)太陽電池翼在軌受到非扭轉(zhuǎn)方向的擾動(dòng)載荷時(shí)(如空間站軌道姿態(tài)調(diào)整、航天員出艙活動(dòng)、機(jī)械臂在軌組裝、空間對接等),激發(fā)太陽電池翼彈性振動(dòng),也會(huì)導(dǎo)致對日跟蹤裝置承受驅(qū)動(dòng)方向的作用力矩。所以,在半物理試驗(yàn)系統(tǒng)數(shù)學(xué)模型中,需要保留太陽電池翼多個(gè)方向的模態(tài)信息;
2)對日跟蹤裝置的非扭轉(zhuǎn)驅(qū)動(dòng)方向載荷將由裝置的殼體承受,通過安裝法蘭面?zhèn)鬟f給空間站艙體。因此,半物理試驗(yàn)系統(tǒng)只需模擬扭轉(zhuǎn)負(fù)載力矩,用于調(diào)試和測試對日跟蹤裝置的控制性能。從而可大幅度簡化試驗(yàn)系統(tǒng)的研制難度;
3)為模擬艙體擾動(dòng)載荷對柔性太陽電池翼的激勵(lì),可在柔性太陽電池翼的數(shù)學(xué)模型輸入端疊加其他擾動(dòng)引起的斷面加速度響應(yīng)。
3.2 太陽電池翼模態(tài)分析與截?cái)?/p>
柔性動(dòng)力學(xué)狀態(tài)方程如公式(9)所示,為得到各方程系數(shù),對太陽電池翼進(jìn)行模態(tài)分析,獲取各階頻率和振型。但對于如空間站太陽電池翼尺寸大、基頻低、模態(tài)密集的結(jié)構(gòu),直接采用模態(tài)截?cái)嗳匀粫?huì)導(dǎo)致運(yùn)算規(guī)模較大。因此,先根據(jù)伺服控制帶寬進(jìn)行初次截?cái)啵僖罁?jù)慣性完備性準(zhǔn)則和模態(tài)有效質(zhì)量進(jìn)行模態(tài)篩選[12-13]。
參考國際空間站大柔性太陽電池翼設(shè)計(jì)參數(shù),建立有限元模型,如圖9所示。設(shè)轉(zhuǎn)軸正方向yf,原點(diǎn)在太陽電池翼與對日跟蹤裝置連接法蘭面幾何中心。
對不同截止頻率下的模態(tài)階數(shù)和模態(tài)有效質(zhì)量進(jìn)行匯總,如表1所示。
太陽電池翼彈性勢能主要體現(xiàn)在zf軸平動(dòng)和繞yf軸轉(zhuǎn)動(dòng)。模態(tài)截止頻率截?cái)嘀? Hz,其RZ向模態(tài)有效質(zhì)量大于99%,對于基頻0.035 Hz的柔性負(fù)載,伺服控制帶寬不大于0.2 Hz,保留2 Hz內(nèi)動(dòng)態(tài)特性,可為工程接受。再對2 Hz內(nèi)模態(tài),根據(jù)模態(tài)有效質(zhì)量可進(jìn)行進(jìn)一步完備性篩選,簡化狀態(tài)方程規(guī)模[13-14]。
4 試驗(yàn)工況與結(jié)果
對日跟蹤裝置采用矢量變換控制的永磁同步電機(jī),經(jīng)過多級減速,驅(qū)動(dòng)柔性太陽電池翼。并分別在電機(jī)端和輸出端布置旋轉(zhuǎn)變壓器實(shí)現(xiàn)角度測量反饋。為提高對大柔性太陽電池翼的驅(qū)動(dòng)平穩(wěn)性,消除多級傳動(dòng)引起的傳動(dòng)間隙和傳動(dòng)摩擦,對日跟蹤裝置的控制算法采用帶運(yùn)動(dòng)規(guī)劃和振動(dòng)抑制的三閉環(huán)(電流、速度、位移)伺服控制[15-16]。
將前文推導(dǎo)的柔性太陽電池翼動(dòng)力學(xué)模型轉(zhuǎn)換為實(shí)時(shí)運(yùn)行的控制程序,編譯下載到試驗(yàn)系統(tǒng)控制器中。模型運(yùn)行周期為2 ms。模型輸入為對日跟蹤裝置輸出端角度編碼器測量值,模型輸出為對日跟蹤裝置所受負(fù)載力矩。試驗(yàn)狀態(tài)如圖13所示。
試驗(yàn)工況為對日跟蹤裝置從靜止?fàn)顟B(tài)啟動(dòng)至0.3 °/s之后減速至停轉(zhuǎn),兩段變速過程各用時(shí)180 s,為Heaviside階躍五次樣條變速規(guī)劃。
實(shí)時(shí)采集對日跟蹤裝置的角速度、角度、負(fù)載力矩、太陽電池翼模態(tài)坐標(biāo)、安裝基座反作用力矩等,以評估對日跟蹤裝置的低速控制性能。
從角速度和角位移曲線圖14-15可知,通過運(yùn)動(dòng)規(guī)劃,對日跟蹤裝置的變速過程平穩(wěn),對指令速度的跟蹤精度較高。
柔性太陽電池翼的負(fù)載力矩如圖16所示,實(shí)線為加載電機(jī)指令力矩,點(diǎn)劃線為實(shí)際輸出力矩,試驗(yàn)系統(tǒng)實(shí)測力矩控制精度優(yōu)于0.2 N·m,滿足動(dòng)態(tài)加載精度優(yōu)于1 N·m@100 N·m指標(biāo)。
從柔性太陽電池翼的負(fù)載力矩圖16和安裝基座的反作用力矩圖17,以及太陽電池翼模態(tài)坐標(biāo)圖18可知,在啟動(dòng)過程中最大的力矩不大于40 N·m,且進(jìn)入平穩(wěn)運(yùn)行階段后驅(qū)動(dòng)力矩小于10 N·m,說明對日跟蹤裝置的驅(qū)動(dòng)速度穩(wěn)定度較高(優(yōu)于10%),進(jìn)入減速制動(dòng)后,負(fù)載力矩又會(huì)有所增加,并將激發(fā)太陽電池翼扭轉(zhuǎn)模態(tài),停轉(zhuǎn)后逐步穩(wěn)定。
本文以空間站對日跟蹤裝置驅(qū)動(dòng)控制系統(tǒng)調(diào)試為需求牽引,設(shè)計(jì)半物理試驗(yàn)系統(tǒng)。推導(dǎo)了大柔性太陽電池翼動(dòng)力學(xué)模型,依據(jù)實(shí)時(shí)采集的對日跟蹤裝置角度和角速度,作為動(dòng)力學(xué)模型輸入,輸出實(shí)時(shí)加載力矩,控制閉環(huán)加載系統(tǒng)作用在對日跟蹤裝置輸出端,實(shí)現(xiàn)動(dòng)態(tài)反饋加載,并開展典型工況的驅(qū)動(dòng)控制性能測試。通過分析判讀對日跟蹤裝置的運(yùn)行速度、太陽電池翼模態(tài)坐標(biāo)、動(dòng)態(tài)負(fù)載力矩、安裝面擾動(dòng)力矩等試驗(yàn)數(shù)據(jù),評估伺服系統(tǒng)控制性能,證明半物理試驗(yàn)方法在空間站對日跟蹤裝置伺服控制系統(tǒng)測試中的有效性。
該試驗(yàn)方法也可拓展應(yīng)用于大型微波天線、空間太陽能電站、太陽帆等空間柔性伺服系統(tǒng)的地面試驗(yàn)。
參考文獻(xiàn):
[1] 王忠貴.載人航天飛行控制理論與實(shí)踐[M].北京:國防工業(yè)出版社,2015:285-294.
[2] Hyoung M Kim, Mohamed Kaouk. Flight test, modal analysis, and model refinement of the mir space station[J]. AIAA JOURNAL, 2002,40(8):1589-1595.
[3] Renjith R Kumar, Paul A Cooper, Tae W Lim. Sensitivity of space station Alpha joint robust controller to structural modal parameter variations[J]. Journal of Guidance, Control, and Dynamics, 1992,15(6):1427-1433.
[4] Tae W Lim, Paul A Cooper, J Kirk Ayers. Structural dynamic interaction with solar tracking control for evolutionary space station concepts[R]. NASA Technical Memorandum 107629, Hampton: Langley Research Center,1992.
[5] 林竹翀.航天器太陽帆板對日定向方法研究[D]. 長沙: 國防科學(xué)技術(shù)大學(xué), 2010.
Lin Zhuchong. Study on spacecraft solar panel sun-tracking method[D]. Changsha: National University of Defense Technology, 2010.
[6] Bong Wie, Qiang Liu, Frank Bauer. Classical and robust H∞ control redesign for the Hubble space telescope[J]. Journal of Guidance, Control, and Dynamics, 1993,16(6):1069-1077.
[7] Yoshiro Hamada, Takashi Ohtani, Takashi Kida, et al. Synthesis of a linearly interpolated gain scheduling controller for large flexible spacecraft ETS-VIII[J]. Control Engineering Practice, 2011,19(2011):611-625.
[8] 趙 真,肖余之,杜三虎,等. 太陽電池陣大范圍運(yùn)動(dòng)反作用力矩求解方法研究[J]. 振動(dòng)與沖擊,2010,29(7):116-120.
Zhao Zhen, Xiao Yu-zhi, Du San-hu, et al. Reaction account of flexible solar cell array in large overall motions[J]. Journal of Vibration and Shock, 2010,29(7):116-120.
[9] 賀 云,尹 猛,徐志剛,等. 對日跟蹤半物理試驗(yàn)臺的加載有效性驗(yàn)證[J]. 宇航學(xué)報(bào), 2017,38(2):198-204.
He Yun, Yin Meng, Xu Zhigang, et al. Effectiveness validation of the semi-physical test bench for the Sun orientation[J]. Journal of Astronautics, 2017,38(2):198-204.
[10] 洪嘉振,尤超藍(lán).剛?cè)狁詈舷到y(tǒng)動(dòng)力學(xué)研究進(jìn)展[J]. 動(dòng)力學(xué)與控制學(xué)報(bào), 2004,2(2):1-6.
Hong Jia-zheng, You Chao-lan. Advances in dynamics of rigid-flexible coupling system[J]. Journal of Dynamics and Control, 2004,2(2):1-6.
[11] Yung J Lee, Murugan Subramaniam, Ravi Venugopal, et al. Integrated system tool for flexible multibody dynamics and control system analysis[C]. Guidance, Navigation, and Control Conference and Exhibit, 1999:1437-1447.
[12] 屠善澄.衛(wèi)星姿態(tài)動(dòng)力學(xué)與控制[M].北京:中國宇航出版社,2009:172-183.
[13] 周志成,曲廣吉. 通信衛(wèi)星總體設(shè)計(jì)和動(dòng)力學(xué)分析[M]. 北京:中國科學(xué)技術(shù)出版社,2013:329-337.
[14] 白圣建. 撓性航天器的建模與控制方法研究[D]. 長沙: 國防科學(xué)技術(shù)大學(xué), 2005.
Bai Sheng-jian. Research on modeling and control of flexible spacecraft[D]. Changsha: National University of Defense Technology, 2005.
[15] 陳 榮. 永磁同步電機(jī)伺服系統(tǒng)研究[D]. 南京:南京航空航天大學(xué),2004.
Chen Rong. Research on permanent magnet synchronous motor servo system[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2004.
[16] 宋 彥. 伺服系統(tǒng)提高速度平穩(wěn)度的關(guān)鍵技術(shù)研究與實(shí)現(xiàn)[D]. 長春:中國科學(xué)院長春光學(xué)精密機(jī)械與物理研究所,2010.
Song Yan. Study and realization on key technology for improve velocity stability[D]. Changchun: Changchun Institute of Optics Fine Mechanics and Physics Chinese Academy of Sciences, 2010.
Abstract: To study the ground test method of ultra-low frequency flexible load servo drive control system, a semi-physical test system is designed. The test system includes a flexible dynamics model, drive controller and control software. Based on the requirement of the control system of day tracking device by China Space Station (CSS), the semi-physical real-time closed-loop loading test system is designed and the dynamic model of the flexible wing solar cell is deduced. According to the collected tracking information of the tracking device, the load torque value is calculated in real time, and the actuator is controlled to achieve dynamic feedback. The experimental data of the running speed, solar cell wing modal coordinates, dynamic load moment and mounting disturbance torque are analyzed to evaluate the control performance of the servo control system. It is proved that the semi-physical test method is effectively applied in the space station solar cell wing servo drive control system ground test. The test method can also be extended to the ground test of space flexible servo system applied to large microwave antenna, space solar power station, solar sail and so on.
Key words: flexible body; servo control; ultra-low frequency; semi-physical test
作者簡介: 趙 真(1983-),男,博士研究生,高級工程師。 電話:(021)24186239; E-mail: zhaozhen101@163.com
通訊作者: 陳國平(1956-),男,博士,教授。 電話:(025)84892142; E-mail: gpchen@nuaa.edu.cn