基于信息融合的機(jī)器人環(huán)境建模
2019-10-21 08:00:32黃尚鋒
天工 2019年6期
黃尚鋒
[摘 要]機(jī)器人工作環(huán)境對(duì)機(jī)器人的準(zhǔn)確移動(dòng)有著十分重要的意義。機(jī)器人的環(huán)境建模對(duì)實(shí)現(xiàn)機(jī)器人自主性起到基礎(chǔ)性作用。
[關(guān)鍵詞]環(huán)境建模;機(jī)器人;工作環(huán)境
一、環(huán)境建模的分類(lèi)
機(jī)器人的工作環(huán)境錯(cuò)綜復(fù)雜,因此構(gòu)建機(jī)器人工作環(huán)境十分必要。當(dāng)今在環(huán)境建模領(lǐng)域,已經(jīng)誕生出多種理論方法來(lái)探究周邊工作環(huán)境。Bücken等人創(chuàng)造出柵格地圖法、拓?fù)鋱D法、利用外界傳感器反饋的信息表示環(huán)境等方法。
二、多傳感器環(huán)境建模
現(xiàn)代多數(shù)機(jī)器人利用傳感器來(lái)采集周邊信息,通過(guò)二維矩陣存儲(chǔ)數(shù)據(jù),經(jīng)過(guò)計(jì)算比較呈現(xiàn)出相應(yīng)的概率值,提供可參考的可信度。若機(jī)器人周邊環(huán)境比較嘈雜,傳感器采集信號(hào)干擾性強(qiáng),則會(huì)產(chǎn)生較低的概率,可信度較低。利用二維柵格陣法就可以消除外界干擾,獲得較好的可信度。圖1為傳感器探測(cè)圖。
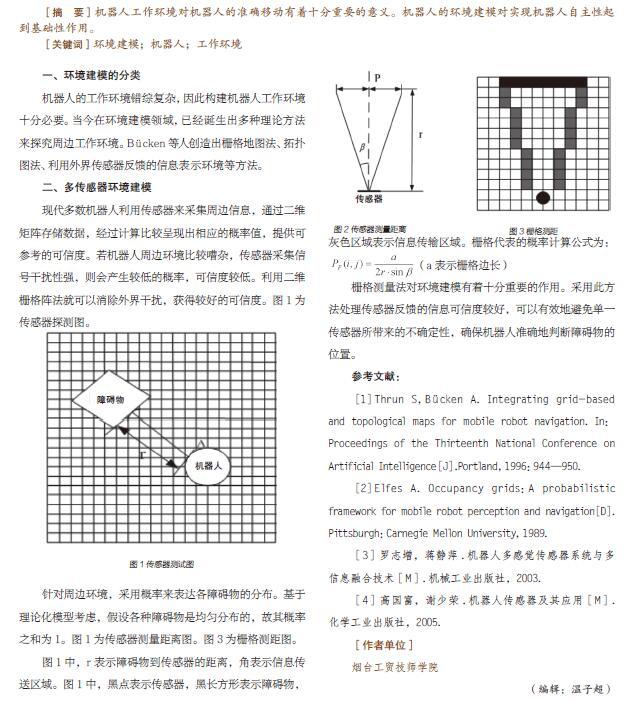
針對(duì)周邊環(huán)境,采用概率來(lái)表達(dá)各障礙物的分布。基于理論化模型考慮,假設(shè)各種障礙物是均勻分布的,故其概率之和為1。圖1為傳感器測(cè)量距離圖。圖3為柵格測(cè)距圖。
圖1中,r表示障礙物到傳感器的距離,角表示信息傳送區(qū)域。圖1中,黑點(diǎn)表示傳感器,黑長(zhǎng)方形表示障礙物,灰色區(qū)域表示信息傳輸區(qū)域。柵格代表的概率計(jì)算公式為:(a表示柵格邊長(zhǎng))
柵格測(cè)量法對(duì)環(huán)境建模有著十分重要的作用。采用此方法處理傳感器反饋的信息可信度較好,可以有效地避免單一傳感器所帶來(lái)的不確定性,確保機(jī)器人準(zhǔn)確地判斷障礙物的位置。
參考文獻(xiàn):
[1]Thrun S,Bücken A. Integrating grid-based and topological maps for mobile robot navigation. In:Proceedings of the Thirteenth National Conference on Artificial Intelligence[J].Portland,1996:944—950.
[2]Elfes A. Occupancy grids:A probabilistic framework for mobile robot perception and navigation[D]. Pittsburgh:Carnegie Mellon University,1989.
[3]羅志增,蔣靜萍.機(jī)器人多感覺(jué)傳感器系統(tǒng)與多信息融合技術(shù)[M].機(jī)械工業(yè)出版社,2003.
[4]高國(guó)富,謝少榮.機(jī)器人傳感器及其應(yīng)用[M]. 化學(xué)工業(yè)出版社,2005.
[作者單位]
煙臺(tái)工貿(mào)技師學(xué)院
(編輯:溫子超)