棒料沖剪機的運動特性分析
2019-10-21 19:21:53譚曉霞
裝備維修技術 2019年5期
譚曉霞
摘要: 平面十桿曲柄滑塊機構具有對稱性機構特點,本論文設計了平面十桿曲柄滑塊機構中的一個實例––棒料沖剪機,在給定結構設計參數的情況下,推導出運動表達式,繪制運動曲線,分析棒料沖剪機的運動特性。
關鍵詞: 棒料沖剪機;平面十桿曲柄滑塊機構;運動特性
引言
曲柄壓力機的工作機構是曲柄連桿,是通過傳動系統將電動機的運動和能量傳遞給曲軸,使曲軸作旋轉運動,并通過連桿使滑塊產生往復運動。由于機器的導軌與滑塊之間存在有間隙,滑塊并不會沿其整個導軌長度進行接觸工作,而是有一端呈傾斜狀態局部接觸,造成導軌與滑塊上的主動力之間存在一個夾角,而且會隨滑塊位移而變化的,所以會出現局部接觸區上發熱、產生很大的接觸應力和摩擦力,以致引起導軌面嚴重磨損,影響滑塊的位置精度要求。如果要增加導軌與滑塊之間的接觸面積,采取在滑塊的上、下端部增加彈性邊緣,能夠減小磨損,降低接觸應力和摩擦力,但橫向作用力依然會存在著,而且該力還會引起曲柄壓力機的橫向振動。因此本論文提出了棒料沖剪機,是一種平面十桿曲柄滑塊機構,結構具有對稱性,當工作阻力作用于滑塊的幾何中心線上時,滑塊與導軌之間沒有作用力,從而減輕了導軌的磨損、消除了機架的橫向振動,確保了滑塊獲得長時間的位置精度。棒料沖剪機的設計是根據平面十桿機構的結構特點和運動特性來展開的,設計和制造都較簡單,根據設計的參數推導出運動表達式,并計算出相應的運動分析結果,棒料沖剪機設計實例表明了該種機構用作為機械壓力機工作機構的優越性。
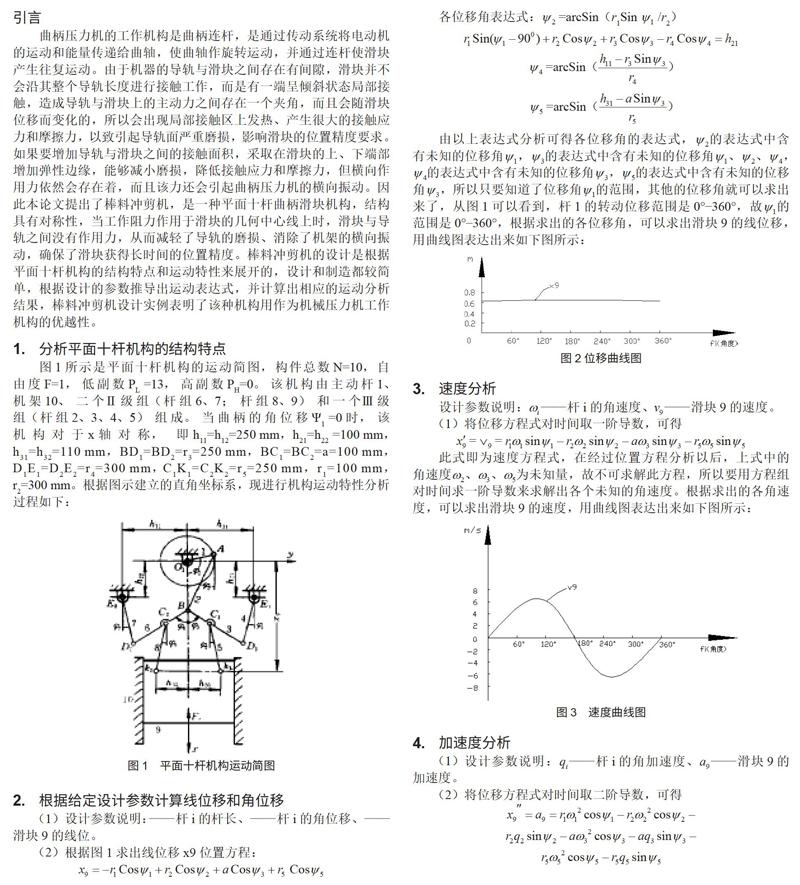
分析平面十桿機構的結構特點
圖1所示是平面十桿機構的運動簡圖,構件總數N=10,自由度F=1,低副數PL =13,高副數PH=0。該機構由主動桿1、機架10、二個Ⅱ級組(桿組6、7;桿組8、9)和一個Ⅲ級組(桿組2、3、4、5)組成。當曲柄的角位移Ψ1 =0時,該機構對于x軸對稱,即h11=h12=250mm,h21=h22 =100mm,h31=h32=110mm,BD1=BD2=r3=250mm,BC1=BC2=a=100mm,D1E1=D2E2=r4=300mm, C1K1=C2K2=r5=250mm,r1=100mm,r2=300mm。根據圖示建立的直角坐標系,現進行機構運動特性分析過程如下:
由以上表達式分析可得各位移角的表達式,的表達式中含有未知的位移角,的表達式中含有未知的位移角、、,的表達式中含有未知的位移角,的表達式中含有未知的位移角,所以只要知道了位移角的范圍,其他的位移角就可以求出來了,從圖1可以看到,桿1的轉動位移范圍是0°–360°,故的范圍是0°–360°,根據求出的各位移角,可以求出滑塊9的線位移,用曲線圖表達出來如下圖所示:
此式即為速度方程式,在經過位置方程分析以后,上式中的角速度、、為未知量,故不可求解此方程,所以要用方程組對時間求一階導數來求解出各個未知的角速度。根據求出的各角速度,可以求出滑塊9的速度,用曲線圖表達出來如下圖所示:
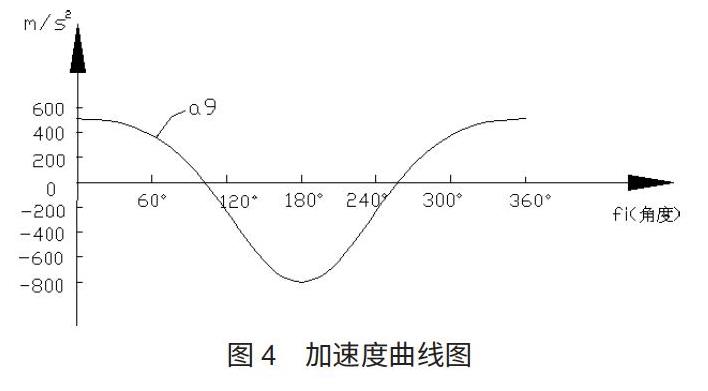
此式即為加速度方程式,在經過速度方程式分析以后,上式中的角速度、、為未知量,故不可求解此方程,所以要用方程組對時間求一階導數來求解出各個未知的角加速度。根據求出的各角加速度,可以求出滑塊9的加速度,用曲線圖表達出來如下圖所示:
結論
本設計通過分析平面十桿曲柄滑塊機構對稱性的結構特點,根據給出的參數來推導出棒料沖剪機的有關表達式,用CAD軟件繪制運動曲線圖,根據直觀的運動線圖,它可以查得任一瞬時機構的運動參數,并可以清楚地看出機構的運動變化情況,這使得分析過程清晰明了,更容易理解棒料沖剪機的工作原理。
參考文獻
楊群,機構壓力機的基礎知識[M].北京:電子工業出版社,1990.
李作有等譯,曲柄壓力機譯文集[A].北京:機械工業出版社,1990.
王洪欣,聶如春,彎家立,等.一個平面十桿曲柄滑塊機構傳動的研究[J],機械設計,1998.
