工業機器人視覺系統的可靠定位分析
2019-10-21 19:21:53馬佳譽
裝備維修技術 2019年5期
馬佳譽

摘要: 科技發展推動了時代的變遷,機器人被大量生產出來,同時機器人的出現也在相當大的程度上解放了很多領域的部分工作環節,相比較人工,機器人能夠完成的工作效率更高。但是機器人也存在自身的弊端那就是接受周圍信號的感官是不存在的不能根據外界信息的變化來調整自己的工作狀態和環節,使得在某些環節中,由工業機器人負責的工業生產質量和精度還得不到保障。所以將視覺系統安裝到工業機器人內部,提高機器人對外界信息的感知能力和視覺能力,進而提高機器人的實用性、靈活性是很有必要的。本文介紹了計算機視覺系統對機器人的意義、系統的構成和運作的原理。通過將計算機視覺系統安裝在工業機器人內部,從而實現機器人的對物體的定位功能,繼而能夠完成識別、跟蹤、搬運等一系列功能。
關鍵詞: 工業機器人;視覺系統;定位
引言
計算機視覺系統的設計和研發是為了更好地為工業機器人服務,它的本質是發揮攝像機定位以及跟蹤性功能,很多企業在自身生產環節依賴于機器人,生產效率明顯得到改善。然而很多機器人的工作模式是半自動的,需要在人工操控的指引下才能完成工作任務,這使得機器人的實用性和適應性較差,無法徹底解放人工,實現自動化操作。為了提高機器人接收外界信息、感知外界信息的能力,進一步提高機器人的工作效率,保障工業生產的精度和質量,在以往的機器人系統中新增全新的計算機視覺系統,通過視覺系統捕捉的外界信息,對圖像進行分析識別,繼而讓機器人能夠識別外界信息,然后再全面分析圖像的基礎上完成后續的重建和精準化計算,通過一系列的重建以及精準化的計算全面應用機器人控制柜通訊等等設備,完成全面的掌控工作。實現機器人對外界信息的跟蹤功能和定位功能。
系統的結構與原理
本文選取的研究對象是Motornan UP6工業機器人系統,在以往的系統內,再將計算機視覺系統嵌入到工業機器人內部,從而提高機器人識別外界信息的能力。此套視覺系統的組成部分包括了工控機、OK c一50圖像采集卡等外部設備。工學機器人的全系統包含了以往存在的原有系統以及新增的計算機視覺系統。圖像采集系統能夠采集外界物體的信息圖像,接著會分三步對采集的圖像進行處理、計算、變換和通信,繼而來給工控機下達指令,操縱工業機器人。
計算機視覺系統的構建
硬件的組成
如圖1。CCD攝像頭的像素用p表示,其具體參數如下:500(H)x582(V),N:510(H)x 492(v)。攝像機的成像器使用1‘33“CCD信噪>48dB,此外,CCD攝像頭的優點眾多,在背景陰暗時,它會對背景進行自動補光,且具備自動增益控制功能。
圖像采集卡:采集卡的構成部件有CCD攝像頭以及與攝像頭配套使用的MV 200工業圖像處理。MV一200圖像采集卡的優點是采集的圖像高清,分辨率好。其部件展示如下圖2:
MV一200圖像采集卡的穩定性是非常不錯的,其采集的圖像不僅像素高,質量好,畫面效果也是非常順暢,完全不卡頓。該卡的硬件質量也有所保障、地層函數也較為穩定,即使在不友好的工作環境中,它依舊能夠穩定運行。
MV一200圖像采集卡性能特點:該卡的分辨率是768 x 576,采用新型的視頻過濾技術,進而保障了采集圖像的質量,其顯示效果也是十分流暢。它支持的系統有Win98 / 2K / XP等多種系統,被廣泛應用于人工智能領域、監控領域、事物定位識別領域。
工控機:工控機一般選擇奔4系列。
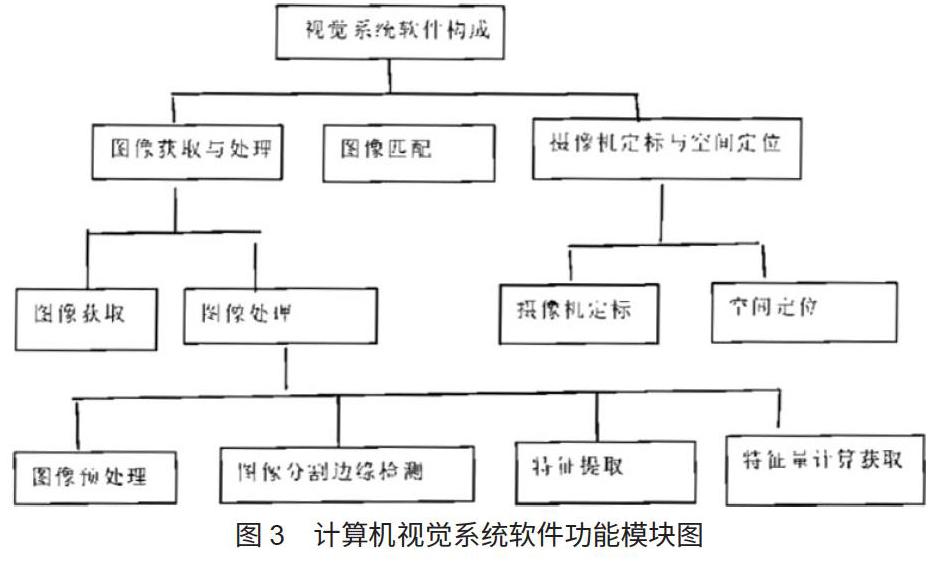
軟件的組成
對于圖像信息完成詳細的分配,例如圖像處理軟件,圖像獲取軟件,定位軟件,算法軟件等等都是其中重要組成。
視覺系統的原理及流程圖
工業機器人的核心系統構成有三個部分,第一部分為工業機器人本體;第二部分是機器人外部的硬件設備,這些硬件設備包括外部設備、控制器、執行器等核心元件;第三部分就是計算機視覺系統,該系統完成的任務有圖像的采集、圖像的處理和計算、圖像的分析和定位。通過Opencv的視覺庫進行VC++.NET實行,流程如下圖表4所示:
本文的計算機視覺系統在進行工作時,第一步要借由攝像機進行定標,建立坐標系統,定位攝像機的位置和攝像機對應點的位置。在定位流程展開之時,首先要標記基準點,基準點一旦確定,攝像機在進行圖像采集的時候,就能夠精準地在攝像機的坐標上標注這些基準點的位置。此外,就能夠處理并計算采集卡的圖像,具體得出基準點圖像在坐標系中的位置坐標,最好使用定標計算法,計算出攝像機的參數。
計算機視覺系統運完成圖片,數據,視頻等等靈活改變,將這些信息統一起來,存儲的格式選擇BN格式,計算機發揮C語言的功能,完成圖像調節,進而對函數有效控制,
讓這些圖像信息在計算機上顯露出來,緊接著去除圖像內含有的噪聲和其他干擾,對圖像進行平滑處理,針對灰度閾值的圖像,使用二值化對其進行處理。當完成這些工作以后,接著就要找到與圖片相符的具體特質,通過高度一致化的匹配完成圖像的采集,如果重疊度比較理想,那么就稱之為有效圖像,如果重疊效率不高,那么則需要發揮3D數據庫的功能,完成后期模型的優化選擇,完成詳細的分析計算工作。
直至確定和圖像互相匹配的數據模型為止。整個操作流程如下圖5所示。
結語
概括來說,計算機視覺系統是為了提高工業機器人的工作效率,降低人工工作任務量,保障工業生產的精度和質量,從而設計研發的,進而完成對外界信息的識別、定位、跟蹤、搬運、夾持等指令。
參考文獻
孫鳳連,李揚.工業機器人視覺系統中雙目攝像頭標定算法研究[J].計算機與數字工程(04):30–33+97.
陳偉華,馬瓊雄,陳月軍,等.基于VisionPro的工業機器人視覺定位系統[J].組合機床與自動化加工技術,2012(2):81–83.
王一,劉常杰,楊學友,等.工業機器人視覺測量系統的在線校準技術[J].機器人(03):45–48+77.
蔣書賢.基于機器視覺的工業機器人分揀系統研究[D].西南交通大學,2015.
